
Назначение, классификация и обоснование выбора горной машины в зависимости от условий работы
Основой для повышения производительности труда на открытых горных работах являются механизация и автоматизация основных и вспомогательных работ, рост единичных мощностей машин, создание и внедрение систем машин, взаимосвязанных своими рабочими параметрами и технологическими функциями.
Основными типами горных машин, применяемых при открытой добыче полезных ископаемых, являются буровые станки, выемочно-погрузочные, выемочно-транспортирующие машины и машины для гидродобычи.
К выемочно-погрузочным машинам относятся экскаваторы, предназначенные для зачерпывания горной массы, перемещения ее на относительно небольшие расстояния и погрузки в транспортные средства или отсыпки в отвал.
Экскаваторы могут быть периодического (цикличного) и непрерывного действия.
К машинам периодического действия относят одноковшовые экскаваторы, а к машинам непрерывного действия — многоковшовые экскаваторы.
Существующие экскаваторы классифицируют по назначению и роду выполняемой работы, вместимости ковша (одноковшовые) или теоретической производительности (многоковшовые ), видам рабочего, ходового и силового оборудования.
По назначению и роду выполняемой работы одноковшовые экскаваторы, применяемые на карьерах, относятся к следующим группам:
ЭКГ -карьерные гусеничные с ковшами вместимостью 2-20 м з ; ЭГ — карьерные гидравлические на гусеничном ходу с ковшами вместимостью 2,5-40 мз ; ЭВГ — вскрышные гусеничные с ковшами вместимостью 15-100 мз (в настоящее время промышленностью не выпускаются); ЭШ — шагающие (драглайны) с ковшами вместимостью 4-125 мз .
Кроме указанных промышленностью выпускаются также экскаваторы типов: ЭО — универсальные (строительные) гусеничные и пневмоколесные с ковшами вместимостью 0,16-4 м з ; ЭКСГ — карьерно — строительные гусеничные с ковшами вместимостью 1,25-8 мз .
По конструкции рабочего оборудования одноковшовые экскаваторы делятся на две группы. К первой группе относятся экскаваторы, ковш у которых закреплен на жестких балках (стрела и рукоять) и поэтому имеет заданную траекторию движения (прямая лопата, обратная, струг).
Ко второй группе относятся экскаваторы, ковш у которых имеет гибкую (с помощью канатов) связь с машиной. Траектория движения ковша у таких экскаваторов (драглайн, грейфер) определяется весом ковша и свойствами горных пород.
Расчет гидропривода механизмов одноковшового экскаватора
... (2.1) = 5,16 с, (2.2) где q — вместимость ковша м 3 . Принимаем = 5,2с. Параметры, определяющие энергоемкость ... ковша. Максимальная сила копания Масса экскаватора: m = Р m ах /μg = 95,79/0,7∙9,81 = 13,9 т. Р max — максимальное горизонтальное усилие, возникающее при работе экскаватора; ... производится только от насоса Б. гидравлический привод одноковшовый экскаватор Полный поток может подаваться также и ...
Одноковшовые экскаваторы типа «прямая лопата» используют при выемке мягких, плотных и разрыхленных (полускальных и скальных) пород с подошвы забоя; погрузке этих пород в отвал или транспортные средства, расположенные на уровне установки экскаватора или вышележащем уступе; .при проходке траншей и на отвальных работах.
Экскаваторы типа «обратная лопата», в отличие от прямых лопат, производят выемку пород копанием ниже уровня установки экскаватора с погрузкой в транспортные средства, расположенные на уровне установки экскаватора или нижележащем уступе.
Статический расчет экскаваторов
Статический расчет экскаваторов имеет цель определить: уравновешенность поворотной платформы, устойчивость экскаватора, усилия в роликах и захватывающих устройствах опорно-поворотного круга, опорные реакции и давления на основание (грунт).
Уравновесить поворотную платформу — значит устранить выход результирующей веса платформы с механизмами и рабочим оборудованием за пределы периметра опорного круга при повороте платформы (и отвальной консоли — для многоковшового экскаватора) с полной нагрузкой и без нагрузки на рабочем органе.
