
Графические приложения………………………………………………………86-97
В геодезии и в земельном законодательстве Российской Федерации произошли большие и коренные изменения. Пришло время говорить в геодезии о новой геодезической науке, о спутниковых геодезических системах, а в земельном законодательстве Российской Федерации, возникла острая необходимость приведения в соответствие землеустроительные и топографогеодезические документы. Выдвигается на первый план качественное и оперативное проведение картографо-геодезических работ с применением новейших геодезических приборов, таких как, GPS-приемник (Topcon HiPer+), программного обеспечения для обработки результатов измерения (Topcon Tools) и современных технологий для определения координат опорных геодезических пунктов.
Однако без создания, а в дальнейшем модернизации опорной геодезической сети (ОГС) это практически неосуществимо в силу различных причин, главной из которых является недостаточная точность координат пунктов. ОГС населенных пунктов строились в местных системах координат (в каждом своя), зачастую без строгого уравнивания. Данную проблему можно решить с помощью GPS-технологий.
Целью данной дипломной работы является исследование метода создания опорной геодезической сети с помощью спутниковой технологии на Новомихайловском месторождении нефти и газа.
Для достижения данной цели необходимо решить следующие
задачи:
- изучить виды и назначения опорных геодезических сетей;
- изучить методику создания опорной геодезической сети с помощью спутниковой технологии;
- сделать соответствующий вывод на основе рассмотренного метода.
I. Аналитический обзор
При написании дипломной работы в качестве теоретической основы были использованы следующие источники: Ширенин А. М. «Сгущение и обновление государственной сети методами спутниковой геодезии», Ефимов Г.
Н., Побединский Г. Г. «О необходимости координации работ по созданию государственной и городских геодезических сетей», «GPS. Глобальная система позиционирования» Акционерное общество «ПРИН», Назаров Н. А. «Геодезия», статьи из журнала «Геодезия и картография», Генике А. А., Побединский Г. Г., «Глобальная спутниковая система определения местоположения GPS и ее применение в геодезии», Аланд В.В., Самратов У.Д., Родионов Б.Н., Елесин Г.С. «Применеие новых методов съемок и актуальные задачи землеустройства», «Основные положения о Г осударственной геодезической сети» и другие источники.
Опорные инженерно-геодезические сети
... расширяться. При построении инженерно-геодезических сетей используются государственные опорные сети. Все геодезические сети по назначению и точности построения подразделяются на три большие группы: государственные геодезические сети (ГГС), геодезические сети сгущения (ГСС), геодезические съемочные сети. Геодезические сети представляют собой систему ...
В данной работе изложена технология создания и сгущения опорных геодезических сетей, сведения о системе GPS, методах и режимах спутниковых определений, методика создания опорной геодезической сети с помощью спутниковой технологии, новые понятия и актуальные задачи геодезии и картографии.
1.1 История развития GPS технологии.
Global Positioning System (GPS)
Разработка системы глобального позиционирования GPS началась в декабре 1973 года Военно-Воздушными Силами США. Разрабатываемая система спутниковой навигации была названа NAVSTAR (NAVigation Satellite providing Time And Range), что в переводе означает «навигационная спутниковая система, обеспечивающая измерение времени и местоположения».
Изначально GPS использовалась для высокоточного и независимого от погоды определения местоположения объектов в космосе, на суше и на море в интересах армии США. Непосредственная реализация системы началась в 1978 году с запуском первого спутника.
В то время уже существовали хорошо разработанные навигационные технологии. Попытки введения новой системы навигации подразумевали, помимо всего прочего, широкомасштабную переподготовку в войсках, что наталкивалось на консерватизм военных. Вначале командный состав ВВС просто отказывался применять GPS, ссылаясь на ее чрезмерную дороговизну.
Руководство военно-морского флота США также было против внедрения новой спутниковой навигационной программы, предпочитая довольствоваться существующими испытанными методиками. Благодаря коммерческому интересу гражданских разработчиков система стала стремительно совершенствоваться и развиваться. Здесь можно провести аналогию с Интернетом, который после передачи технологий коммерции довольно быстро завоевал весь мир.
С 1983 года система GPS открыта для использования в гражданских целях, в 1989 году был произведен запуск спутников нового поколения. Первые 11 спутников двигались по другой орбите по сравнению с современными спутниками и были предназначены для того, чтобы апробировать систему и показать реальность выполнения задачи. До 2000 года сигнал GPS, предназначенный для обычных пользователей, намеренно искажался, что вело к снижению точности (так называемый режим селективного доступа).
Историческим стало решение президента Клинтона. Он 1 мая 2000 года специальным распоряжение отменил загрубление сигналов. Ситуация изменилась разительно. Специальные режимы работы (дифференциальный, двухчастотный, фазовые измерения) позволяют получать точность намного более высокую.
С 1991 года сняты ограничения на продажу GPS-оборудования в страны бывшего СССР. В 1993 году система была полностью развернута.
По оценкам некоторых специалистов, объем продаж устройств GPS в 2008 году превысил 3 миллиарда долларов, причем всего 90 миллионов приходились на военный сектор. В настоящее время во всем мире более двухсот фирм (в частности, Magellan Systems, Motorola, Rockwell, Honeywell, и др.) выпускают сотни тысяч устройств различных классов, использующих технологию GPS, в том числе недорогие малогабаритные приборы, которые реализуют возможность применения GPS-навигации во многих областях человеческой деятельности.
Управление техническими системами Навигационные системы в автомобильной отрасли
... приемника до спутников, но и с величиной погрешности задания местоположения самих спутников. Для контроля орбит и координат спутников существуют четыре наземных станции слежения, системы связи и центр управления, ... 1995 года. В настоящий момент в работе находятся 28 спутников, равномерно распределенных по орбитам с высотой 20350 км (для полнофункциональной работы достаточно 24 спутников). Несколько ...
1.1.2. Принцип работы системы GPS.
Основу системы составляет сеть ИСЗ (искусственные спутники земли) развёрнутых в около земной орбите и равномерно «покрывающих” всю земную поверхность.
Орбиты ИСЗ рассчитаны с очень высокой степенью точности, поэтому в любой момент времени известны координаты каждого спутника. Радиопередатчик каждого из спутников непрерывно излучает сигналы в направлении Земли. Эти сигналы принимаются GPS-приемником, находящегосяся в некоторой точке земной поверхности, координаты которой нужно определить.
В GPS- приемнике измеряется время распространения сигнала от ИСЗ и вычисляется дальность «спутник-приемник”. Для вычисления этого расстояния пользуются тем свойством, что (радиосигнал распространяется со скоростью света).
Так как для определения местоположения точки нужно знать три координаты (имеются в виду плоские координаты X, Y и высоту H), то в приемнике вычисляются расстояния до трех различных ИСЗ. Очевидно, при данном методе радионавигации (он называется без запросным) точное определение времени распространения сигнала возможно лишь при наличии синхронизации временных шкал спутника и приемника. Поэтому в состав аппаратуры ИСЗ и приемника входят эталонные часы (стандарты частоты), причем точность спутникового эталона времени исключительно высока. Бортовые часы всех ИСЗ синхронизированы и привязаны к так называемому «системному времени”. Эталон времени GPS- приемника менее точен, чтобы чрезмерно не повышать его стоимость.
На практике в измерениях времени всегда присутствует ошибка, обусловленная несовпадением шкал времени ИСЗ и приемника. По этой причине в приемнике вычисляется искаженное значение дальности до спутника или «псевдодальность”. Измерения расстояний до всех ИСЗ, с которыми в данный момент работает приемник, происходит одновременно. Следовательно, для всех измерений величину временного несоответствия можно считать постоянной. С математической точки зрения это эквивалентно тому, что неизвестными являются не только координаты X,Y и H, но и поправка часов приемника D t. Для их определения необходимо выполнить измерения псевдодальностей не до трех, а до четырех спутников. В результате обработки этих измерений в приемнике вычисляются координаты (X,Y и H) и точное время.
Если приемник установлен на движущемся объекте и наряду с псевдодальностями измеряет доплеровские сдвиги частот радиосигналов, то может быть вычислена и скорость объекта. Таким образом, для выполнения необходимых навигационных расчётов точки необходимо обеспечить постоянную видимость с нее, как минимум, четырех спутников. После полного развертывания созвездия ИСЗ в любой точке Земли могут быть видны от 5 до 12 спутников в произвольный момент времени.
Современные GPS-приемники имеют от 5 до 12 каналов, т.е. они могут одновременно принимать сигналы от 5 до 12 ИСЗ. Приём сигнала более чем от четырех спутников естественно позволяют повысить точность определения координат и обеспечить непрерывность решения навигационной задачи.
1.1.3. Состав системы GPS.
В состав системы входят:
- созвездие ИСЗ (космический сегмент);
- сеть наземных станций слежения и управления (сегмент управления);
- собственно GPS- приемники (аппаратура потребителей).
3 стр., 1164 слов
Космонавтика: Система жизнеобеспечения пилотируемых космических ...
... на том, что на борту корабля специа льный приемник ловит радиоволны, по сылаемые навигационными спутниками на определенных частотах. Сигналы с приемника непрерывно поступают в компьютер. Компьютер их обрабатывает, ... координаты. Для вычисления расстояния от одного спутника до другого используют метод триангуляции (см рисунок [R1]). Этот метод впервые в космонавтике стали использовать в 1963 году в ...
Космический сигмент состоит из 24 спутников (21 основной и 3 запасных), которые вращаются на 6 орбитах. Плоскости орбит наклонены на угол около 55° к плоскости экватора и сдвинуты между собой на 60° по долготе. Радиусы орбит составляют около 26 тыс. километров, а период вращения составляет приблизительно половину звездных суток (примерно 11 ч. 58 мин.).
На борту каждого спутника имеется 4 стандарта частоты (два цезиевых и два рубидиевых — в целях резервирования), солнечные батареи, двигатели корректировки орбит, приемо-передающая аппаратура, компьютер. Вес каждого спутника около 900 кг, размер более 5 м, включая солнечные батареи.
На каждом спутнике установлены атомные часы, обеспечивающие высокую точность ( 10 -9 сек. ), вычислительно кодирующее устройство и передатчики мощностью 50 Вт и 8 Вт.
В идеале в любой момент времени любая точка Земного шара находится в зоне видимости не менее трех спутников. Спутники можно «увидеть» даже на полюсах, правда они будут находиться низко над горизонтом, что влияет на точность измерений, но несущественно.
Справедливости ради стоит отметить, что есть все же «темные» области в высоких широтах, где одновременно может быть не более 2 спутников, что не позволяет определять координаты и нарушает работу приемника GPS.
Однако такое положение дел длится лишь от 15 до 45 минут, в остальном система навигации GPS действительно глобальна.
Передающая аппаратура спутника излучает синусоидальные сигналы на двух несущих частотах: L1=1575,42 МГц и L2=1227,6 МГц. Перед этим сигналы модулируются так называемыми псевдослучайными цифровыми последовательностями (по-научному, эта процедура называется фазовой манипуляцией).
Причем частота L1 модулируется двумя видами кодов:
1).
C/A-кодом (код свободного доступа)
2).
P-кодом (код санкционированного доступа)
Частота L2- только P-кодом. Кроме того, обе несущие частоты дополнительно кодируются навигационным сообщением, в котором содержатся данные об орбитах ИСЗ, информация о параметрах атмосферы, поправки системного времени.
Кодирование излучаемого спутником радиосигнала преследует несколько целей:
- обеспечение возможности синхронизации сигналов ИСЗ и приемника;
- создание наилучших условий различения сигнала в аппаратуре приемника на фоне шумов (доказано, что псевдослучайные коды обладают такими свойствами);
- реализация режима ограниченного доступа к GPS, когда высокоточные измерения возможны лишь при санкционированном использовании системы.
Рис. 2 Кодирование радиосигнала
Код свободного доступа C/A (Coarse Acquisition) (см. рисунок 2) имеет частоту следования импульсов (иначе называемых «чипами”) 1,023 МГ ц и период повторения 0,001 сек., поэтому его декодирование в приемнике осуществляется достаточно просто. Однако точность автономных измерений расстояний с его помощью невысока.
Защищенный код P (Protected) (см. рисунок 2) характеризуется частотой следования импульсов 10,23 МГц и периодом повторения 7 суток. Кроме того, раз в неделю происходит смена этого кода на всех спутниках. Поэтому до недавнего времени измерения по P-коду могли выполнять только пользователи, получившие разрешение Министерства обороны США. Однако в мае 2000 года к P-коду получил доступ широкий круг специалистов. Американское оборонное ведомство предприняло меры дополнительной защиты P-кода: в любой момент без предупреждения может быть включен режим AS (Anti Spoofing).
