
Адаптация (аккомодация) является основной реакцией живого организма, обеспечивающей ему возможность выживания. Она означает приспособление организма к изменяющимся внешним и внутренним условиям. Реализация этого принципа в технических системах, а именно в робототехнике, по-видимому, имеет много достоинств, а иногда и просто необходима. Понятие адаптации или адаптивности в технике носит очень широкий характер и имеет поэтому много толкований. К сожалению, до сих пор нет точного общепринятого определения адаптивной системы, поэтому попытаемся пояснить смысл этого термина следующими рассуждениями.
Как известно, с помощью разомкнутого управления без обратной связи можно исключить влияние на выходные параметры объекта некоторых предсказуемых внешних возмущений при условии, что характеристики отдельных компонент и элементов системы управления достаточно просты и их свойства не изменяются.
Ликвидировать влияние непредсказуемых внешних возмущений на поведение объекта возможно в рамках традиционной теории управления. Для этого необходимо использовать принцип обратной связи, т.е. организовать замкнутую систему управления, свойства всех элементов которой полагаются известными и не изменяющимися во времени. Иногда может допускаться дрейф некоторых характеристик, но в очень незначительных пределах. Однако на практике часто встречаются такие объекты управления, амплитудные и частотные параметры которых варьируются в широких пределах под действием внешних причин с течением времени и в силу свойств самого объекта. В несколько раз может изменяться момент инерции манипулятора в сложенном состоянии по отношению к полностью вытянутому; вязкость рабочей жидкости в полостях гидроцилиндров подводного робота, работающего на разных глубинах моря при различных глубинах и температуре воды; трение в опорах двигателей в процессе загрязнения и старения смазки и многие другие характеристики. В то же время при управлении сложными объектами – гибкими производственными модулями, линиями или участками, состоящими из многих единиц оборудования, количество внешних и внутренних факторов, оказывающих возмущающее действие на их работу, резко возрастает. Среди них могут быть ошибки позиционирования заготовок или даже их отсутствие в нужный момент, износ обрабатывающего инструмента, отклонение стыка свариваемых деталей от заданной траектории движения электрода сварочного автомата, раскачивание деталей на подвесном конвейере в процессе захвата их роботом и другие подобные факторы, требующие адаптации управляющей системы, т.е. самонастройки и приспособления к реальным условиям эксплуатации. Реакция системы управления проявляется в изменении структуры, параметров, а иногда и алгоритма действий так, чтобы гарантировать достижения поставленной цели.
Разработка приложения для смартфонов под управлением операционной ...
... разработку на языке С++. Целью дипломной работы является разработка приложения для смартфонов под управлением операционной системы Android. Требовалось разработать масштабируемое приложение с поддержкой всех современных устройств на ... На рисунках 3,4 представлен внешний вид среды разработки. Рисунок 3 - Внешний вид среды разработки приложения На рисунке выше представлен базовый вид среды разработки. ...
Существуют общие свойства, характеризующие процесс адаптации:
- выходные параметры объекта регулирования и характеристики возмущающих факторов находятся под постоянным контролем и управлением с помощью устройств, дополнительно включаемых в состав управляющей системы;
- наблюдаемое поведение объекта описывается некоторым показателем качества, оценивающим в количественной форме характер протекания процесса управления;
— отклонение показателя качества за пределы допуска влечет за собой автоматическую настройку параметров регулятора или замену алгоритма управления, результатом которых является достижение желаемого показателя качества или реализации поставленной цели.
Описанные свойства присущи в более или менее ярко выраженной форме всем адаптивным системам управления, всегда являющимися системами с обратной связью.
Уровни адаптации
В зависимости от цели управления адаптивные системы в робототехнике можно условно разделить на
Первый уровень
второго уровня адаптации
третьего уровня
Одной из сложных с точки зрения автоматизации является операция абразивной зачистки литья, особенности которой заключаются в криволинейности формы отливок, отсутствии на них базовых поверхностей, которые можно было бы принять за начало отсчета для последующих точных перемещений и износ абразивного инструмента, поэтому выполнить абразивную зачистку или шлифование изделий, используя робот с программным управлением, практически невозможно. Решение этой задачи можно найти только в классе адаптивных систем, дополнив управляющее устройство робота средствами для контроля качества обработки поверхности отливки, датчиками сил резания и износа абразивного инструмента.