В процессе экскавации у одноковшовых экскаваторов с малой и средней вместимостью ковша при максимальном вылете рукояти допускаются отрывающие нагрузки в центральной цапфе или захватывающих роликах.
М у
При определении оптимальных размеров рабочего оборудования, например драглайна, основной заданной величиной является вместимость ковша или длина стрелы. Если обе величины изменять нежелательно, то прибегают к изменению диаметра опорной базы- (в известных пределах).
Таким образом, расчет уравновешенности платформы сводится к задаче, в которой среди принятых и заданных величин имеются такие, которые могут быть изменены.
Платформа считается уравновешенной, если при любых возможных положениях поворотной части с ковшом (порожним или груженым) соблюдаются следующие необходимые условия:
- равнодействующая весов вращающихся частей с рабочим оборудованием не должна выходить за периметр многоугольника, образующегося соединением точек касания опорных катков с поворотным кругом;
- перемещения равнодействующей вперед или назад по отношению к центральной цапфе желательно иметь одинаковыми по величине.
Уравновешивание поворотной платформы достигается соответствующим размещением всех механизмов на поворотной платформе и выбором массы противовеса.
Технологические параметры машины
Экскаватор «Марион-301М» — мощная электрическая карьерная машина с рабочим оборудованием — механическая лопата прямого действия, на гусеничном ходу, предназначенная для разработки полезных ископаемых открытым способом.
Экскаваторы данных моделей относятся к категории машин, используемых потребителем за весь срок службы при условии проведения периодического технического обслуживания (ТО) и ремонта (Р) по определенной системе и при периодической замене деталей (агрегатов).
Конструкция экскаватора позволяет вести раздельно ремонт или замену узлов — блоков, как механической системы, так и электрической. Доступность к системам при монтаже — демонтаже удовлетворительная.
Часть деталей, неразъемных составных частей, как по конструктивным, так и по технологическим признакам, возможно восстанавливать многократно, а по электрооборудованию — регулировать дополнительно.
При монтаже — демонтаже механизмов, устройств и систем экскаватора необходимо применять специально изготовленные приспособления (технологическая ремонтная оснастка и оборудование) и комплект грузозахватных канатных строп.
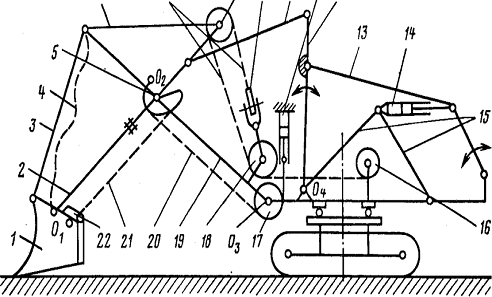
Экскаватор (рис.1) состоит из рабочего оборудования, поворотной платформы с расположенными на ней механизмами и нижней рамы с ходовыми тележками.
Рабочее оборудование включает ковш, рукоять, стрелу, поворотный механизм, механизмы открывания и торможения днища ковша.
Поворотная платформа служит основанием для размещения механизмов экскаватора: подъемной лебедки, механизмов поворота, электрической системы.
Поворотная платформа экскаватора через кольцевой рельс опирается на роликовый круг, лежащий на кольцевом рельсе зубчатого венца. Поворотная платформа соединена с нижней рамой центральной цапфой.