Дипломный проект — Методы повышения точности GPS измерений
... GPS измерений. Им же была разработана технология кинематических измерений. Первый вид измерений стал ... кодами. Кроме излучения сигналов передатчики передают информацию о своей орбите, а так же о положении других спутников системы и параметры их орбит. Спутники имеют также приемники, которые принимают сигналы ... геодезического применения, т. е. для определения координат с высокой точностью; m = 5 мм ...
При этом выполняется дополнительное кодирование P-кода, и он превращается в Y-код. Расшифровка Y-кода возможна только аппаратно, с использованием специальной микросхемы (криптографического ключа), которая устанавливается в GPS- приемнике.
Кроме того, для снижения точности определения координат несанкционированными пользователями предусмотрен так называемый «режим выборочного доступа” SA (Selective Availability).
При включении этого режима в навигационное сообщение намеренно вводится ложная информация о поправках к системному времени и орбитах ИСЗ, что приводит к снижению точности навигационных определений примерно в 3 раза.
Поскольку P- код передается на двух частотах (L1 и L2), а C/A-код -на одной (L1), в GPS-приемниках, работающих по P-коду, частично компенсируется ошибка задержки сигнала в ионосфере, которая зависит от частоты сигнала. Точность автономного определения расстояния по P- коду примерно на порядок выше, чем по C/A-коду.
Наземный сегмент:
Состоит из главной станции управления (авиабаза Фалькон в штате Колорадо), пяти станций слежения, расположенных на территории американских военных базах расположенных на Гавайских островах, островах Вознесения, Диего — Гарсия, Кваджелейн и Колорадо- Спрингс, а также трёх станций закладок: острова Вознесения, Диего — Гарсия, Кваджелейн . Кроме того, имеется сеть государственных и частных станций слежения за ИСЗ, которые выполняют наблюдения для уточнения параметров атмосферы и траекторий движения спутников (см. рисунок 3).
Рис. 3 Сигмент оперативного контроля
Станции слежения непрерывно контролируют движение космических аппаратов и передают данные в центр управления. В центре вычисляют уточненные элементы спутниковых орбит и коэффициенты поправок шкал времени. Эти данные поступают по каналам станций связи на спутники не реже, чем один раз в сутки.
Собираемая информация обрабатывается в суперкомпьютерах и периодически передается на спутники для корректировки орбит и обновления навигационного сообщения. В аппаратуре потребителя (GPS-приемнике) принимаемый сигнал декодируется, т.е. из него выделяются кодовые последовательности C/A либо C/A и P, а также служебная информация. Полученный код сравнивается с аналогичным кодом, который генерирует сам GPS-приемник, что позволяет определить задержку распространения сигнала от спутника и таким образом вычислить псевдодальность. После захвата сигнала спутника аппаратура приемника переводится в режим слежения, т.е. в БПС поддерживается синхронизм между принимаемым и опорным сигналами. Процедура синхронизации может выполняться:
- по C/A-коду (одночастотный кодовый приемник),
- по Р — коду (двухчастотный кодовый приемник),
- по C/A-коду и фазе несущего сигнала (одночастотный фазовый приемник),
- по Р — коду и фазе несущего сигнала (двухчастотный фазовый приемник).
Используемый в GPS-приемнике способ синхронизации сигналов является едва ли не важнейшей его характеристикой.
GPS-приемник — третий сегмент системы навигации, который позиционируется и позволяет вычислять географические координаты на основе полученных данных.
Аппаратура для приёма спутниковых радиосигналов (спутниковый приёмник) состоит из следующих функциональных элементов:
1) антенны;
2) блока приёма радиосигналов;
3) микропроцессора;
4) блока управления;
5) блока индикации с дисплеем;
6) запоминающего устройства;
7) устройства связи с внешней ЭВМ;
8) блока питания.
Клавиатура блока управления и дисплей являются органами управления приёмника. В конкретных конструкциях спутниковых приёмников перечисленные элементы могут быть скомпонованы в один или несколько блоков.
Состав комплекта аппаратуры и оборудования, необходимого для выполнения полевых работ, зависит от метода спутниковых определений, способов и технологических приёмов выполнения работ и других обстоятельств.
В общем случае для полевых работ необходимо следующее:
1. Приёмник в составе блоков, содержащих функциональные элементы, и принадлежностей, необходимых для приведения его в рабочее состояние (кабелей и др.).
2. Укладочная тара для хранения и перемещения приёмника (футляр, рюкзак и т. п.).
3. Устройства для установки приёмника на точке (штатив, веха, трегер, адаптеры и т. п.).
По условиям организации работ могут быть необходимы также устройства хранения, передачи и обработки информации — PC- карты, дискеты, полевой компьютер (ноутбук), модем и принадлежности к ним, — а в необжитой местности, кроме того, — зарядное устройство и агрегат для подзарядки аккумуляторов.
1.1.4. Способы наблюдения.
Сложная структура сигнала, передаваемого от ИСЗ к приемнику, обусловила многообразие способов его обработки и наблюдений.
Кодовые наблюдения реализуются в самых простых по конструкции GPS-приемниках. Из принятого со спутника сигнала частоты L1 выделяется C/A-код (тогда приемник называется одночастотным) или из частотных сигналов L1 и L2 выделяется P-код (двухчастотный приемник).
Производится сравнение соответствующего кода с эталонным кодом, который генерирует сам приемник. Точность определения координат при этом составляет:
- для одночастотного (L1) приемника — 100м;
- для двухчастотного (L1, L2) приемника — 16м.
Значения точностей приведены для неблагоприятного режима измерений, когда включен режим «ограниченного доступа” SA.
Фазовые наблюдения выполняются для повышения точности измерений. В этом случае при сравнении принятого со спутника сигнала и его эталона, генерируемого в приемнике, учитывается не только код, но и фаза несущей частоты (L1 или L2).
Поскольку период несущей частоты в сотни (для P-кода) и тысячи (для C/A-кода) раз меньше периодов кодовых последовательностей, точность процедуры сравнения значительно повышается, а, следовательно, возрастает точность измерения координат. Однако в этом случае возникает проблема целочисленной фазовой неоднозначности, поскольку отсутствует информация о количестве целых периодов информационного сигнала, укладывающихся на пути ИСЗ — приемник. Непосредственно можно измерить только дробную часть фазовой задержки сигнала (в пределах одного периода).
Для решения этой проблемы используют несколько способов:
- классический двухэтапный метод измерений, который предполагает на первом этапе выполнение большого количества избыточных измерений, а на втором — статистический анализ полученных данных и определение наиболее вероятного значения фазовой неоднозначности;
- модификация классического метода, которая отличается тем, что при обработке результатов измерений производится многоэтапная калма-новская фильтрация и выбирается группа фильтров Калмана с оптимальными свойствами;
- метод замены антенн, когда наблюдения выполняются двумя различными приемниками на двух пунктах в две различные эпохи. При измерениях во вторую эпоху производится замена антенн приемников;
- метод определения неоднозначности «в пути”, когда для определения целого числа периодов используют линейные комбинации сигналов L1 и L2 (суммы и разности)
1.1.5.
Основные принципы работы системы ГЛОНАСС.
Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и навигационный сигнал высокой точности (ВТ) в диапазонах L1 и L2 (1,2 ГГц).
Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям на постоянной и глобальной основе и обеспечивает, при использовании приемников ГЛОНАСС возможность определения:
- горизонтальных координат с точностью 50-70 м (вероятность 99,7%);
- вертикальных координат с точностью 70 м (вероятность 99,7%);
- составляющих вектора скорости с точностью 15 см/с (вероятность 99,7%)
- точного времени с точностью 0,7 мкс (вероятность 99,7 %).
Эти точности можно значительно улучшить, если использовать дифференциальный метод навигации или дополнительные специальные методы измерений.
Сигнал ВТ предназначен, в основном, для потребителей МО РФ, и его несанкционированное использование не рекомендуется. Вопрос о предоставлении сигнала ВТ гражданским потребителям находится в стадии рассмотрения.
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. При приеме навигационных радиосигналов ГЛОНАСС приемник, используя известные радиотехнические методы, измеряет дальности до видимых спутников и измеряет скорости их движения.
Одновременно с проведением измерений в приемнике выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кепле-ровских элементов их орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными данными для решения навигационной задачи по определению координат и параметров движения.
Навигационная задача решается автоматически в вычислительном устройстве приемника, при этом используется известный метод наименьших квадратов. В результате решения определяются три координаты местоположения потребителя, скорость его движения и осуществляется привязка шкалы времени потребителя к высокоточной шкале Координированного всемирного времени (UTC).
Радионавигационное поле
Навигационные радиосигналы, излучаемые штатными НКА, образуют радионавигационное поле в околоземном пространстве.
В СРНС ГЛОНАСС каждый штатный НКА излучает навигационные радиосигналы 1600 МГц и 1250 МГц в сторону Земли с помощью передающих антенн, рабочая часть диаграммы направленности (ДН) которых имеет ширину 2ф 0 =38° и «освещает” диск Земли с избытком до высоты ho над поверхностью.
Рабочую часть ДН можно представить в виде конусного радиолуча с углом 2ф 0 при вершине. Очевидно, что
БШф o=(ho+r)/(H+r),
где r = 6400 километров — радиус Земли; H = 19100 километров — высота орбиты НКА.
Подставив ф 0 =19° , получим h0 = 2000 километров.
При полной ОГ (24 штатных НКА) радионавигационное поле на высотах h < h 0 = 2000 километров. непрерывно в пространстве, т.е. потребитель в любой точке этого пространства «освещается” радиолучами не менее чем от четырех НКА, образующих по отношению к нему удовлетворительное по геометрическому фактору созвездие для оперативного автономного определения координат и вектора скорости.
На высотах h > h 0 радионавигационное поле становится дискретным в пространстве. Космические объекты на высотах h0 < h < H «освещены” радиолучами от необходимого для оперативной навигации созвездия (не менее четырех НКА, включая НКА ниже местного горизонта) не везде, а только при нахождении в определенных областях пространства.
Космические объекты на высотах h > H (например, на геостационарной орбите) будут «освещены” на некоторых участках своей орбиты радиолучом от одного или двух НКА (при полной ОГ), и НАП может не оперативно определить орбиту космического объекта на основе обработки результатов приема навигационных радиосигналов на «освещенных” участках орбиты.
Ограничимся рассмотрением непрерывного радионавигационного поля (h < h 0 ).
Основной характеристикой радионавигационного поля для наземного потребителя являются мощности навигационного радиосигнала от око-лозенитного и пригоризонтного НКА на выходе «стандартной” приемной антенны (без учета отражений от поверхности Земли):
- P0 = P„ <3(ф ) G0(P ) X 2 /(4л: R)2 ,
где Pn _ мощность излучения передатчика; G^ ) — коэффициент направленности передающей антенны (с учетом потерь в АФУ) в направлении ф на приемную антенну; G 0 (P ) — коэффициент направленности «стандартной” приемной антенны в направлении Р на передающую антенну; X — длина волны несущего колебания радиосигнала; R — дальность от приемной антенны до передающей антенны.
В системе ГЛОНАСС передающие антенны для навигационных радиосигналов на НКА имеют круговую правую поляризацию излучения.
Коэффициент направленности G^ ) передающих антенн в рабочем секторе направлений ф < 19° относительно оси антенны составляет:
Таблица №1
|
ф , угл.град. |
0° |
15° |
19° |
|
Gfa ),дБ (1600 МГц) |
10 |
12 |
8 |
|
Gfa ),дБ (1250 МГц) |
9 |
11 |
9 |
В качестве «стандартной” приемной антенны удобно рассматривать изотропную приемную антенну с круговой поляризацией, G 0 (P ) = 1.
Дальность R от приемной антенны, размещенной на поверхности Земли, до околозенитного (Р = 90°) НКА составит
R = H = 19100 километров, до пригоризонтного (Р =5° ) НКА составит R = 24000 километров.
Бюджет мощности Р 0 узкополосных навигационных радиосигналов на выходе «стандартной” приемной антенны:
Таблица №2
|
Длина волны |
1600 МГц |
1250 МГц |
||
|
1 |
2 |
3 |
||
|
Р , угл. град. |
9 0 о |
5° |
90° |
5° |
|
Рп, дБ Вт |
+ 1 5 ± 1 |
+ 9 ± 1 |
||
|
G(9 ), дБ |
+10 |
+12 |
+9 |
+11 |
|
(X/ 4 п R) 2 , дБ |
— 182 |
— 184 |
— 180 |
— 182 |
|
G0(P ), дБ |
0 |
0 |
||
|
Б д , 0 Р 0 |
— 157± 1 |
— 157± 1 |
— 162± 1 |
— 162± 1 |
Отметим, что мощность навигационного радиосигнала, принимаемого наземным потребителем с помощью изотропной антенны, одинакова для околозенитного и пригоризонтного НКА.