Система управления адаптивного модуля абразивной зачистки, анализируя степень шероховатости поверхности, может принять решение о повторном цикле обработки текущего участка детали или дать команду роботу переместить в зону шлифования следующий ее участок. Одновременно, используя информацию о силах резания и оценивая износ абразивного инструмента, адаптивная система управления может организовывать оптимальные с точки зрения производительности режимы обработки.
Другим примером адаптации робототехнической системы, при которой происходит изменение алгоритма управления, служит гибкая производственная система, например, механообработки, включающая в себя несколько единиц или десятков металлорежущих станков, объединенных автоматической транспортной складской системой. Такая система функционирует по заданной программе до тех пор, пока не произойдет какой-либо сбой. Если, например, выйдет из строя один из обрабатывающих центров, то система управления ГПС должна, оперативно оценив обстановку, принять решение о последующих действиях, разработать, возможно ценой снижения производительности, новую технологическую схему последовательной обработки изделий, выпускаемых данной гибкой производственной системой, и обеспечить функционирование станков и транспорта по новой маршрутной схеме до тех пор, пока ремонтная бригада не вернет в строй аварийный станок.
Разработка модели системы автоматического управления с линейным ...
... после оптимизации 3. Синтез нечеткого регулятора Требуется синтезировать вместо линейного корректирующего устройства нечеткий регулятор на базовом режиме ... нечеткий регулятор. Сформированы диапазоны и правила нечеткого регулятора. При сравнительной оценке качества управления системы прототипа и нечеткой системы регулирования, выяснено что улучшилось перерегулирование в САУ с нечетким регулятором ...
Рассмотренные уровни адаптации робототехнических систем различаются не столько количеством дополнительных устройств, обеспечивающих сбор и обработку информации об изменении параметров оборудования, внешней среды и характере их взаимодействия, сколько возможностью организовывать системы, способные функционировать во все более сложных, непредсказуемых изменениях условий эксплуатации.
Особенности адаптивных систем управления
Общие принципы организации адаптивной системы управления можно проследить на примере промышленного робота, осуществляющего съем деталей с подвесного конвейера и укладку их в тару.
Если момент прохождения деталью заданного положения известен, то задание может быть выполнено роботом, управляемым по жесткой программе. Для этого достаточно задать координаты точек позиционирования в исходном положении, положении захвата и положении тары, в которую ориентированно укладываются детали. Алгоритм, лежащий в основе программы действий робота, можно представить в следующем виде:
1 – задать координаты точек позиционирования;
2 – перенести захватное устройство в положение захвата детали;
3 – перейти в положение захвата детали;
4 – включить пневматическое захватное устройство;
5 – перейти в исходное положение;
6 – перенести захватное устройство с деталью к таре;
7 – выключить пневматическое захватное устройство;
8 – повторить с метки 2.
Однако успешная перегрузка деталей с конвейера в тару будет продолжаться, пока не возникнет пусть даже незначительное отклонение положения детали от заданного в программе. Причиной отклонения может быть неравномерность скорости движения конвейера или раскачивание детали. В этом случае деталь будет захвачена роботом неверно или не будет захвачена вовсе. Естественно, робот не заметит подобного сбоя и будет продолжать совершать ошибочные действия, пока не вмешается человек-оператор и не выключит его.
Сбои из-за неравномерности движения конвейера можно исключить, сохранив программный режим работы. Для этого достаточно оснастить конвейер датчиком, срабатывающим в момент прохождения крюком конвейера заданного положения захвата, установив в управляющей программе между метками 2 и 3 условный оператор, разрешающий переход на метку 3 только после получения сигнала датчика.
Однако введение в систему управления датчика положения крюка конвейера не исключает сбоев от раскачивания деталей. Кроме того, программное управление оказывается бессильным, если детали неверно подвешены на конвейере. Очевидно, что решить данную задачу под силу только адаптивной системе управления. Для этого существующий робототехнический модуль необходимо оснастить не только датчиком положения крюка, а еще и средствами для распознавания деталей и измерения координат точки для их захвата. В этом случае рассмотренный выше алгоритм действий робота модифицируется в такую последовательность:
Цифровая и микропроцессорная система управления промышленным роботом
... 1 0 0 0 На основе графа функционирования составим дизьюнктивно - нормальную функцию (ДНФ) управления приводом робота. Проведем минимизацию полученной ДНФ ; Реализовать полученные логические зависимости можно либо ... повседневной работе, например, функции задержки включения и выключения и импульсное реле часовой выключатель двоичные маркеры входы и выходы в соответствии с типом устройства Что может ...