Техническая характеристика экскаватора «Марион-301М»
|
Наименование показателя |
Значение показателя |
|
Длина стрелы, м |
18,3 |
|
Диаметр шкива стрелы — Диаметральный питч |
2,4 |
|
Длина рукояти ковша, м |
11,7 |
|
Емкость ковша, м 3 |
24,5-61,2 |
|
А — Угол стрелы, градус |
45 |
|
В — Высота разгрузки — Максимальная, м |
9,9 |
|
С — Радиус разгрузки при максимальной высоте, м |
19,5 |
|
D — Высота разгрузки при максимальном радиусе |
7,0 |
|
E — Радиус разгрузки — Максимальный |
20,0 |
|
F — Высота резания — Максимальная, м |
17,6 |
|
G — Радиус резания — Максимальный |
23,7 |
|
H — Радиус зачистки |
15,5 |
|
J — Габаритный радиус — Снаружи головного шкива |
17,9 |
|
K — Габаритная высота — Над головным шкивом стрелы, м |
18,8 |
|
L — Длина гусеничного хода, м |
11,4 |
|
M — Ширина гусеничного хода, м |
10,7 |
|
N — Ширина гусеничного полотна, м |
1,7 |
|
Среднее удельное давление на грунт при передвижении, кг/м 2 |
3,6 |
|
O — Земляной просвет под нижней рамой, м |
0,8 |
|
P — Габаритный радиус — Задний торец |
9,2 |
|
Q — Земляной просвет под рамой, м |
2,5 |
|
R — Габаритная высота — Портал, м |
13,0 |
|
S — Габаритная высота — Машинное отделение, м |
9,2 |
|
T — Габаритная высота — Корпус фильтро — вентилятора, м |
12,0 |
|
V — Габаритная ширина — Машинное отделение, м |
10,2 |
|
Подъемная лебедка — Диаметральный питч |
1,5 |
|
Диаметр троса подъема (двухниточный), мм |
67 |
|
Диаметр вантовой подвески стрелы (состоящий их четырех), мм |
82 |
|
Двигатель подъема, кВт |
969 |
|
Двигатели поворота, два, кВт |
746 |
|
Двигатели хода, два, кВт |
478 |
|
Двигатели напора, два, кВт |
380 |
|
Скорость поворота, обор/мин |
2,83 |
|
Скорость движения, км/час |
1,2 |
|
Транспортировочная масса, кг |
871 |
|
Экспортный транспортировочная масса, кг |
899 |
|
Рабочая масса, кг |
1116 |
|
Балласт (поставляется покупателем), кг |
245 |
|
Минимальная масса балласта, кг/м 3 |
4005 |
Таблица 2, Масса узлов экскаватора Марион-301
|
Наименование |
Вес, х10 3 фунтов |
Вес, х10 3 кг. |
||
|
Полотно гусеницы (47 траков) |
90,33 |
40,9736 |
||
|
Гусеничный башмак в пальцами |
1,92 |
0,8709 |
||
|
Гусеница в сборе |
147,56 |
66,933 |
||
|
Конструкция |
74,83 |
33,942 |
||
|
Переднее натяжное колесо |
5,05 |
2,29 |
||
|
Опорный каток |
2,015 |
0,914 |
||
|
Заднее натяжное колесо |
3,75 |
1,701 |
||
|
Ведущая звездочка |
7,12 |
3,2296 |
||
|
Главный вал хода |
3,85 |
1,7463 |
||
|
Ходовой редуктор |
15,85 |
7,18 |
||
|
Двигатель хода с тормозом |
11,43 |
5,1846 |
||
|
Тормоз хода |
0,6 |
0,27216 |
||
|
Нижняя рама в сборе |
207 |
93,8952 |
||
|
Конструкция нижней рамы |
152,5 |
69,174 |
||
|
Венцовая шестерня с рельсами |
43,6 |
19,7769 |
||
|
Венцовая шестерня |
34,5 |
15,6492 |
||
|
Сегмент рельса роликового круга |
0,83 |
0,3764 |
||
|
Центральная цапфа |
8,42 |
3,8193 |
||
|
Роликовый круг |
10,58 |
4,799 |
||
|
Сегмент роликового круга |
1,5 |
0,6804 |
||
|
Ролик |
0,15 |
0,06804 |
||
|
Поворотная платформа без крыла, машинного отделения и балласта |
173 |
78,4728 |
||
|
Конструкция |
154 |
69,8544 |
||
|
Гайка центральной цапфы |