Рис. 4 Структура сигнала ГЛОНАСС
Сигнал в диапазоне L1 (аналогичен C/A-коду в GPS) доступен для всех потребителей в зоне видимости КА. Сигнал в диапазоне L2 предназначен для военных нужд, и его структура не раскрывается.
Для навигационных радиосигналов ЦИ формируется на борту НКА на основе данных, передаваемых от НКУ системы на борт НКА с помощью радиотехнических средств. Передаваемая в навигационных радиосигналах ЦИ структурирована в виде строк, кадров и суперкадров.
В узкополосном навигационном радиосигнале 1600 МГц строка ЦИ имеет длительность 2 с. (вместе с МВ) и содержит 85 двоичных символов длительностью по 20 мс., передаваемых в относительном коде. Первый
символ каждой строки является начальным («холостым”) для относительного кода. Последние восемь символов в каждой строке являются проверочными символами кода Хемминга, позволяющие исправлять одиночный ошибочный символ и обнаруживать два ошибочных символа в строке. Кадр содержит 15 строк (30 с.), суперкадр 5 кадров (2,5 мин.).
В составе каждого кадра передается полный объем оперативной ЦИ и часть альманаха системы. Полный альманах передается в пределах суперкадра.
Оперативная ЦИ в кадре относится к НКА, излучающему навигационный радиосигнал, и содержит:
- признаки достоверности ЦИ в кадре;
- время начала кадра t k ;
- эфемеридную информацию — координаты и производные координат НКА в прямоугольной геоцентрической системе координат на момент времени t 0 ;
- частотно-временные поправки (ЧВП) на момент времени t 0 в виде относительной поправки к несущей частоте навигационного радиосигнала и поправки к БШВ НКА;
- время to.
Время t 0 , к которому «привязаны” ЭИ и ЧВП, кратны 30 мин от начала суток. Альманах системы содержит:
- время, к которому относится альманах;
- параметры орбиты, номер пары несущих частот и поправку к БШВ для каждого штатного НКА в ОГ (24 НКА);
- поправку к ШВ системы относительно ШВ страны, погрешность поправки не более 1 мкс.
Альманах системы необходим в НАП для планирования сеанса навигации (выбор оптимального созвездия НКА) и для приема навигационных радиосигналов в системе (прогноз доплеровского сдвига несущей частоты).
Оперативная ЦИ необходима в НАП в сеансе навигации, так как ЧВП вносятся в результаты измерений, а ЭИ используется при определении координат и вектора скорости потребителя.
В системе НАВСТАР ЦИ в узкополосных навигационных радиосигналах структурирована следующим образом: строка имеет длительность 6 с, кадр содержит 5 строк (30 с), суперкадр — 25 кадров (12,5 мин).
Узкополосные навигационные радиосигналы в системе ГЛОНАСС обеспечивают более оперативный прием (обновление) альманаха за счет более короткой длительности суперкадров (2,5 мин) по сравнению с системой НАВСТАР (12,5 мин)
1.1.6. Состав системы ГЛОНАСС
Спутник ГЛОНАСС (см. рисунок 5) конструктивно состоит из цилиндрического гермоконтейнера с приборным блоком, рамы антенно-фидерных устройств, приборов системы ориентации, панелей солнечных батарей с приводами, блока двигательной установки и жалюзи системы терморегулирования с приводами. На спутнике также установлены оптические уголковые отражатели, предназначенные для калибровки радиосигналов измерительной системы с помощью измерений дальности до спутника в оптическом диапазоне, а также для уточнения геодинамических параметров модели движения спутника. Конструктивно уголковые отражатели формируются в виде блока, постоянно отслеживающего направление на центр Земли. Площадь уголковых отражателей -0,25м 2 .
Рис. 5 Спутник ГЛОНАСС
В состав бортовой аппаратуры входят:
- навигационный комплекс;
- комплекс управления;
- система ориентации и стабилизации;
- система коррекции;
- система терморегулирования;
- система электроснабжения.
Навигационный комплекс обеспечивает функционирование спутника как элемента системы ГЛОНАСС. В состав комплекса входят: синхронизатор, формирователь навигационных радиосигналов, бортовой компьютер, приемник навигационной информации и передатчик навигационных радиосигналов.
Синхронизатор обеспечивает выдачу высокостабильных синхрочастот на бортовую аппаратуру, формирование, хранение, коррекцию и выдачу бортовой шкалы времени. Формирователь навигационных радиосигналов обеспечивает формирование псевдослучайных фазоманипулированных навигационных радиосигналов содержащих дальномерный код и навигационное сообщение.
Комплекс управления обеспечивает управление системами спутника и контролирует правильность их функционирования. В состав комплекса входят: командно-измерительная система, блок управления бортовой аппаратурой и система телеметрического контроля.
Командно-измерительная система обеспечивает измерение дальности в запросном режиме, контроль бортовой шкалы времени, управление системой по разовым командам и временным программам, запись навигационной информации в бортовой навигационный комплекс и передачу телеметрии.
Блок управления обеспечивает распределение питания на системы и приборы спутника, логическую обработку, размножение и усиление разовых команд.
Система ориентации и стабилизации обеспечивает успокоение спутника после отделения от ракеты-носителя, начальную ориентацию солнечных батарей на Солнце и продольной оси спутника на Землю, затем ориентацию продольной оси спутника на центр Земли и нацеливание солнечных батарей на Солнце, а также стабилизацию спутника в процессе коррекции орбиты. В системе используются прибор на основе инфракрасного построения местной вертикали (для ориентации на центр Земли) и прибор для ориентации на Солнце. Погрешность ориентации на центр Земли не хуже Зград., а отклонение нормали к поверхности солнечной батареи от направления на Солнце -не более 5град.
Для минимизации возмущений на движение центра масс спутника разгрузка двигателей маховиков производится с помощью магнитопровода. В качестве исполнительного органа при осуществлении успокоения и стабилизации спутника во время выдачи импульса коррекции используется двигательная установка.
Режим успокоения, в результате которого происходит гашение угловых скоростей, включается в зоне радиовидимости. В режиме начальной ориентации на Солнце осуществляется разворот спутника относительно продольной оси с помощью управляющих двигателей-маховиков до появления Солнца в поле зрения прибора ориентации на Солнце, который установлен на панели солнечных батарей.
Режим ориентации на Землю начинается из положения ориентации на Солнце путем разворота спутника с помощью двигателей-маховиков вдоль оси, ориентированной на Солнце, до появления Земли в поле зрения прибора ориентации на центр Земли. В штатном режиме обеспечивается ориентация оси спутника вместе с антеннами на центр Земли с помощью управляющих двигателей-маховиков по сигналам с приборов ориентации на центр Земли. Ориентация солнечных батарей на Солнце путем разворота спутника вместе с солнечными батареями с помощью управляющего двигателя-маховика по одному каналу и разворотов панелей батарей относительно корпуса спутника с помощью привода вращения солнечных батарей по другому каналу по сигналам приборов ориентации на Солнце. В режиме ориентации перед проведением коррекции и стабилизации спутника во время выдачи импульса коррекции отслеживание ориентации на Солнце не производится.
Система терморегулирования обеспечивает необходимый тепловой режим спутника. Регулирование тепла, отводимого из гермоконтейнера, осуществляется жалюзи, которые открывают или закрывают радиационную поверхность в зависимости от температуры газа. Отвод тепла от приборов осуществляется циркулирующим газом с помощью вентилятора.
Система электроснабжения включает солнечные батареи, аккумуляторные батареи, блок автоматики и стабилизации напряжения. Начальная мощность солнечных батарей-1600Вт, площадь-17,5м 2 . При прохождении спутником теневых участков Земли и Луны питание бортовых систем осуществляется за счет аккумуляторных батарей. Их разрядная емкость составляет 70 ампер-часов. Для обеспечения надежности на спутнике устанавливаются по два или по три комплекта основных бортовых систем. Таким образом, на спутник ГЛОНАСС возложено выполнение следующих функций:
- излучение высокостабильных радионавигационных сигналов;
- прием, хранение и передача цифровой навигационной информации;
- формирование, оцифровка и передача сигналов точного времени;
- ретрансляция или излучение сигналов для проведения траекторных измерений для контроля орбиты и определения поправок к бортовой шкале времени;
- прием и обработка разовых команд;
- прием, запоминание и выполнение временных программ управления режимами функционирования спутника на орбите;
- формирование телеметрической информации о состоянии бортовой аппаратуры и передача ее для обработки и анализа наземному комплексу управления;
- прием и выполнение кодов/команд коррекции и фазирования бортовой шкалы времени;
- формирование и передача «признака неисправности» при выходе важных контролируемых параметров за пределы нормы.

Рис. 6 Космический сегмент систем ГЛОНАСС и GPS
Рис. 7 Комплекс управления спутниками
1.2. Определение координат потребителя.
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того, чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений, и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут).
Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей модели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полёта КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задаётся узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним. В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскули-рующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе ГЛОНАСС для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации.
Как было сказано выше, для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приёмнике с точностью около 1 м. Для удобства рассмотрим простейший «плоский” случай, представленный на рисунке 8.
Рис. 8 Определение координат потребителя
Каждый спутник можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель.
Высота орбит спутников составляет порядок 20000 километров. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе.
1.2.1. Сущность абсолютных определений
Сущность спутниковой технологии развития ОГС и съёмки ситуации и рельефа состоит в использовании глобальной навигационной спутниковой системы и системы вычислительной обработки (ЭВМ и программного обеспечения) для получения координат и высот точек местности (пунктов ОГС и съёмочных пикетов).
Местоположение точки может быть получено с использованием глобальных навигационных спутниковых систем как из абсолютных, так и из относительных определений.
Абсолютные определения выполняются по принципу пространственной обратной линейной засечки, образованной измеренными псевдодальностями до 4-х и более спутников с одной точки, на которой размещён спутниковый приёмник. Точность абсолютных определений местоположения ограничена рядом факторов, среди которых основным является влияние погрешностей эфемерид спутников. Стандартная точность определения местоположения абсолютным методом не превышает 5 м, что не позволяет использовать этот метод при развитии ОГС и съёмке ситуации и рельефа, поэтому в дипломе абсолютные определения не рассматриваются.
Методы относительных определений основаны на принципе компенсации сильно коррелированных погрешностей (к которым относятся и эфе-меридные погрешности) при одновременном определении кодовых и фазовых псевдодальностей до спутников одного и того же созвездия с двух точек.
Спутниковые определения относительными методами обеспечивают определение плановых координат и высот в системе координат и высот пунктов геодезической основы.
1.2.2. Понятие о методах относительных спутниковых определений
Для реализации относительных спутниковых определений используют два или более приёмников, один из которых является базовой станцией, а другие — подвижными.
Наблюдения спутников базовой и подвижными станциями осуществляют приёмами, объединёнными в сеансы.
Различают следующие методы относительных спутниковых определений:
Дифференциальный режим
В настоящее время ведутся работы по реализации общеевропейского радионавигационного плана. Разработан специальный стандарт пересылки поправок DGPS, который называется RTCM SC — 104. Все производители GPS — приемников используют его для реализации дифференциального режима работы своей аппаратуры.
В геодезических приложениях нашли применение исключительно дифференциальные методы GPS — измерений, поскольку только с их использованием возможно определение координат точек местности с требуемой точностью.
Имеется несколько методов выполнения наблюдений. Выбор конкретного метода зависит от следующих факторов:
- требуемый уровень точности;
- технические возможности приемника и наличие соответствующего программного обеспечения;
- характер окружающей местности и метеоусловия (радиопомехи, рельеф, гроза);
- наличие ограничений на переезд между наблюдаемыми пунктами и расстояние между ними;
- конфигурация спутниковой системы и количество наблюдаемых спутников, наличие средств связи.
Для решения различных задач:
- определения точных координат отдельных точек,
- последовательных измерений местоположения множества точек,
- непрерывных координатных определений в процессе движения автомобиля и др.
- в рамках DGPS- режима разработан ряд методов выполнения измерений. Эти методы отличаются технологией выполнения работ и получаемой точностью вычисления вектора базы.
Статический метод (Static Positioning)
Название метода означает, что приемники не перемещаются в течение всего наблюдательного интервала. Базовый приемник и приемник с неизвестными координатами одновременно выполняют наблюдения и записывают данные в течение 15 минут — 3 часов. Такая длительность сессии вызвана необходимостью определения целочисленной неоднозначности фаз в начале сессии. Этому способствует и заметное изменение со временем конфигурации спутниковой системы. Одночастотные приемники используются для измерения баз длиной до 10-15 километров, а двухчастотные — для баз длиннее 15 километров (преимущества двухчастотных приемников заключаются в возможности адекватного моделирования эффекта воздействия ионосферы, а также меньшей продолжительности наблюдений для достижения заданной точности).