1 – задать координаты точек позиционирования: исходной и тары;
2 – перенести захватное устройство в исходное положение;
3 – по сигналу датчика положения крюка произвести распознавание детали, измерить координаты точки захвата и ориентацию детали;
4 – перейти в положение захвата, ориентировать захватное устройство по отношению к оси детали;
5 – включить пневматическое захватное устройство;
6 – перейти в исходное положение;
7 – перенести захватное устройство с деталью к таре;
8 – выключить пневматическое захватное устройство;
9 – повторить с метки 2.
Таким образом, дополнительные устройства, введенные в систему управления, и модификация исходной программы позволяют обслуживать конвейер, перемещающийся с априори неизвестной скоростью и произвольным, в определенных пределах, расположением деталей.
Структура адаптивных систем управления
Анализируя функции программной и адаптивной систем управления роботом, решающим рассматриваемую задачу, можно заметить, что они отличаются только устройствами, воспринимающими информацию о внешней среде. Эти устройства обрабатывают эту информацию и выбирают последовательность обхода уже имеющихся в программе робота точек позиционирования (рис.1).
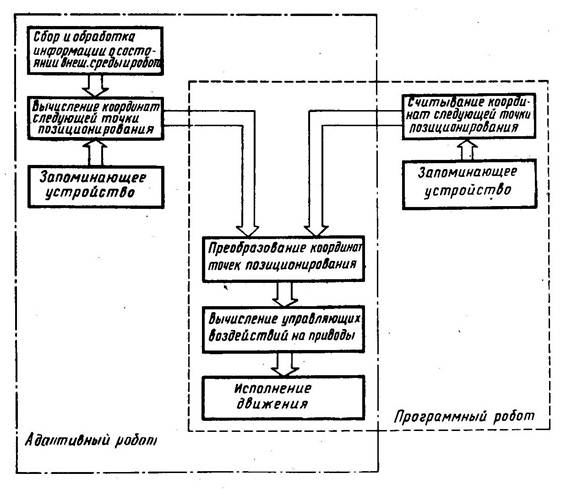
Рис.1. Схемы управления адаптивным и программным
роботом.
Компоненты адаптивной и программной среды, отвечающие за исполнение выбранной последовательности обхода заданных точек, оказываются сходными.
основное свойство адаптивных систем
Функции управления адаптивным роботом выполняет вычислительное устройство, уровень сложности которого определяется уровнем адаптации робота. В простейшем случае это может быть микропроцессор или микроЭВМ, для сложных адаптивных робототехнических систем вычислительное устройство может представлять собой мультимикропроцессорную сеть.
Для современных адаптивных робототехнических систем характерно совмещение в вычислительном устройстве функции адаптации к изменениям внешней среды и параметров приводов робота с широким набором аппаратурных и программных средств самодиагностики и устранения мелких неисправностей в самой системе управления.
На рис.2 показан один из возможных вариантов структуры мультимикропроцессорного устройства, управления адаптивным роботом. Устройство включает в себя однотипные микропроцессоры (МП), объединенные общей магистралью и обменивающиеся информацией с общим оперативным запоминающим устройством (ОЗУ).
Каждый из микропроцессоров имеет свое собственное локальное запоминающее устройство (ЛЗУ) для хранения команд и данных и устройство ввода-вывода информации (УВВ) для связи с периферийной аппаратурой, работой которой управляет данный микропроцессор. Связь между микропроцессором, его памятью и устройством ввода-вывода осуществляется с помощью локальной магистрали.
Несмотря на то, что микропроцессорные модули имеют одинаковую структуру, они выполняют различные функции. Так, один из них осуществляет сбор и обработку внешней информации, другой обеспечивает связь с терминалом и интерпретирует команды оператора, третий вычисляет управляющие воздействия и контролирует работу приводов робота, а четвертый отвечает за связь с внешним технологическим оборудованием и верхним уровнем управления автоматической линией или участком.
Управление техническими системами
... их изменения по заданному алгоритму. Управляемая система называется объектом управления. Система управления – это совокупность объекта управления (технической системы), технических средств контроля и управления, и оперативного персонала, выполняющего задачу управления. В зависимости от уровня сложности ...