1,165 |
0,52844 |
||
|
Стопорная пластина центральной цапфы |
0,485 |
0,21999 |
||
|
Токоприемник в сборе |
2,485 |
1,12719 |
||
|
Токоприемные кольца |
1,75 |
0,7938 |
||
|
Вал подъемной лебедки в сборе |
51,64 |
23,4239 |
||
|
Подъемная шестерня |
22,74 |
10,3148 |
||
|
Торец барабана |
4,23 |
1,9187 |
||
|
Подъемная лебедка |
12,8 |
5,806 |
||
|
Станина подъема, левая |
7,945 |
3,6038 |
||
|
Станина подъема в сборе, правая |
33,6 |
15,2409 |
||
|
Промежуточный вал подъема |
5,395 |
2,4471 |
||
|
Подъемный редуктор |
14,17 |
6,4275 |
||
|
Кожух подъемного редуктора |
1,625 |
0,7371 |
||
|
Двигатель подъема с воздуходувкой и тормозом |
21,23 |
9,6299 |
||
|
Основание двигателя подъема |
3,02 |
1,3698 |
||
|
Вспомогательная лебедка |
1,285 |
0,58287 |
||
|
Поворотный редуктор |
6,59 |
2,9892 |
||
|
Двигатель поворота с воздуходувкой и тормозом |
5,88 |
2,6671 |
||
|
Тормоз поворота |
0,6 |
0,27216 |
||
|
Главный поворотный вал |
4,41 |
2,00037 |
||
|
Главная обегающая шестерня |
0,64 |
0,2903 |
||
|
Портальная стойка в сборе |
29 |
13,1544 |
||
|
Передняя стойка с площадкой |
24,255 |
11,002 |
||
|
Задняя стойка |
4,745 |
2,15233 |
||
|
Модуль левого крыла |
50,925 |
23,0995 |
||
|
Конструкция левого крыла |
8,71 |
3,9508 |
||
|
Модуль правого крыла |
51,985 |
23,5804 |
||
|
Конструкция правого крыла |
8,265 |
3,749 |
||
|
Балластный ящик с балластом |
700 |
317,52 |
||
|
Балластный ящик |
155 |
70,308 |
||
|
Модуль балластного ящика |
69 |
31,2984 |
||
|
Блок фильтра — вентилятора машинного отделения |
21,1 |
9,57096 |
||
|
Кабина оператора |
8,86 |
4,01889 |
||
|
Кондиционер воздуха |
0,705 |
0,31978 |
||
|
Механизм ОДК в сборе |
3,3 |
1,49688 |
||
|
Двигатель |
0,705 |
0,31978 |
||
|
Редуктор |
0,88 |
0,39916 |
||
|
Стрела в сборе |
227,865 |
103,359 |
||
|
Конструкция стрелы |
125,06 |
56,7272 |
||
|
Головной шкив стрелы |
5,18 |
2,34968 |
||
|
Седловой подшипник |
43,76 |
19,8495 |
||
|
Напорный вал |
3,12 |
1,4152 |
||
|
Шестерня напорного вала |
5,38 |
2,4403 |
||
|
Кремальерная шестерня напорного вала |
1,17 |
0,5307 |
||
|
Кожух шестерни напорного вала |
0,725 |
0,3288 |
||
|
Редуктор напора |
3,195 |
1,4492 |
||
|
Двигатель напора с тормозом |
4,485 |
2,03439 |
1,06 |
0,4808 |
|
Трапики и площадки |
9,61 |
4,359 |
||
|
Рукоять ковша с успокоителем днища |
122,5 |
55,566 |
||
|
Успокоитель днища ковша |
1,1 |
0,4989 |
||
|
Передняя часть ковша в сборе |
67 |
30,3912 |
||
|
Зуб ковша в сборе |
0,9 |
0,4082 |
||
|
Днище ковша в сборе |
19 |
8,6184 |
||
|
Засов |
0,94 |
0,42638 |
||
|
Рычаг засова |
0,54 |
0,24494 |
||
|
Пластина износа ковша |
7,18 |
3,25684 |
||
|
Трос подъема, каждый |
4,475 |
2,02986 |
||
|
Винтовая подвеска стрелы |
2,33 |
1,05688 |
Устройство и принцип работы машины
Любой экскаватор состоит из
— рабочего оборудования (у одноковшовых экскаваторов оно же и транспортирующее), транспортирующего, механического, включающего главным образом передаточные механизмы (трансмиссии), ходового и силового оборудования, а также механизмов управления, металлоконструкций платформы и надстройки, кузова.