После завершения сеансов наблюдений данные, полученные каждым приемником, собираются вместе, вводятся в компьютер и обрабатываются с помощью специальных программ с целью определения неизвестных координат пунктов. Точность метода при использовании фазовых наблюдений:
1. Для двухчастотных приемников:
- о в плане: 5 мм + 1 мм/км * D;
- о по высоте: 10 мм + 1 мм/км * D;
2. Для одночастотных приемников:
- о в плане: 5 мм + 1 мм/км * D — (при D <
- 10 км);
- 5 мм + 2 мм/км * D
- (при D >
- 10 км);
- о по высоте: 10 мм + 2 мм/км * D).
Данный метод используют для решения задач контроля национальных и континентальных геодезических сетей, мониторинга тектонических движений земной поверхности, наблюдения за состоянием дамб, фундаментов атомных электростанций и др. сооружений.
Псевдостатический метод (Pseudo-Static Positioning)
Отличается от статического тем, что обеспечивает более высокую производительность съемки за счет выполнения наблюдений в течение нескольких коротких сессий вместо одной длинной. Один приемник непрерывно наблюдает на базовом пункте. Перевозимый приемник после наблюдений в течение 5 — 10 минут на определяемом пункте выключается и перевозится на следующий определяемый пункт, где вновь включается на 5 -10 минут. Затем вновь выключается и перевозится на следующий пункт и т.д. Каждый определяемый пункт необходимо посетить еще раз на 5 минут через 1 час после первого посещения. Этот метод практически эквивалентен статическому, но вместо того, чтобы ожидать в течение 1 часа изменения конфигурации спутников, наблюдения проводятся в течение 5 минут, а следующие 5 минут наблюдаются одним часом позже, когда конфигурация существенно изменилась. Остающиеся 55 минут можно использовать для посещения дополнительных неизвестных пунктов. Точность получаемых результатов будет на уровне статического метода. Для наблюдений могут использоваться как одночастотные, так и двухчастотные приемники. Метод удобен, когда необходимо в течение короткого времени произвести точное измерение координат большого количества точек. Недостатком метода является необходимость точного планирования графика посещения пунктов.
Быстростатический метод (Rapid Static Positioning)
Этот метод был разработан в последние годы. Он позволил значительно увеличить производительность GPS съемки. Метод отличается от псевдостатического тем, что достаточно лишь одного посещения определяемых пунктов (в течение 5-10 минут — в зависимости от расстояния между опорным и определяемым пунктами).
Поначалу, на этапе появления данного метода, для наблюдений подходили лишь двухчастотные Р- кодовые приемники. В настоящее время некоторые одночастотные приемники можно также использовать в быстростатическом режиме.
Кинематический метод «стой-иди” (Stop-and-Go Kinematic Positioning)
Метод позволяет получить положения пунктов так же быстро, как и в случае использования электронного тахеометра при решении топографических задач. Метод требует выполнения короткой процедуры инициализации с целью определения целочисленных неоднозначностей фаз. После этого опорный приемник продолжает непрерывно наблюдать на пункте с известными координатами, второй приемник перевозится (во включенном состоянии) на первый определяемый пункт, где вновь наблюдает 1 минуту. Затем он посещает все остальные определяемые пункты (лишь по одному разу).
Наиболее распространенными являются следующие процедуры инициализации:
- обмен антеннами, когда второй приемник находится на «пункте обмена” (знание его координат не обязательно), выбранном на расстоянии не более 10 метров от опорного, выполняется наблюдение 4 — 8 эпох, затем приемники переставляются (без выключения), меняясь антеннами и наблюдают 4-8 эпох (до нескольких минут), а после происходит обратная процедура обмена антеннами и выполнение наблюдений для 4-8 эпох;
- стояние второго приемника в течение 1 минуты на втором пункте с известными координатами, причем этот второй пункт может быть на расстоянии не более 10 километров от опорного пункта;
- статический метод, когда определяемый пункт выбирается на расстоянии не более 10 километров от опорного пункта, а сеанс наблюдений имеет продолжительность не менее 30 минут.
— Недостаток метода состоит в необходимости непрерывного (и даже во время движения) наблюдения не менее 4 спутников одновременно. Если число наблюдаемых спутников падает до трех хотя бы на миг, необходимо вернуться на последний успешно посещенный определяемый пункт или вновь провести процедуру инициализации. Во избежание этого лучше всего обеспечить возможность наблюдения одновременно пяти или более спутников.
Точность метода при использовании фазовых наблюдений:
1. Для двухчастотных приемников (5 спутников и две эпохи (2 сек ) наблюдений):
- о в плане: 20 мм + 1 мм/км * D;
- о по высоте: 20 мм + 2 мм/км * D;
2. Для одночастотных приемников: о в плане: 20 мм + 2 мм/км * D;
- о по высоте: 20 мм + 2 мм/км * D.
Метод эффективен при выполнении топографической съемки, когда за короткое время необходимо определить координаты большого числа точек, при построении цифровых моделей рельефа, определении местоположения объектов местности, имеющих форму ломаной линии (трубопроводы, дороги и пр.).
Кинематический метод со статической инициализацией (Kinematic with Static Initialization)
Метод очень похож на предыдущий. Точно так же на базовом пункте с известными координатами производится процедура инициализации, затем подвижный приемник перемещается в начальную точку маршрута движения и производит там наблюдения в течение нескольких минут. Далее подвижная платформа с приемником начинает движение по маршруту. GPS — измерения выполняются непрерывно во время движения с интервалом 1 сек. Точностные параметры метода те же, что и у «Stop-and-Go” Чаще всего применяется для получения координат линейных объектов типа дорог, рек и т.д.
Кинематический метод с инициализацией «на ходу” (Kinematic with On — the Fly Initialization)
Данный метод не требует для инициализации размещения подвижного приемника на базовой станции — эта процедура выполняется непосредственно при движении транспортного средства по маршруту. Кроме того, если по какой- либо причине произошел срыв наблюдений (например, из-за проезда под железнодорожным мостом), процесс инициализации производится вновь без остановки движения. Точностные параметры и сферы использования метода не отличаются от других кинематических методов.
1.2.3. Прогнозирование спутникового созвездия
Одним из этапов подготовки к проведению спутниковых определений является прогнозирование спутникового созвездия. Цель его — определение дат, моментов и интервалов времени, в которые параметры конфигурации спутникового созвездия оптимальны для спутниковых определений.
Исходными данными для прогнозирования спутникового созвездия являются координаты объекта работ и эфемеридная информация о спутниках. В случае, если в районе расположения пунктов геодезической основы, ОГС или топографических съёмок имеются предметы или сооружения, препятствующие прохождению радиосигналов от спутников, то в качестве исходной информации при прогнозировании необходимо использовать также значения высот и азимутов границ нахождения препятствий.
В качестве исходных координат объекта работ используют географические координаты, взятые с точностью до 1°.
Эфемеридную информацию в виде файла, называемого в эксплуатационной документации альманахом, получают либо из специально для этого выполняемых спутниковых определений, либо используют эфемеридную информацию, образовавшуюся в процессе каких-либо ранее выполненных спутниковых определений. В любом случае спутниковые определения для получения альманаха должны быть выполнены в дату, отстоящую не более чем на 30 суток от даты, на которую выполняют прогнозирование. Если для получения альманаха специально проводят спутниковые определения, то их выполняют одним приёмником в течение 5 минут.
Для объекта работ или его части, где препятствия прохождению радиосигналов, передаваемых спутниками, отсутствуют, прогнозирование выполняют сразу для всех пунктов и снимаемых участков объекта.
В случае, если на объекте работ препятствия имеются, прогнозирование должно быть выполнено с учётом этого обстоятельства. Оно должно быть осуществлено в отдельности для каждого пункта, если выполняют подготовку к производству работ по развитию ОГС, или в отдельности для каждого участка съёмки, в пределах которого условия прохождения радиосигналов можно принять одинаковыми, если производят подготовку к выполнению съёмки. При этом используют высоту и азимут объектов, препятствующих прохождению радиосигналов от спутников, определённые в ходе рекогносцировки.
Прогнозирование спутникового созвездия выполняют на ЭВМ с помощью программного пакета, входящего в комплект спутниковой аппаратуры, как описано в прилагаемой эксплуатационной документации.
При прогнозировании для каждого пункта геодезической основы или ОГС или участка съёмки в функции времени суток получают график числа доступных для наблюдения спутников и график значений PDOP (GDOP), на каждую дату предстоящих работ. Данная информация выводится на дисплей ЭВМ или может быть напечатана как в графической форме, так и в форме таблиц. Кроме того, может быть составлена диаграмма видимых положений спутников на небесной сфере в некоторый задаваемый интервал времени.
По полученным графикам и таблицам находят периоды, оптимальные для наблюдения спутников на пунктах геодезической основы или ОГС или участках съёмки, которые используются для планирования сеансов наблюдений.
1.2.4. Источники ошибок.
[Электронный ресурс]//URL: https://inzhpro.ru/diplomnaya/sputnikovyie-tehnologii-v-geodezii/
На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна.
- Неточное определение времени. При всей точности временных эталонов ИСЗ существует некоторая погрешность шкалы времени аппаратуры спутника. Она приводит к возникновению систематической ошибки определения координат около 0.6 м.
- Ошибки вычисления орбит.
Появляются вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в аппаратуре приемника. Эта погрешность также носит систематический характер и приводит к ошибке измерения координат около 0.6 м.
— Инструментальная ошибка приемника. Обусловлена, прежде всего, наличием шумов в электронном тракте приемника. Отношение сигнал/шум приемника определяет точность процедуры сравнения принятого от ИСЗ и опорного сигналов, т.е. погрешность вычисления псевдодальности. Наличие данной погрешности приводит к возникновению координатной ошибки порядка 1.2 м.
— Многопутность распространения сигнала. Появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. При этом возникает явление интерференции, и измеренное расстояние оказывается больше действительного. Аналитически данную погрешность оценить достаточно трудно, а наилучшим способом борьбы с нею считается рациональное размещение антенны приемника относительно пре-
пятствий. В результате воздействия этого фактора ошибка определения псевдодальности может увеличиться на 2.0 м.
— Ионосферные задержки сигнала. Ионосфера — это ионизированный атмосферный слой в диапазоне высот 50 — 500 километров, который содержит свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала. Для компенсации возникающей при этом ошибки определения псевдодальности используется метод двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках).
Линейные комбинации двухчастотных измерений не содержат ионосферных погрешностей первого порядка. Кроме того, для частичной компенсации этой погрешности может быть использована модель коррекции, которая аналитически рассчитывается с использованием информации, содержащейся в навигационном сообщении. При этом величина остаточной немоделируемой ионосферной задержки может вызывать погрешность определения псевдодальности около 10 м.
рис. 9 Тропосферные задержки сигнала
Свой негативный вклад, приводящий к ошибкам в измерении дальности, вносят ионосфера и тропосфера Земли
Тропосфера — самый нижний от земной поверхности слой атмосферы (до высоты 8 — 13 километров).
Она также обуславливает задержку распространения радиосигнала от спутника. Величина задержки зависит от метеопараметров (давления, температуры, влажности), а также от высоты спутника над горизонтом.
Компенсация тропосферных задержек производится путем расчета математической модели этого слоя атмосферы. Необходимые для этого коэффициенты содержатся в навигационном сообщении. Тропосферные задержки вызывают ошибки измерения псевдодальностей в 1 м.
— Геометрическое расположение спутников. При вычислении суммарной ошибки необходимо еще учесть взаимное положение потребителя и спутников рабочего созвездия. Для этого вводится специальный коэффициент геометрического ухудшения точности PDOP (Position Dilution Of Precision), на который необходимо умножить все перечисленные выше ошибки, чтобы получить результирующую ошибку. Величина коэффициента PDOP зависит от взаимного расположения спутников и приемника. Она обратно пропорциональна объему фигуры, которая будет образована, если провести единичные векторы от приемника к спутникам. Большое значение PDOP говорит о неудачном расположении ИСЗ и большой величине ошибки. Типичное среднее значение PDOP колеблется от 4 до 6.
К факторам, влияющим на прохождение радиосигнала, относятся механические препятствия, отражающие объекты, радиопомехи.