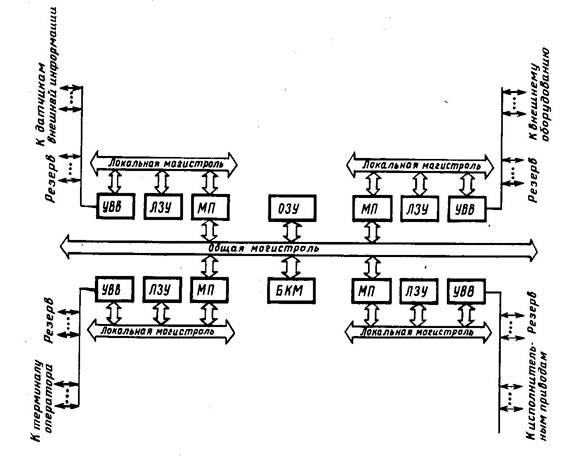
Рис.2. Структура мультимикропроцессорного устройства адаптивного управления роботом.
самодиагностики и саморемонта
Анализируя порядок прохождения сигналов по общей магистрали и их параметры, БКМ оценивает исправность отдельных микропроцессорных модулей и приемопередатчиков, связывающих микропроцессоры с общей магистралью. Если какой-либо микропроцессорный модуль вышел из строя, то наряду с сообщением о замеченной неисправности, передаваемым оператору на верхний уровень управления, блок контроля магистрали формирует команду на отключение аварийного модуля и передачу его функций работоспособным микропроцессорам. Если же вышел из строя только приемопередатчик микропроцессора, то по команде БКМ может измениться структура связей между микропроцессорами. Например, используя резервные каналы ввода-вывода, имеющие, как правило, меньшую пропускную способность, чем общая магистраль, можно осуществлять передачу информации между микропроцессорами, соединив их по принципу «каждый с каждым».
Конечно, саморемонт адаптивной системы является временной, вынужденной мерой, так как при этом несколько снижается производительность вычислительного устройства, однако живучесть робототехнического модуля оказывается очень высокой.
Программное обеспечение систем управления адаптивных роботов
Функции программного обеспечения адаптивного робота состоят в обслуживании внешних по отношению к системе управления объектов: человека-оператора, приводов робота, информационной системы, технологического оборудования и вычислительного устройства верхнего уровня управления (рис.3).
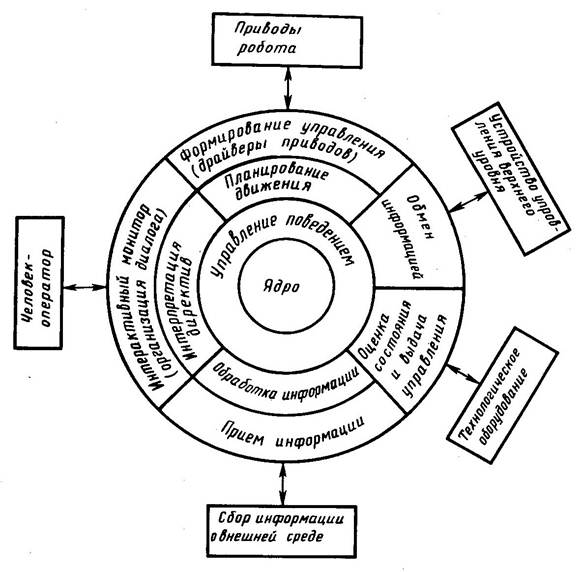
Рис.3. Структура программного обеспечения адаптивного
робота.
Система управления взаимодействует с человеком-оператором в режиме активного диалога, в процессе которого человек выполняет следующие действия:
- формирует рабочую программу, которая может быть представлена в виде набора данных, описывающих точки позиционирования захватного устройства робота и управляющие сигналы на технологическое оборудование, или в виде набора инструкций на проблемно-ориентированном языке;
- редактирует рабочую программу с помощью программы-редактора данных или редактора текста, поскольку, как было сказано выше, программа может представлять собой либо данные, либо инструкции;
- создает объектный и загрузочный модули рабочей программы, обеспечивает удаление старых файлов, включение новых, переименование и хранение программ в библиотеке;
- отлаживает рабочую программу, т.е. при поддержке программного обеспечения осуществляет ее пошаговое исполнение, анализирует результаты отладки и при удовлетворительном качестве программы дает команду на ее исполнение;
— реализует функции контроля исправности оборудования, в частности, проверяет каналы связи с технологическим оборудованием, калибрует измерительные системы робота и выполняет другие операции диагностирования.