Одним из главных признаков различия одноковшовых экскаваторов, определяющих их назначение и область применения, является рабочее оборудование.
Основные виды рабочего оборудования одноковшовых экскаваторов, применяемых на открытых работах — прямая напорная лопата и драглаЙн. Более ограниченно используют обратную лопату, грейфер, струг.
Выпускают четыре вида прямой лопаты: напорную с выдвижной рукоятью, напорную коленно-рычажную, напорную с рабочим оборудованием «Суперфронт» и гидравлическую.
Экскаватор типа прямая напорная лопата состоит из рабочего оборудования, поворотной платформы с кузовом и ходовой гусеничной тележки.
Рабочее оборудование включает в себя ковш, стрелу и рукоять. На верхней кромке ковша установлены сменные зубья, которые после затупления поворачивают на 1800. Днище ковша откидное; при опускании ковша вниз оно автоматически захлопывается. При разгрузке ковша днище открывается тросом с помощью электродвигателя, установленного на стреле. Стрела опирается на поворотную платформу с помощью пятого шарнира и поддерживается в наклонном положении стреловым канатом ,проходящим через блоки, установленные на конце стрелы ,и двуногой стойке.
Ковш при зачерпывании породы поднимается канатом, который перекинут через головной блок и навивается на барабан подъемной лебедки, установленной на поворотной платформе. Подъем ковша совмещается с подачей рукояти на забой с помощью механизма напора. Экскаватор ЭКГ имеет зубчато-реечный механизм напора, расположенный на стреле, который передает усилие на зубчатую рейку рукояти, удерживаемую в зацеплении с кремальерной шестерней механизма напора седловым подшипником. Рукоять может поворачиваться вокруг напорного вала при подъеме и опускании ковша и двигаться вдоль своей оси при напоре и возврате ковша.
На поворотной платформе кроме подъемной установлены также стреловая лебедка, поворотный механизм, силовое оборудование и механизмы управления экскаватором.
Поворотная платформа через роликовый круг опирается на раму гусеничной тележки, с которой неподвижно соединен зубчатый венец. В зацеплении с венцом находятся выходные шестерни редукторов механизма поворота. При включении поворотного механизма платформа вместе с рабочим оборудованием может поворачиваться вокруг вертикальной оси в обе стороны на любой угол.
Зубчато-реечным механизмом напора оснащаются экскаваторы, выпускаемыми ПО «Уралмаш».
В экскаваторах типа прямая напорная лопата ЭКГ-8И, ЭКГ-12,5 и других, выпускаемых ПО «Ижорский завод», применяется канатный механизм напора. Выдвижение и возврат рукоятки производятся канатами при помощи напорной лебедки, расположенной на поворотной платформе, и блоков и полу блоков, расположенных соответственно на стреле и рукояти.
Прямые коленно-рычажные напорные лопаты имеют рукоять, кинематически не связанную со стрелой, и перемещающуюся между стойками стрелы. Такие мех лопаты выпускаются также с двумя системами напора — зубчато реечной и канатной.
Основные рабочие размеры прямой напорной лопаты: радиус копания RK, радиус копания на уровне стояния экскаватора RKY, радиус разгрузки Rp , высота копания Нк , глубина копания hK , высота разгрузки Нр •
Глубина черпания прямых лопат обычно невелика, поэтому они работают в забоях, расположенных выше уровня стояния экскаватора. Рабочие размеры зависят от длины стрелы, рукояти и от угла наклона стрелы. Угол наклона стрелы обычно составляет 450, но может быть равен ЗО-60 0 .
Рабочий цикл экскаватора предусматривает копание (черпание), поворот для разгрузки, разгрузку ковша, поворот к забою и
- опускание ковша.