Препятствия, такие как здания и сооружения, густая растительность и крупные предметы, при их нахождении на прямой, соединяющей спутник и приёмник (независимо от продолжительности нахождения), исключают возможность наблюдения этого спутника. Линии электропередач, провода и кабели диаметром до 2 — 3 см. не являются препятствиями для прохождения радиосигнала.
Объекты, отражающие радиосигнал, находящиеся вблизи приёмника (на расстояниях менее 50 м.), в большей или меньшей степени, в зависимости от расстояния и площади поверхности объекта, создают эффект многопутно-сти, понижающий точность спутниковых определений. К таким объектам относятся искусственные сооружения и крупные предметы, особенно металлические. Во избежание появления эффекта многопутности в процессе работ
необходимо следить, чтобы точки ОГС не попадали в зоны, близкие к крупным металлическим объектам (опорам высоковольтных линий электропередач, нефтеналивным бакам и т. п.).
Влияние многопутности на точность спутниковых определений обычно незначительно для точностей, реализуемых при развитии ОГС и съёмке ситуации и рельефа, и, таким образом, не исключает возможности проведения этих работ.
Радиопомехи, создаваемые источниками радиосигналов (мощными радиостанциями), находящимися на расстоянии менее 1 километра от приёмника, а также подвесными высоковольтными линиями электропередач, находящимися на расстоянии менее 50 м от приёмника, понижают точность спутниковых определений. Необходимо избегать размещения спутниковых приёмников вблизи этих объектов
При выполнении спутниковых определений не рекомендуется наблюдать спутники, возвышение которых над горизонтом составляет менее 15°, т.к. в противном случае полученные данные будут значительно искажаться влиянием атмосферной рефракции.
1.3 . Основные технические требования, предъявляемые к приёмникам, используемым для развития ОГС и съёмки ситуации и рельефа
Приёмники, предназначаемые для производства работ по развитию ОГС и съёмке ситуации и рельефа, должны быть сертифицированы для геодезического применения в Российской Федерации и иметь свидетельства о поверке. Поверку необходимо выполнять ежегодно перед выездом на полевые работы. Ответственными за проведение сертификации и получение свидетельства о поверке являются метрологические службы предприятий и организаций, выполняющих съёмочные работы.
Приёмники должны соответствовать следующим техническим требованиям:
1) Должно иметься не менее 6 каналов приёма радиосигналов.
2) Должна быть обеспечена возможность измерения фазы несущего радиосигнала.
3) Встроенное программное обеспечение должно поддерживать необходимые для работы методы спутниковых определений.
4) Во время наблюдения спутников должна обеспечиваться возможность получения и вывода на дисплей следующей основной информации:
- числа наблюдаемых спутников;
- числа эпох наблюдений;
- значения фактора PDOP (или GDOP);
- сообщения о потере связи.
5) Должна быть обеспечена возможность ввода, хранения и вывода в ЭВМ семантической информации.
6) В комплект приёмника должен входить программный пакет для ЭВМ, обеспечивающий вычислительную обработку,
7) Входящий в комплект приёмника программный пакет для ЭВМ должен обеспечивать прогнозирование спутникового созвездия.
1.3.1. Порядок проверки готовности аппаратуры и исполнителей к проведению работ на объекте
Перед выездом на пункты наблюдений необходимо проверить комплектность каждой станции, работоспособность отдельных компонентов. Механические узлы станций должны работать исправно, устройства принудительного центрирования не должны иметь механических дефектов, ведущих к срыву наблюдений. Загрузочный тест блока управления должен проходить без сбоев. Регистрирующие устройства (карточки памяти, полевые компьютеры) должны иметь достаточный объем памяти для регистрации наблюдений требуемой продолжительности. Аккумуляторы должны быть в исправном состоянии и подготовлены к проведению наблюдений требуемой продолжительности с учетом температуры окружающей среды.
Создаются (формируются) и записываются в память блока управления единые для всех станций рабочие установки (параметры наблюдений):
- режим наблюдений;
- маска по углу возвышения;
- параметры сбора данных;
- частота регистрации данных.
К производству полевых работ, как правило, допускаются лица, прошедшие курс обучения работе с приёмниками того типа, который предполагается применять для спутниковых определений.
Перед выездом на полевые работы с целью освоения технологии и обеспечения надёжности проведения работ рекомендуется выполнять пробные спутниковые определения в следующих случаях:
1) если приёмник данного типа или метод спутниковых определений используется исполнителем работ впервые;
2) если техническим проектом предусмотрено выполнение спутниковых определений при таких расстояниях между базовой и подвижной станциями, которые ранее не реализовывались спутниковой аппаратурой данного типа или данным исполнителем;
3) если приёмник данного типа применяется впервые при данном характере местности или если исполнитель впервые производит спутниковые наблюдения в окружении препятствий, характерных для данной местности;
4) если приёмник данного типа применяется впервые или если исполнитель впервые производит спутниковые наблюдения в реализуемой по техническому проекту организационной структуре.
Пробные спутниковые определения необходимо выполнять теми же методам и, по возможности, в тех же условиях, что и на предполагаемом объекте работ.
По окончании пробных спутниковых определений составляется акт о готовности аппаратуры и исполнителей к производству работ.
1.3.2. Общие указания по выполнению спутниковых определений
В продолжение приёма необходимо непрерывно наблюдать как базовой, так и подвижной станциями не менее 4 спутников одновременно; при применении динамических методов и особенно кинематического метода, рекомендуется наблюдать не менее чем 5 спутников. Состав спутников в продолжение приёма может меняться.
При выборе значения интервала регистрации необходимо руководствоваться эксплуатационной документацией используемого типа приёмника с учётом применяемого метода спутниковых определений. Значение интервала регистрации должно быть одинаковым для всех приёмников, используемых в сеансе.
Высоту антенны необходимо определять на каждом пункте и пикете. При этом следует руководствоваться эксплуатационной документацией комплекта приёмника. Во избежание ошибок, рекомендуется производить измерения в метрической мере и в дюймах.
При работе со спутниковой аппаратурой необходимо соблюдать следующие правила:
1. Следить за индицируемым на дисплее значением свободного объёма запоминающего устройства приёмника и вовремя принимать меры по передаче накопившейся информации в ЭВМ.
2. Во избежание утраты данных спутниковых определений, по окончании каждого рабочего дня копировать полученные данные на дискету (PC-карту).
3. Всегда отражать в полевом журнале (или его электронном аналоге) ход выполнения работ: время начала и конца приёма, инициализации, потери связи и т. п.
4. Не допускать образования толстого снежного покрова на поверхности антенны приёмника и её обледенения.
5. Беречь антенну от попадания разряда молнии.
6. По окончании рабочего дня упаковывать комплект спутниковой аппаратуры в транспортировочные ящики во избежание механических повреждений или воздействия метеофакторов.
1.3.3. Порядок производства полевых работ и общие рекомендации по вычислительной обработке результатов наблюдений спутников
Полевым работам по развитию ОГС с применением спутниковой технологии должна предшествовать подготовка.
Полевые работы следует производить в соответствии с техническим проектом, разработанным с учётом указаний, по рабочей программе полевых работ, откорректированной по результатам рекогносцировки. При этом должны быть реализованы как метод развития ОГС, предусмотренный проектом, так и методы спутниковых определений: быстрый статический, метод реоккупации или статический: указанные в рабочей программе полевых работ для тех или иных сеансов.
Укрупнёно полевые работы на объекте складываются из доставки приёмников и оборудования на пункты и выполнения сеансов в соответствии с программой полевых работ. При этом, реализуя быстрый статический и статический методы спутниковых определений, на каждом пункте необходимо выполнить один приём, а реализуя метод реоккупации — два приёма с интервалом от 1 до 4 часов.
В сеансе для осуществления приёма на каждом пункте необходимо выполнить следующие операции, и руководствуясь эксплуатационной документацией применяемого типа приёмника:
1. Провести развёртывание аппаратуры, установить приёмник на пункте и определить высоту антенны.
2. Подготовить приёмник к работе, как указано в эксплуатационной документации.
3. Установить режим регистрации данных наблюдения спутников.
4. Пользуясь клавиатурой, ввести в запоминающее устройство: значение номера пункта, значение высоты антенны и вспомогательную информацию: время начала и конца приёма, потерь связи и др.
5. Провести приём наблюдений спутников в течение времени, указанного в рабочей программе полевых работ для применяемого метода спутниковых определений.
6. Выключить режим регистрации данных и выполнить свёртывание аппаратуры.
В заключение работ на объекте следует выполнить вычислительную обработку данных наблюдений спутников.
Вычислительная обработка производится по следующим этапам:
- предварительная обработка — разрешение неоднозначностей фазовых псевдодальностей до наблюдаемых спутников, получение координат определяемых точек в системе координат глобальной навигационной спутниковой системы и оценка точности;
- трансформация координат в принятую систему координат;
- уравнивание геодезических построений и оценка точности.
В качестве программного обеспечения для производства вычислительной обработки следует использовать программные пакеты, прилагаемые к спутниковой аппаратуре, применявшейся для производства полевых работ. Примером таких наиболее распространённых программных пакетов является Topcon Tools.
Программное обеспечение Topcon Tools компании Topcon предназначено для обработки и уравнивания наблюдений, полученных различными геодезическими приборами. представляет собой интегрированный пакет, состоящий из нескольких модулей: GPS PP; RTK; Complete; GIS; TS; Adv; GPS PP+Advanced; Design; Complete (PP, RTK, TS, Adv).
Программа Topcon Tools разрабатывалась таким образом, чтобы упростить основные операции по обработке и уравниванию полевых наблюдений, что особенно важно как для опытных, так и для только начинающих геодезистов.
Программа легко устанавливается на любой персональный компьютер, совместима с различными операционными системами Windows. Для работы с лицензионной версией используется USB-ключ аппаратной защиты или код активации связанный с аппаратной частью персонального компьютера.
Программа имеет удобный пользовательский интерфейс, который легко изучить и использовать, позволяет обрабатывать данные, полученные со всех ГНСС приемников Topcon, а также данные с приемников иных производителей, при условии конвертирования файлов наблюдений в формат RINEX. Все данные в программе хранятся в виде проектов, настройки любого проекта легко изменить, добавив или удалив необходимую информацию.
Пользователю предложен большой выбор систем координат, возможность создавать свои и вычислять параметры местной системы координат по измерениям на пунктах с известными координатами (2D и 3D калибровки), с последующим их сохранением. Имеется большой выбор форматов для импорта и экспорта данных. Предусмотрен импорт и экспорт из/в геодезические инструменты. Импорт файлов возможен по принципу drag&drop, т.е. файл достаточно перетащить в окно программы из проводника.
Данные загружаемые в программу могут быть отображены в следующем виде:
- таблицы, который включает подробную информацию по точкам, измерениям и результатам их обработки, уравнивания, а так же другую информацию
- карты, который включает графическое отображение выполненых измерений
- сеансов ГНСС наблюдений на точках, который включает графическое отоб
ражение сеансов наблюдений, с указанием информации по каждому наблюдаемому спутнику
- CAD, который включает отображение координатной сетки, настройки картографической подложки и выбора подписей для точек.
Одной из отличительных особенностей программы является функция просмотра результатов наблюдений в Google Earth. Пользователю достаточно создать проект, загрузить файлы наблюдений в него и нажав одну лишь кнопку, программа автоматически покажет место съемки в Google.
В Topcon Tools можно создавать свои и редактировать существующие шаблоны отчетной документации, с указанием необходимого перечня данных входящих в них.
Программа построена по модульному принципу, каждый модуль может быть заказан отдельно. Таким образом, пользователю предоставляется мощный и надежный рабочий инструмент, который может быть сконфигурирован им в соответствии с текущими задачами.
Рис. 10 Возможности Topcon Tools
Функции программных модулей:
Модуль GPS PP (Postprocessing) — содержит математический аппарат для обработки и уравнивания измерений полученных ГНСС приемниками.
В данном модуле имеются следующие возможности:
- Импорт сырых данных с приемников Topcon и Sokkia^ также файлов в формате RINEX
- Обработка сырых измерений полученных ГНСС приемниками по всем частотам
- Уравнивание координат точек
- Автоматическая отбраковка измерений при уравнивании
- Просмотр сеансов наблюдений и возможность их редактирования
- Поверка на замыкание полигонов
- Расчет обратной геодезической задачи
- Вывод отчетов с возможностью настройки их содержания.
Модуль RTK предназначен для обработки данных полученных в программном обеспечении контроллера при RTK измерениях.
- Импорт данных RTK измерений с контроллеров Topcon и Sokkia^ также
файлов в различных форматах.
- Расчет координат точек
- Уравнивание координат точек
- Автоматическая отбраковка измерений при уравнивании
- Поверка на замыкание полигонов
- Расчет обратной геодезической задачи
- Вывод отчетов с возможностью настройки их содержания.