Поняття переведення на іншу роботу
... пропонувалося ввести в законодавство різні визначення, а саме: переведення на іншу роботу, переведення на роботу з іншими істотними умовами праці, переведення на роботу в інший колектив, переведення на роботу в іншу місцевість [8,с.74]. Починаючи з 90-х років ...
Основные функции программного обеспечения
По отношению к исполнительному устройству робота – манипулятору – функции программного обеспечения широки и многообразны. В зависимости от уровня интеллекта робота они могут включать: подробный анализ задания; разбиение его на подзадачи и элементарные действия; планирование движения инструмента или захватного устройства для реализации этих действий; определение последовательности точек позиционирования, обход которых позволит воспроизвести желаемую траекторию и, наконец, преобразование координат точек позиционирования инструмента в требуемые положения сочленений манипулятора и формирование команд управления приводами.
информационного обмена
функции координации действий
С другой стороны, если существует канал связи адаптивного робота с ЭВМ верхнего уровня и процесс обмена поддерживается с двух сторон программным обеспечением, появляется уникальная возможность создания иерархии уровней управления с четким разделением задач каждого и сопутствующей унификацией программного обеспечения и языков программирования каждого.
В этом случае ЭВМ, управляющая гибким производственным модулем, который, как правило, является верхним уровнем по отношению к роботу, берет на себя координацию действий оборудования ГПМ, устранение возможности аварийных ситуаций, например столкновения манипулятора с подвижными участками других устройств или столкновения двух манипуляторов, оперирующих в одной зоне, диагностирование оборудования ГПМ и ряд других функций, осуществляемых программным обеспечением адаптивного робота при автономной работе ГПМ под его управлением.
обслуживании
Кроме перечисленных функций программное обеспечение должно решать общесистемные задачи по обработке сигналов прерываний, по управлению вводом-выводом информации, распределению вычислительных ресурсов и т.д.
Оценивая изложенные выше основные функции программного обеспечения адаптивного робота, можно заметить их сходство с функциями универсальных операционных систем реального времени. Действительно, если сравнивать основные компоненты универсальных операционных систем и систем программирования адаптивных роботов, то прослеживается их аналогия.
Система программирования адаптивного робота:
- команды оператора;
- рабочее задание;
- проблемно-ориентированный язык программирования робота;
- обслуживание внешних устройств;
- обеспечение обмена с верхним уровнем управления.
Операционная система реального времени:
- команды монитора;
- файловая система;
- языки программирования;
- управление вводом-выводом;
- поддержка сетевого обмена.
Такая аналогия позволяет при проектировании систем программирования роботов использовать опыт, накопленный не только в области теории универсальных операционных систем, но и пользоваться самими операционными системами.
Заключение
Применение в гибких производственных системах адаптивных роботов приводит к значительному повышению качества выпускаемой продукции за счет применения новых направлений в автоматизации технологических процессов, в данном случае микропроцессорных и сенсорных технологий. Применение ЭВМ для контроля процесса и самодиагностики существенно уменьшает временные затраты на наладку и обслуживание ГПМ, сводя до минимума роль «человеческого фактора» в дефектах конкретных операций и ошибках программирования робота.
Разработка программного обеспечения (2)
... Разработки Программного Обеспечения (CASE) и стандарты формата описаний, такие как Унифицированный Язык Моделирования (UML). Инженерия программного обеспечения: создание программного обеспечения с помощью языков программирования. Тестирование программного обеспечения: поиск и исправление ошибок в программе. Обслуживание программного обеспечения: программные системы ...
Список использованной литературы
[Электронный ресурс]//URL: https://inzhpro.ru/referat/programmirovanie-sistemyi-upravleniya-robota/
1. Основы робототехники / Под ред. Е.П. Попова и Г.В. Письменного. М., 1990
2. Системы очувствления и адаптивные промышленные роботы / Под ред. Е.П. Попова и В.В. Клюева. М., 1985
3. Управляющие системы промышленных роботов / Под ред. И.М. Макарова и В.А. Чиганова. М., 1984