У прямой напорной лопаты с рабочим оборудованием «С у пер Ф р о н т» траектория движения ковша образуется при взаимодействии трех механизмов: подъема, напора и поворота ковша. Рабочее оборудование состоит из ковша, рукояти и стрелы. Механизм подъема включает в себя подъемную лебедку, канат, нижний, установленный на стреле блок, образующий с верхним и уравнительным блоками полиспастную систему подъема рамы и через подъемное звено — ковша. Два напорных гидроцилиндра, закрепленные на двуногой стойке, перемещают при помощи тяги и мачты, поворачивающейся относительно оси напорное звено , передающее усилие на раму. При этом гидрофиксатор через канат , блок, профильный полу блок и канат удерживает ковш от поворота по часовой стрелке вокруг оси. Поворотом рамы механизмом подъема или напора вокруг оси производится возврат ковша звеном в исходное положение. ковш поворачивается относительно оси до полного выбирания слабины каната фиксации положения ковша. Днище ковша при разгрузке открывается пневмоцилиндрами. Стрела может подниматься и опускаться, поворачиваясь вокруг шарнира 0з за счет перемещения мачты гидроцилиндрами.
Рабочее оборудование «Суперфронт» (фирма «Марион» США) может перемещать ковш параллельно падошве уступа и эффективно внедрять его в нижнюю часть забоя. Для этого используются вес стрелы, рукояти, а также механизмы подъема и поворота ковша. Однако экскаваторы с данной конструкцией рабочего оборудования имеют пока ограниченное применение.
Механизм подъема
Построение нагрузочных и скоростных диаграмм для предварительного определения средневзвешенной мощности двигателей механизмов подъема, напора и поворота производится исходя из следующих соображений.
t ц ‘
t K )
Мощность двигателя подъема N за период копания (П положение рукояти, см. рис. 14.1) определяется по формуле (14.2) при значениях
- Sn 11′ V1 = Уп ‘ K1 1 и 11i = 11п — 0,8-+0,85,
где 11п — к.п.д механизма подъема.
t p )
Усилия, возникающие в механизме подъема за время поворота груженого ковша, можно определить из У положения рукояти или по формуле (14.3).
Тогда мощность двигателя подъема за период поворота груженого ковша на разгрузку ± N’ п определяется из выражения (14.2) при значениях
K 1
Знаки плюс и минус показывают, что двигатель может работать как в двигательном, так и в генераторном режиме.
t з )
В этом случае мощность двигателя механизма подъема N»п определяется по формуле (14.2)
Таким образом, средневзвешенная мощность двигателя механизма подъема по предварительно построенным нагрузочной и скоростной диаграммам будет
(Nпt к
Механизм напора
р = 900 и Ур = 0.
В соответствии с формулой (14.7)
SH,aJ=P02= (0,5+1)P 01
При этом скорость перемещения рукояти принимается равной номинальной скорости механизма напора V н’ Скорость напора должна БЬ1ТЬ достаточной, чтобы за время копания (к произошло выдвижение рукояти на весь ход L. Поэтому выбранная скорость УН не должна Быть меньше YH?:.L (К ‘ Скорость возвратного хода рукояти берется в 1,7-2 раза больше скорости напора. Следовательно, мощность двигателя напора NH за период копания определится по формуле (14.2)
( р )
t з )
Мощность двигателя механизма напора N» н за период tз определяется из формулы (14.2) при значениях 81 = 5и .а v и У! = Ун’ Тогда средневзвешенная мощность двигателя механизма напора за цикл работы
(Nиt к
Механизм поворота
Расчетная частота вращения платформы также устанавливается по допустимой величине углового ускорения. .
Средневзвешенная мощность NB(CB) (кВт) двигателя поворотного механизма определяется выражением
N _I\IC ‘w; . (‘л.г +’лл)'(1 +З,,~)
В(СВ) ————,
2’103 (t p
где J Л.Г и J лл — моменты инерции ПОВОРОТНQЙ платформы соответственно с груженым и порожним ковшом, определяемые по формуле (14.14) ; w3 — заданная угловая скорость (частота пз ) вращения поворотной платформы; ТJв — К.П.д передачи поворотного механизма; tp ‘ ta — время поворота платформы соответственно на разгрузку и с порожним ковшом к забою.
t p
Iп.п)ШЗ· t р-l. (14.13)
Суммарный момент инерции одноковшового экскаватора J (кг ,м 2 ) относительно оси его вращения
О = О т + О с + О к+п + О и + О Рэ (14ю14)
где J п , Jc ‘ JK+n (JK~’ lи, !i..~ моменты инерции соответственно поворотной платформы, стрелы, ковша с породой(или порожнего ковша J к), механизма напора и рукояти относительно оси вращения платформы.