Модуль complete (PP, RTK, TS) — включает в себя три модуля -Postprocessing, RTK, Total Station, для полноценной обработки ГНСС данных, а также данных полученных электронными тахеометрами. Приобретая данный модуль, пользователю предоставляется мощный, надежный и гибкий инструмент для работы, позволяющий пройти полный цикл, начиная от обработки результатов полевых измерений, до получения конечной отчетной документации.
Модуль GIS — менее точная, менее сложная версия модуля Postprocessing для обработки данных, полученных при съемки в режиме DGPS.
Несмотря на свою упрощенность, данный модуль содержит следующие возможности:
- Импорт данных наблюдений с приемников Topcon, а также файлов в формате RINEX
- Просмотр данных съемки в различных видах: вид карты, таблицы
- Просмотр сеансов наблюдений на точках стояния и возможность их редактирования
- Добавление информации по кодам и слоям
- Просмотр данных наблюдений в GoogleEarth
- Обработка сырых измерений DGPS наблюдений
- Экспорт полученных данных в различных форматах
- Расчет обратной геодезической задачи
- Вывод отчетов с возможностью настройки их содержания.
Модуль TS — это модуль, предназначенный для обработки полевых измерений, полученных электронными и роботизированными тахеометрами, а также цифровыми нивелирами.
В модуле TS пользователь имеет возможность:
- Импорт данных полевых измерений с тахеометров и цифровых нивелиров Topcon и Sokkia
- Просмотр результатов полевых наблюдений в различных видах (вид карты, вид CAD, таблицы), а также в GoogleEarth
- Работа с системами координат (выбор системы координат из списка, создание новых систем координат, используя параметры перехода)
- Создание списка кодов и слоев, и распределение информации данных полевых измерений в соответствии с ними
- Ввод параметров уравнивания и уравнивание полевых измерений
- Экспорт результатов в различных форматах
- Решение обратной геодезической задачи — расчет прямого и обратного азимутов, расстояний
- Вывод отчетов/ведомостей по результатам обработки с возможностью настройки их содержания.
Модуль Advanced — модуль расширенной обработки, дает возможность установить дополнительные параметры для обработки ГНСС измерений и уравнивания. При обработке спутниковых измерений можно выбрать необходимый алгоритм обработки, исходя из особенностей измерений, выполненных в статическом, кинематическом Stop-Go или непрерывном кинематическом режимах (обработка данных только на частоте L1, только на частоте L2, совместная обработка L1+L2, обработка только кодовых измерений и т.д., совместная обработка данных GPS и ГЛОНАСС или только GPS), появляется возможность использования параметров тропосферы и возможность разбиения/объединения нескольких сеансов наблюдений. При уравнивании пользователю предоставляется возможность выбора типа уравнивания, назначения весов исходным пунктам, возможность уравнивания 1D — только по высоте, 2D — только в плане, 3D — по высоте и в плане. Данный модуль работает только в сочетании с модулем GPS PP.
Для производства вычислений необходимо использовать IBM-совместимые ЭВМ, технические характеристики которых удовлетворяют требованиям, изложенным в эксплуатационной документации, прилагаемой к программному пакету.
При осуществлении вычислительных работ в качестве руководства должна использоваться эксплуатационная документация, прилагаемая к каждому программному пакету.
1.4. Опорная геодезическая сеть
Основные положения об опорной геодезической сети регламентируют работы по их созданию как геодезических сетей специального назначения Росземкадастра для ведения государственного земельного кадастра, мониторинга земель и землеустройства.
Опорные геодезические сети (ОГС) создаются во всех случаях, когда точность и плотность государственных, городских или иных геодезических сетей не соответствует требованиям настоящих Основных положений.
Основные положения определяют статус, назначение, структуру и технические характеристики ОГС. Создание ОГС ориентировано в основном на применение спутниковых методов определения координат. Координаты пунктов ОГС могут определяться с помощью современных геодезических и фотограмметрических методов на основе новейших технологий. Основные положения обязательны к применению при разработке нормативно -технических документов, соответствующих инструкций и руководств по созданию и развитию опорных геодезических сетей на территории Российской Федерации.
1.4.1. Статус и назначение опорной геодезической сети.
— Опорная геодезическая сеть (ОГС) является геодезической сетью специального назначения, создаваемой для координатного обеспечения государственного земельного кадастра, мониторинга земель, землеустройства и других мероприятий по управлению земельным фондом России.
- Создание опорной геодезической сети является компетенцией Федеральной службы земельного кадастра России.
- Работы по созданию опорной геодезической сети выполняется физическими и юридическими лицами, получившими в установленном порядке лицензии Росземкадастра на данный вид работ.
- Государственный надзор за работами по созданию ОГС осуществляют Федеральная служба земельного кадастра и ее территориальные органы.
- Опорная геодезическая сеть предназначена для:
1. Установления координатной основы на территориях кадастровых округов, районов, кварталов;
2. Ведения государственного реестра земель кадастрового округа, района, квартала и дежурных кадастровых карт (планов);
3. Проведения работ по государственному земельному кадастру, землеустройству, межеванию земельных участков, мониторингу земель и координатного обеспечения иных государственных кадастров;
4. Государственного контроля за состоянием, использованием и охраной земель:
5. Проектирования и организации выполнения природоохранных, почвозащитных и восстановительных мероприятий, а также мероприятий по сохранению природных ландшафтов и особо ценных земель;
6. Установления границ земель особо подверженных геологическим и техногенным воздействиям;
7. Информационного обеспечения государственного земельного ка
дастра данными о количественных и качественных характеристиках и местоположении земель для установления их цены, платы за пользование, экономического стимулирования и рационального землепользования;
8. Инвентаризации земель различного целевого назначения:
9. Решения других задач государственного земельного кадастра, мониторинга земель и землеустройства.
1.4.2. Классификация опорной геодезической сети и ее точность.
Согласно принципу перехода «от общего к частному» вся опорная сеть подразделяется на классы и построение ее осуществляется несколькими ступенями: от сетей высшего класса к низшему, от крупных и точных геометрических построений к более мелким и менее точным. Пункты высших классов располагаются на больших (до нескольких десятков км) расстояниях друг от друга и затем последовательно сгущаются путем развития между ними сетей более низких классов. Такой подход позволяет в сжатые сроки с высокой точностью распространить единую систему координат на всю территорию страны.
Различают плановые геодезические сети, в которых для каждого пункта определяются прямоугольные координаты (х, у) в общегосударственной системе, и высотные, в которых высоты (Н) пунктов определяются в Балтийской системе высот.
Геодезические сети России принято подразделять на государственную геодезическую сеть, геодезические сети сгущения и съемочные геодезические сети. Густота геодезических сетей и необходимая точность нахождения планового положения пункта определяется характером научных и инженерно-технических задач, решаемых на этой основе. Поэтому для обеспечения требуемой точности построения геодезических сетей угловые и линейные измерения ее элементов должны выполняться соответствующими приборами и методами.
1.4.3. Построение опорной геодезической сети.
Опорная геодезическая сеть — это геодезическая сеть заданного класса (разряда) точности, которая строится в процессе инженерных изысканий и служит геодезической основой для обоснования проектной подготовки строительства, выполнения топографических съемок и аналитических определений положения точек местности и сооружений. Кроме того, для планировки местности, создания разбивочной основы для строительства, обеспечения других видов изысканий, а также выполнения стационарных геодезических работ и исследований.
Геодезические работы по построению опорных геодезических сетей встречаются достаточно часто. Такие сети создаются для последующей топографической съемки территории (съемочное обоснование), для наблюдения за деформациями различных сооружений и для выполнения землеустроительных (опорные геодезические сети) или геодезических разбивочных работ. При строительстве крупных промышленных предприятий опорные геодезические сети могут создаваться в виде сетки квадратов со сторонами в 100 и 200 метров.
Геодезические сети могут создаваться как в результате проведения спутниковых геодезических работ, так и проложением полигонометрических ходов, в которых измеряются углы и расстояния. Отметки пунктов геодезических сетей определяются, как правило, методами геометрического и тригонометрического нивелирования.
Опорная геодезическая сеть должна проектироваться и создаваться с учетом ее последующего использования при геодезическом обеспечении строительства и эксплуатации объекта. В геодезии плотность пунктов опорной сети при производстве инженерных изысканий устанавливается в программе изысканий из расчета не менее четырех пунктов на один квадратный километр на застроенных территориях или один пункт на один квадратный километр на незастроенных территориях. Точки геодезической опорной сети надежно закрепляются на местности.
Плановое положение пунктов опорной сети при инженерных изысканиях определяется методами триангуляции, полигонометрии, трилатерации, построения линейно-угловых сетей, а также на основе использования спутниковой геодезической аппаратуры.
Высотная опорная геодезическая сеть на территории проведения инженерно-геодезических изысканий развивается в виде сетей нивелирования
II, III и IV классов, а также технического нивелирования в зависимости от площади и характера объекта строительства. Исходными пунктами в геодезии для развития высотной опорной сети являются пункты государственной нивелирной сети.
По результатам геодезических измерений производят расчёт плановых координат точек сети и их высотных отметок. Предельная погрешность взаимного планового положения смежных пунктов опорной геодезической сети после выполнения полевых геодезических работ и ее уравнивания не должна превышать заданных значений. Создаются каталоги координат и высот пунктов сети для дальнейшего использования. Геодезические услуги по созданию сетей специального назначения требуют высокой квалификации персонала. Расценки на геодезические работы по созданию опорных сетей зависят от размеров создаваемой геодезической сети, местоположения объекта и режима его работы.
1.4.4. Геодезические системы координат и проекция.
Для решения многих задач гораздо удобнее и практичнее перейти от геодезических координат В и L к системе плоских прямоугольных геодезических координат X, Y. При этом должна быть обеспечена однозначная связь геодезических и плоских прямоугольных геодезических координат точек (в дальнейшем плоских прямоугольных координат).
Указанной цели достигают, если поверхность общего земного эллипсоида (референц-эллипсоида) изобразить на плоскости по соответствующим математическим правилам, которые образуют так называемые «картографические проекции».
Аналитически картографические проекции описывают соответствующими математическими уравнениями, позволяющими определить по геодезическим координатам точки (В, L) ее плоские прямоугольные координаты (Х, Y) в соответствующей картографической проекции. Отметим важное обстоятельство — отобразить поверхность эллипсоида на плоскости без искажений невозможно. По характеру искажений картографические проекции могут быть равноугольными, равновеликими и произвольными.
Основное условие равноугольного отображения поверхности эллипсоида на плоскости — подобие бесконечно малых фигур, что обуславливает отсутствие при переходе от поверхности эллипсоида на плоскость искажений углов малых геометрических фигур. В равновеликих картографических проекциях отношение соответствующих площадей геометрических фигур сохраняется постоянным.
На практике удобно, чтобы меридианы и параллели на картах представляли собой прямые линии. Для этого при преобразовании на плоскость поверхности эллипсоида (шара) используют цилиндрические картографические проекции.
В Российской Федерации для перехода от геодезических координат (В, L) к плоским прямоугольным геодезическим координатам (X, Y) используют поперечную цилиндрическую равноугольную картографическую проекцию, получившую название «проекция Гаусса—Крюгера», а соответствующую ей систему координат называют государственной. Она разработана исходя из следующих условий:
- проекция сохраняет равенство соответствующих горизонтальных углов на поверхности эллипсоида и на плоскости;
- бесконечно малый контур на эллипсоиде изображается подобным ему контуром на плоскости;
- масштаб изображения в каждой точке проекции зависит только от ее координат и не зависит от направления;
- при использовании проекции земной эллипсоид разделяется меридианами на зоны, имеющие свое начало координат — пересечение осевого меридиана с экватором;
- масштаб проекции вдоль осевого (среднего) меридиана зоны равен единице, т.
е. его изображают без искажения.
Осевой меридиан зоны и экватор изображают на плоскости двумя взаимно перпендикулярными линиями.
Принцип построения картографической проекции Гаусса— Крюгера показан на рисунке. Как отмечалось ранее, при использовании проекции Г аусса—Крюгера в основу положено разделение поверхности общего земного эллипсоида на ряд одинаковых меридианных полос с заданной разностью долгот 6° граничных меридианов. Изображение на плоскости каждой шестиградусной полосы представляет собой колонну листов Международной карты мира в масштабе 1 : 1 000 000. Шестиградусная полоса в свою очередь является шестиградусной координатной зоной, ограниченной изображениями соответствующих меридианов. В зоне с номером n кривые PQP 1 и PQ P1 являются граничными меридианами 6° зоны; пунктирная линия — осевой меридиан, долгота которого L0 = 6°n — 3°. Эта зона на плоскости изображена в проекции. Кривые pqp1 и pq’p1 — изображения граничных меридианов; прямая рр1 — изображение осевого меридиана, а прямая qq ’— изображение экватора. Прямолинейное изображение осевого меридиана и экватора на плр-скости позволяет их использовать в качестве осей плоской прямоугольной системы координат. Ось ординат У направлена на восток и совмещена с изображением линии экватора, а ось абсцисс X совмещена с изображением линии осевого меридиана зоны и направлена на север. Если а — изображение точки А на плоскости, то ее положение определяется плоскими прямоугольными координатами ха и уа .