Момент инерции поворотной платформы со сторонами, равными длине L Д’ ширине Lш и высоте кузова 4. платформы, относительно вертикальной оси вращения экскаватора
(О,5L д )2
где J о — момент инерции поворотной платформы относительно вертикальной оси, проходящей через центр массы параллелепипеда, кг ,м 2 ; тп — масса платформы, кг;
Кпт з , (14.16)
К п — коэффициент, равный 0,48-0,51 для карьерных мехлопат; 0,43-0,45 ДЛЯ вскрышных лопат и 0,7-0,8 для драглайнов; тз — масса экскаватора, определяемая по формуле (10.7), кг; гп — расстояние между осью
0,5L д
r п.С — радиус пяты стрелы, определяемый по формуле (10.8), м.
Момент инерции стрелы относительно оси вращения экскаватора с достаточной точностью может быть определен по формуле
‘Г~, (14.17)
где т с — масса стрелы, определяемая по формуле (10.6), кг; гс — расстояние от оси вращения платформы до середины стрелы, м.
Момент инерции ковша с породой
‘Г~, (14.18)
где mK+n — масса ковша с породой, кг. Определяется суммированием выражения (10.2) или (10.4) с выражением (l 0.5); Г в — максимальный радиус разгрузки, определяемый из выражения (10.8), м.
Момент инерции напорного механизма
н=ти’Г~, (14.19)
т н
Момент инерции рукояти
‘T~, (14.20)
где т р — масса рукояти, определяемая по формуле (10.9), кг; Гр — расстояние от центра тяжести рукояти до оси вращения экскаватора, м.
Расчет производительности машины
Условия работы приводов главных механизмов
Привод механизма подъема ковша мехлопаты преодолевает следующие усилия: при черпании породы от сопротивления породы копанию и веса ковша с породой; при повороте платформы и ковша на разгрузку — от веса ковша с породой; при повороте платформы и порожнего ковша к забою — от веса порожнего ковша.
Скорость перемещения ковша при этом соответственно изменяется: при черпании породы она имеет номинальное значение; при повороте платформы и ковша на разгрузку в тормозных режимах — пониженное до 10-30 % номинальной и при повороте и спуске порожнего ковша в забой — повышенное до 130 % номинальной.
Привод механизма напора преодолевает следующие усилия: при черпании породы — отжатая ковша от забоя, от составляющих веса рукояти и ковша с породой, а также составляющую от усилия в подъемном канате (канатах), направленную вдоль оси рукояти; при повороте груженого ковша на разгрузку — от составляющих веса ковша с породой и рукояти, а также составляющую от усилия в подъемном канате (канатах); при повороте порожнего ковша к забою — усилия от составляющих веса порожнего ковша и рукояти.
Скорость перемещения рукояти близка к номинальной при копании и повороте порожнего ковша к забою, но понижается до 30 % номинальной при повороте груженого ковша к забою, когда при вод работает в тормозных режимах.
t ц
t l
N 1
по’ (по ]-1
N = Н. t
- t·
св t I I f 1, (14.1)
t l
Н 1
«i 1 ,
К 1
Для определения N CB необходимо предваритеJ1ЪВ построить диаграммы нагрузок механизмов (см. рис. 14. и 14.4), отражающие зависимость усилий 8 в функции в времени: 8 = f( t), и скоростные диаграммы, отражающие взависимость частоты вращения или скорости перемешения рабочего органа за те же отрезки времени: n = f( t) или v=f(t).
Требования безопасной эксплуатации машины
Правильная организация: работы , обеспечивающая максимальную производительность экскаватора, предусматривает соответствующую подготовку экскаваторных работ и применение рациональной техники выполнения экскавации в соответствии с «Правилами безопасности», «Правилами технической эксплуатации при разработке месторождений полезных ископаемых открытым способом» и с заводскими инструкциями по эксплуатации.
Члены бригады, обслуживающей экскаватор, должны четко знать и строго выполнять правила и инструкцию по технике безопасности, составленные применительно к конкретным условиям каждого карьера на основании положений «Единых правил безопасности при разработке месторождений полезных ископаемых открытым способом». Инструкция вывешивается на экскаваторе и выдается под расписку машинисту и его помощнику.
К управлению экскаваторами допускаются лица не моложе 18 лет, прошедшие специальное обучение и имеющие удостоверение на право управления экскаватором данного типа и марки, а также прошедшие медицинское освидетельствование и инструктаж по технике безопасности. Без разрешения механика машинист экскаватора не должен допускать к управлению экскаватором посторонних. Работа стажера или помощника машиниста допускается только под наблюдением машиниста смены:.
При комплексной механизации производственного процесса машинист экскаватора должен знать правила безопасной работы на всех машинах, участвующих в комплексе так как он является ответственным за соблюдение правил техники безопасности и противопожарных правил всеми рабочими, обслуживающими экскаватор и транспортные средства.
Каждый экскаватор должен быть оборудован звуковой сигнализацией. Значение сигналов должно быть разъяснено всем рабочим, связанным с работой экскаватора. Перед началом работы машинист смены обязан внимательно осмотреть и принять экскаватор. Мелкие неисправности, подлежащие немедленному ремонту, следует устранять до начала работы. Проверка машины должна проводиться в определенной последовательности по ранее разработанной схеме. При этом производят тщательный наружный осмотр металлоконструкций, всех механизмов экскаватора и тормозов с опробованием действия последних, проверяют крепление и состояние зубьев ковша, проверяют состояние противопожарных средств и безопасность электрооборудования.
Меры безопасности при работе экскаваторов.
Категорически запрещается проносить ковш над людьми и кабиной шофера. Во время погрузки шофер должен выходить из кабины, если она не имеет бронированного щита. При работе в темное время суток место работы экскаватора и подъездные пути для транспортных средств должны быть хорошо освещены. При работе в населенной местности участок работы экскаватора должен быть огражден; в ночное время ограждение должно быть освещено. Если в забое производятся взрывные работы:, экскаватор необходимо отвести на безопасное расстояние и повернуть к месту взрыва тылвойй частью кабины. Во время работы экскаватора запрещается находиться в радиусе его действия, производить смазку , регулировку механизмов, очистку машины от грязи, сходить с экскаватора и подниматься на него. Очистку ковша от налипшей породы и замену зубьев можно производить только после того, как ковш будет опущен на почву.
Меры безопасности при передвижении экскаватора
Спуск и подъем экскаватора своим ходом осуществляются только под углом, не превышающим указанного в его технической характеристике. Спуск и подъем под углом большим, чем указано, необходимо производить с помощью трактора или лебедки в присутствии механика, производителя работ или мастера.
Путь, по которому будет перемещаться экскаватор, должен быть заранее выровнен и спланирован, а на слабых грунтах усилен щитами или настилом из досок, брусьев или шпал. Для перехода через мосты, трубопроводы, насыпи необходимо предварительно получить разрешение от соответствующей организации.
Противопожарные .мероприятия.
В случае пожара пламя следует тушить с помощью огнетушителя или засыпая землей, песком, или накрывая горящий предмет плотной тканью (брезентом).
Паяльные, сварочные и другие работы, связанные с образованием пламени, можно допускать на экскаваторе только при невозможности демонтировать и въщести деталь для выполнения этих работ снаружи. При этом должны быть выполнены все мероприятия для защиты работающих от ожогов и исключена возможность возникновения пожара.
Список литературы
[Электронный ресурс]//URL: https://inzhpro.ru/kursovoy/temyi-diplomnyih-rabot-gornyie-mashinyi-i-oborudovanie/
l.Подэрни Р.Ю. Горные машины и комплексы для открытых работ. М. Издательство МГГУ.2001.
-Бритаев В.А., Замышляев В.Ф. Горные машины и комплексы. м.недра.1984г. 3.Справочник механика открытых работ. под ред. М.И.Щадова и Р.ю.подэрни. М.Недра.1989.
-РжевскиЙ В.В.Открытые горные работы. ЧастьП. Технология и комплексная механизация-4-е изд.м.недра.1985.