Каждую шестиградусную зону нумеруют арабскими цифрами. На территории Российской Федерации принята нумерация зон, отличающаяся от нумерации зон мировой карты масштаба 1 : 1 000 000 на тридцать единиц, т. е. крайняя западная зона с долготой L 0 осевого меридиана, равной 21°, имеет номер 4, а к востоку номера зон возрастают (до 32-й на Чукотке).
Системы плоских прямоугольных геодезических координат каждой координатной зоны совершенно идентичны. Из этого следует, что плоские прямоугольные координаты Х и Y, вычисленные по геодезическим координатам В и L, в любой координатной зоне имеют одни и те же значения. Данное обстоятельство обусловлено тем, что проекция Гаусса—Крюгера является симметричной относительно оси абсцисс. При этом абсциссы точек, имеющих одинаковую широту, являются функциями не долгот, а разностей между ними и значением долготы осевого меридиана. Две точки в А и В с одинаковой широтой и с одинаковой разностью долгот относительно осевых меридианов соответствующих зон после их изображения на плоскости имеют одинаковые абсциссу и абсолютное значение ординаты.
Чтобы исключить из обращения отрицательные ординаты и облегчить использование плоских прямоугольных координат, ко всем ординатам добавляют постоянное число 500000 м. Кроме того, чтобы знать, к какой координатной зоне относятся плоские прямоугольные координаты точки, к ординате слева приписывают номер зоны. В результате получают число, представляющее собой условную ординату. Например, условная ордината точки, равная 21 349 821, 425 м, означает, что точка с этой ординатой расположена в 21 зоне, ее действительная ордината —150178,575 м, а долгота осевого меридиана зоны L 0 = 6°
- 21 — 3° = 123°.
Ввиду обособленности систем координат каждой зоны возникают некоторые неудобства в местах их стыковки. В этих случаях доя описания положения точек используют системы координат обеих смежных зон.
Положение точки Р, расположенной на одном и том же граничном меридиане двух смежных координатных зон, показано на рисунке. Допустим, что ее геодезические координаты равны соответственно В Р и LP . После изображения данной точки на плоскости ее плоские прямоугольные координаты в системе координат первой зоны будут XP1 и YP1 . Эта же точка во второй системе будет иметь координаты ХР2 и YP2 . Примем, что координаты ХР1 и YP1 известны и требуется вычислить координаты точки Р в системе координат второй зоны, это часто требуется на практике. Переход от системы координат с одним осевым меридианом к системе координат с другим осевым меридианом называют «переходом из зоны в зону». В общем случае его осуществляют в такой последовательности. Вначале по известным плоским прямоугольным координатам ХР1 и YP1 вычисляют геодезические координаты B Р1 и LР1 . Затем с учетом разности долгот осевых меридианов соответствующих зон, используя найденные геодезические координаты, вновь определя
ют плоские прямоугольные координаты Х Р2 и YP2 точки Р, но во второй, т. е. «левой» зоне.
1.4.5. Математическая обработка геодезических измерений
- Программу математической обработки результатов геодезических измерений регламентируют соответствующие руководства и инструкции.
— Математическая обработка результатов геодезических измерений должна сопровождаться оценкой их точности. Значения средних квадратических ошибок элементов ОГС, вычисленные по результатам уравнивания, должны соответствовать их классификационным значениям, установленным для каждого класса настоящими основными положениями.
Предварительная (математическая) обработка — математическая обработка геодезических измерений, связанная с проверкой качества и получением первичной информации по результатам геодезических измерений на отдельных пунктах геодезических построений.
Уравнительные вычисления — комплекс вычислительных работ, проводимых с целью уравнивания и оценки точности результатов измерений.
Уравнивание геодезических измерений — математическая обработка результатов геодезических измерений, выполняемая с целью нахождения оптимальных оценок измеренных величин и их функций для устранения несогласованности между результатами измерений.
Уравненное значение — оценка искомой геодезической величины, полученная из уравнивания.
Поправка из уравнивания — разность между уравненным и измеренным значением результатов измерений.
Невязка (w) — Разность между значением функции, вычисленным по результатам измерений, и истинным ее значением.
Вес результата измерений (p) — относительная характеристика точности результата геодезических измерений, обратно пропорциональная дисперсии результата измерений.
Обратный вес результата измерений (Q) — относительная характеристика точности результата геодезических измерений, обратная его весу.
1.4.6. Составление каталогов (списков) координат пунктов ОГС в написание технического отчета.
- Каталоги координат пунктов ОГС Составляются в местной системе координат и границах кадастрового округа Российской Федерации.
- Каталог координат пунктов ОГС ведется в установленном порядке, как правило, в электронном виде.
- В каталоге координат для каждого пункта OMС указывается его номер, название, класс, плоские прямоугольные координаты и высоты пунктов ОГС.
- Каталоги координат пунктов ОГС составляются и издаются в установленном порядке. Составление, ведение, издание и хранение каталогов координат пунктов ОГС является исключительной компетенцией Росземка-дастра.
- Порядок составления, ведения, издания н хранения каталогов пунктов ОГС в местных системах координат определяет Росземкадастр по согласованию с Минобороны РФ.
- Номер пункта ОГС устанавливается в границах кадастрового округа РФ в порядке возрастания.
- Название пункту ОГС присваивается по названию ближайшего населенного пункта или географического объекта.
- Тип знака и центра пункта ОГС записывается в соответствии с требованиями основных положений.
- Плоские прямоугольные координаты и высоты пунктов ОГС округляются до 0,01 метра. Высоты пунктов ОГС, определенные геометрическим нивелированием.
- Технический отчет составляется в соответствии с техническим заданием на выполнение работ.
Каталог координат пунктов опорной геодезической сети
Таблица 3
|
Имя |
Карт.Х (м) |
Карт. Y (м) |
Высота (м) |
|
Михайловский |
5932270.480 |
9599736.440 |
197.100 |
|
Наумовка Зап. |
5938143.870 |
9603418.620 |
142.919 |
|
Родник |
5931300.640 |
9605425.720 |
184.278 |
1.4.7. Виды знаков опорной геодезической сети (ОГС).
Пункты ОГС должны быть закреплены на местности знаками, обеспечивающими долговременную сохранность пунктов и временными знаками, с расчётом на сохранность точек на время съёмочных работ.
При закреплении пунктов ОГС знаками долговременного типа надлежит руководствоваться следующим:
1. В качестве знаков долговременного типа применяют:
- бетонный пилон размерами 12 X 12 X 90 см, в верхний конец которого заделан кованый гвоздь, а в нижнюю часть для лучшего скрепления с грунтом вцементированы два металлических штыря (рис. 11);
Рис. 11 Бетонный пилон
- бетонный монолит в виде усечённой четырёхгранной пирамиды с нижним основанием 15×15 см, верхним 10 X 10 см и высотой 90 см, с заделанным в него кованым гвоздём (рис. 12);
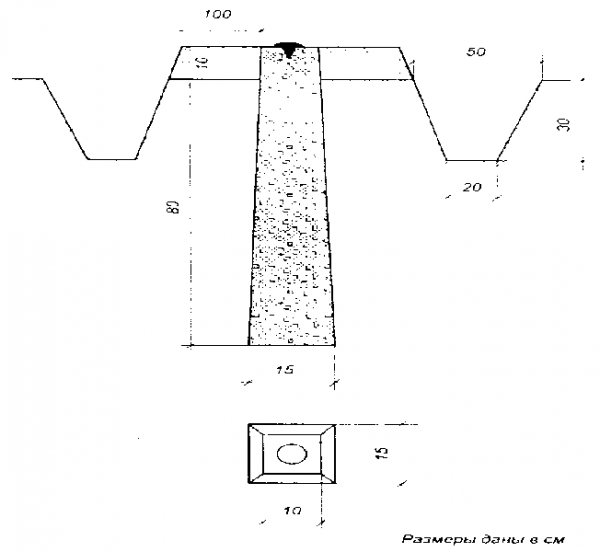
Рис. 12 Бетонный монолит
- стальная труба диаметром 35-60 мм, отрезок рельса или уголкового стального профиля 50 X 50 X 5 мм (либо 35 X 35 X 4 мм) длиной 100 см с железобетонным якорем внизу и металлической пластиной для надписи вверху;
- якорь выполнен как скреплённая с трубой (рельсом, уголком) стальная арматура,
2. Знаки долговременного типа должны быть окопаны канавой в виде квадрата со стороной 1,5 м, глубиной 0,3 м, шириной 0,2 м в нижней части и
0,5 м в верхней части. Вокруг знака должна быть сделана насыпь грунта высотой 0,10 м. В районах болот, залесённой местности и многолетней мерзлоты насыпь заменяют срубом (1,0 X 1,0 X 0,3 м), заполненным грунтом. При этом знак не окапывают.
3. Во всех случаях знаки долговременного типа устанавливают в местах, обеспечивающих их сохранность, технику безопасности и удобство использования при топографической съёмке, изысканиях и строительстве, а также при последующей эксплуатации построенного объекта. Не разрешается производить закладку долговременных знаков на пахотных землях и болотах, проезжей части дорог, вблизи размываемых бровок русел рек и берегов водохранилищ и в других местах, где может нарушиться сохранность знака и где сам знак может явиться помехой хозяйственной деятельности.
При закреплении пунктов ОГС временными знаками необходимо придерживаться следующих рекомендаций.
1. Временными знаками могут служить пни деревьев, деревянные колья диаметром 5 — 8 см, деревянные столбы или металлические трубы (уголковая сталь), забитые в грунт на 0,4 — 0,6 м, с установленными рядом сторожками, либо нанесённый краской крест на валуне. Временные знаки окапывают канавой по окружности диаметром 0,8 м.
2. Центр временного знака обозначают гвоздём, вбитым в верхний срез кола (столба) или насечкой на металле. В залесённой местности для
облегчения нахождения знака в случае необходимости делают отметки на деревьях краской.
Каждому знаку ОГС присваивают порядковый номер с таким расчётом, чтобы на объекте не было знаков с одинаковыми номерами.
При включении в состав ОГС знаков, принадлежащих ранее созданным геодезическим построениям, номера этих знаков изменять не разрешается.
На долговременных знаках масляной краской, а на временных — пикетажным карандашом — пишут: сокращённое название организации, проводящей работу, номер закреплённого пункта (точки) и год установки знака.
Пункты ОГС следует, по возможности, размещать на землях, находящихся в государственной или муниципальной собственности с учетом их доступности. В других случаях размещения пунктов ОГС необходимо письменное согласие собственника, владельца или пользователя земельным участком, на котором размещаются эти пункты. Отвод земельных участков для этих целей осуществляется в соответствии с законодательством Российской Федерации.
Пункты ОГС после закладки сдаются для наблюдения за их сохранностью по акту:
- городской, поселковой или сельской администрации, если они расположены на землях, находящихся в государственной или муниципальной собственности;
- собственнику, владельцу, пользователю земельного участка, если они находятся на его земельном участке.
Если пункт ОГС совмещен с межевым знаком, то он сдается на наблюдение за сохранностью всем собственникам, владельцам и пользователям земельных участков.
Территориальные органы осуществляют контроль за установлением и сохранностью пунктов ОГС.
1.4.8. Указания по проектированию опорной геодезической сети.
Проектирование ОГС должно производиться с учётом требований Инструкций в зависимости от масштаба и метода предстоящей съёмки. При этом должны быть также учтены специальные требования к геодезическим сетям проектных и других организаций. Основой для проектирования должны служить: сбор и анализ сведений и материалов обо всех ранее выполненных геодезических работах на объекте съёмки; изучение района предстоящих работ по имеющимся картам наиболее крупного масштаба и литературным источникам; изучение материалов проведённого специального обследования района работ, включающее обследование и инструментальный поиск геодезических знаков ранее выполненных работ; выбора наиболее целесообразного варианта развития геодезических построений с учётом перспективы развития территорий.
Графическую часть проекта ОГС составляют, как правило, на картах масштаба 1:50 000 — при проектировании съёмки масштаба 1:10000, и на картах масштаба 1:10 000 и 1:25 000 — при проектировании крупномасштабных съёмок.
В процессе проектировочных работ необходимо выполнить общие требования по проектированию, ряд нижеследующих специфических требований, относящихся к применению спутниковой аппаратуры для создания ОГС:
1. Определить тип и эксплуатационные характеристики спутниковой аппаратуры, которую надлежит использовать для производства работ.
2. В соответствии с заданным масштабом съёмки и высотой сечения рельефа выбрать метод спутниковых определений и метод развития ОГС.
3. Выбрать по материалам топографо-геодезической изученности объекта работ пункты геодезической основы для развития ОГС.
4. Составить проект ОГС, удовлетворив требования по беспрепятственному и помехоустойчивому прохождению радиосигналов.
5. Подготовить рабочую программу полевых работ по развитию ОГС с применением спутниковой технологии, если проектируют развитие ОГС, методом построения сети, если развитие ОГС планируют выполнить методом определения висячих пунктов.
6. Уточнить рабочую программу полевых работ по результатам рекогносцировки.
7. Запланировать проверку готовности аппаратуры и исполнителей к проведению работ на объекте.
8. Дать общие указания по выполнению спутниковых определений.
9. Запланировать проведение вычислительной обработки результатов наблюдений спутников.
Геодезическая основа, используемая для развития ОГС и съёмки ситуации и рельефа посредством спутниковых определений, должна удовлетворять требованиям по беспрепятственному и помехоустойчивому прохождению радиосигналов.
В случае, если на объекте предполагается проведение съёмки ситуации и рельефа с применением спутниковой технологии, создания геодезических сетей сгущения, ОГС и её сгущения не требуется, поскольку методы спутниковых определений по дальности и точности принципиально обеспечивают возможность проведения съёмочных работ непосредственно на основе государственной геодезической и нивелирной сети. При этом на пунктах этой сети должны отсутствовать факторы, понижающие точность спутниковых определений.
В качестве исходных пунктов, от которых развивается ОГС (далее -исходных пунктов) следует использовать все пункты геодезической основы, не менее 4 пунктов с известными плановыми координатами и не менее 5 пунктов с известными высотами, так чтобы обеспечить приведение ОГС в систему координат и высот пунктов геодезической основы.
Для развития ОГС с использованием спутниковой технологии, в зависимости от проектируемого масштаба съёмки и высоты сечения рельефа, следует применять один из двух методов — метод построения сети или метод определения висячих пунктов.
При проектировании ОГС для съёмки конкретного объекта в требуемом масштабе с заданной высотой сечения рельефа необходимо выбрать метод спутниковых определений — статический, быстрый статический или метод реоккупации.
Указания по выбору метода развития ОГС и метода спутниковых определений в зависимости от масштаба съёмки и высоты сечения рельефа содержатся в таблице 4.
1. Метод развития ОГС определением висячих пунктов рекомендовано применять при подготовке съёмочной геодезической основы относительно мелких масштабов с высотами сечения рельефа 1 м, 2 м и более, то есть в тех случаях, когда не требуется получение материалов высокой точности.
2. Метод развития ОГС построением сети рекомендован к применению для получения наиболее точных плановых координат и высот пунктов, необходимых при производстве съёмок наиболее крупных масштабов со всеми регламентированными значениями высоты сечения рельефа.
3. Быстрый статический метод спутниковых определений при производстве работ по развитию ОГС является основным. Он позволяет производить определение плановых координат пунктов и их высоты с достаточной точностью и высокой оперативностью для большей части масштабного ряда и высот сечения рельефа.
4. Метод псевдостатический заменяет быстрый статический метод в тех случаях, когда по условиям проведения работ выгодно осуществить два кратковременных приёма наблюдений спутников, разнесённых во времени, вместо одного длительного приёма.
5. Статический метод спутниковых определений из-за сравнительно невысокой оперативности выполнения работ может быть применён в тех случаях, когда при высоте сечения рельефа 0,5 м. технико-экономически целесообразно для получения высотной съёмочной основы проводить не нивелирные работы, а спутниковые определения.
Рекомендации по применению методов развития ОГС и методов спутниковых определений для различных масштабов съёмки и высот сечения рельефа:
Таблица 4
|
Масштаб съёмки; высота сечения рельефа |
Плановое обоснование |
Планово-высотное или высотное обоснование |
||
|
Метод развития ОГС с использованием спутниковой технологии |
Метод спутниковых определений |
Метод развития ОГС с использованием спутниковой технологии |
Метод спутнико вых определе ний |
|
|
1 |
2 |
3 |
4 |
5 |
|
1:10000, 1:5 000; 1м |
Определение висячих пунктов |
Быстрый статический или реоккупация |
Построение сети |
Быстрый статический или реоккупация |
|
1:2 000, 1:1000, 1:500; 1 м и более |
Построение сети |
Быстрый статический или реоккупация |
Построение сети |
Быстрый статический или реоккупация |
|
1:5000; 0,5 м |
Определение висячих пунктов |
Быстрый статиче- скийили реоккупация |
Построение сети |
Статиче ский |
|
1:2 000, 1:1 000, 1:500; 0,5 м |
Построение сети |
Быстрый статический или реоккупация |
Построение сети |
Статиче ский |
Рабочая программа полевых работ по развитию ОГС с применением спутниковой технологии должна в своей основе представлять перечень сеансов, каждый из которых включает приёмы, выполняемые на пунктах объекта работ. Рабочая программа полевых работ должна включать следующие данные:
1. Название объекта работ.
2. Вид развиваемой ОГС (плановая, высотная или планово-высотная).
3. Масштаб и высоты сечения рельефа проектируемых съёмочных
работ.
4. Перечень используемой аппаратуры и программного обеспечения.
5. Применяемые методы спутниковых определении.
6. Значения продолжительности приёма для планируемых к применению методов спутниковых определений и различного числа наблюдаемых спутников.
7. Значения интервала регистрации данных наблюдений спутников для планируемых к применению методов спутниковых определений.
8. Указания по порядку ведения полевых работ на объекте методами спутниковых определений, включающие:
- номера сеансов;
- номера приёмников, используемых на тех или иных пунктах геодезической основы или ОГС для выполнения приёма, с указанием названий
этих пунктов и пометкой номеров приёмников, принимаемых в сеансах в качестве базовых станций;
- методы спутниковых определений, применяемые для выполнения тех или иных сеансов.
При проектировании развития ОГС методом построения сети программа полевых работ на объекте должна быть составлена так, чтобы все линии сети были определены независимо друг от друга, включая линии, опирающиеся на пункты геодезической основы. При этом необходимо запроектировать определение линий от каждого вновь определяемого пункта ОГС не менее чем до 3 пунктов.
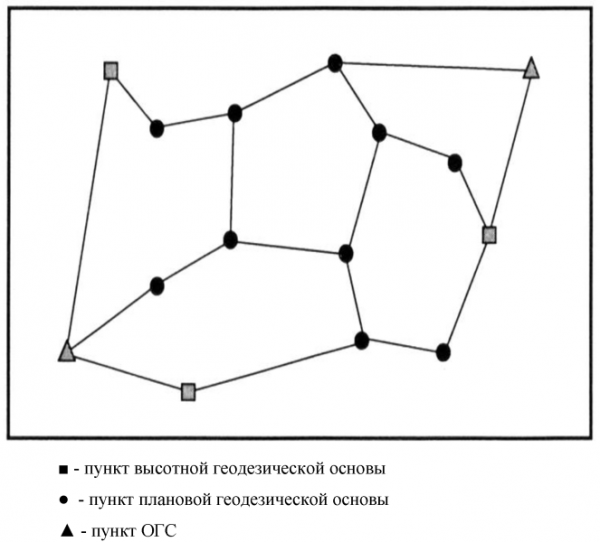
Рис. 13 Пример схемы развития ОГС методом построения сети
В случае проектирования применения 2-х приёмников для наблюдений спутников выполнение указания не вызывает затруднений. Однако, если на объекте планируют использование более 2-х приёмников, и проектируют ведение работ сеансами, включающими наблюдения на 3-х и более пунктах, то при составлении программы полевых работ необходимо намечать для каждого сеанса в качестве независимо определяемых линий такие линии, ломаная из соединения которых не пересекает сама себя в точках соединения линий и не замыкается.
В качестве примера на рисунке 14 показана схема, иллюстрирующая проект независимого определения 3-х линий из сеанса, выполняемого на 4-х пунктах. Как видно на рисунке 16, ломаная, составленная из линий 1-2,2-3,34 не пересекает сама себя в точках соединения линий и не замыкается. Для независимого определения линий 1-3,1-4,2-4 необходимо выполнить ещё один сеанс на этих пунктах. Как видно на рисунке, и в этом случае ломаная из соединения этих линий не пересекает сама себя в точках соединения линий и не замыкается.
Рисунок 14. Схема, иллюстрирующая проект независимого определения 3-х линий из сеанса, выполняемого на 4-х пунктах.
При планировании развития ОГС методом определения висячих пунктов необходимо запроектировать определение линий от каждого пункта ОГС до ближайшего к ней пункта геодезической основы, а также между соседними пунктами геодезической основы (как показано на рисунке 17а), либо, если это целесообразно, необходимо запроектировать определение линий от пунктов ОГС до нескольких ближайших пунктов геодезической основы (рисунок 17 б, в), получая таким образом засечки. При этом во всех случаях геодезическое построение должно включать необходимое количество пунктов геодезической основы.
При проектировании вычислительной обработки результатов наблюдений спутников предусматривают применение IBM-совместимых ЭВМ и использование специализированных программных пакетов, входящих в комплекты запланированной для использования спутниковой аппаратуры. Работа с этими пакетами должна проектироваться в соответствии с требованиями по их применению, изложенными в прилагаемой к ним эксплуатационной документации. Тип программного обеспечения должен указываться в рабочей программе полевых работ.
Рис. 15 Схемы, иллюстрирующие проект развития ОГС методом определения висячих пунктов
III Экспериментальная часть
Опорные геодезические сети (ОГС) всегда развивались локально, хотя формально требовалось в качестве исходных использовать пункты государственной геодезической сети (ГГС) в системе координат 1956 года (СК— 33).
Во избежание переноса деформаций СК—33 на внутреннюю структуру городской сети это требование часто игнорировалось. Иногда деформации компенсировались посредством изменения масштаба в ключах связи местной и государственной систем координат.
Применение спутниковой аппаратуры и электронных тахеометров для определения взаимного положения объектов предусматривает однозначный подход к созданию координатной основы. Местные системы координат вполне удовлетворительно «справляются» с линейно-угловыми искажениями элементов сети при переходе со сферы на плоскость. Но распространять их за рамки населенных пунктов нецелесообразно, так как это приведет к потере основного преимущества локальных систем — максимальной приближенности размеров объектов на плане и земной поверхности с учетом масштаба. Для большего соответствия размеров изображение проектируют на поверхность местного референц-эллипсоида. Поэтому встает вопрос о необходимости разработки методики взаимоувязывания местных систем между собой в рамках определенного региона. Это возможно при условии надежной привязки местных систем к пунктам ГГС в СК—33, и лучше это делать при создании ОГС населенных пунктов.
Точность взаимного положения смежных пунктов ГГС в СК—33 составляет 3—5 см. Это вполне удовлетворяет требованиям к точности координатной основы, предъявляемым при создании ОГС. По мере необходимости внутри ГГС могут создаваться локальные сети, которые улучшат как конфигурацию сети в целом, так и ее точность.
К картографированию территорий, расположенных за границами населенного пункта, предъявляются более низкие требования, чем для населенного пункта. Поэтому в качестве картографической основы здесь можно использовать координаты пунктов ГГС в соответствующей МСК, полученные по координатам в СК—33.
Вовремя прохождения преддипломной практики бригадой из 3 человек включая меня была создана опорная геодезическая сеть на Новомихайловском месторождении нефти и газа .. Данная работа выполнялась на основе спутниковых технологий в 2011 году ОАО «НИПИнефть». Опорная геодезическая сеть состоит из 3 основных пунктов. По результатам уравнивания средние квадратические погрешности определения координат пунктов составили 3—11 мм. После математической обработки разрозненных спутниковых сетей и устранения систематических расхождений согласованная спутниковая сеть стала опорной для последующих геодезических работ. Ниже представлена таблица точности положения пунктов и схема их расположения.
Точность положения пунктов
Таблица 5
|
Имя |
dN (м) |
dE (м) |
dH (м) |
Точность в плане (м) |
Точность по высоте (м) |
|
0001-Михайловский |
-2726.837 |
-2490.592 |
68.897 |
0.004 |
0.008 |
|
0001-Наумовка Зап. |
3146.535 |
1191.418 |
14.718 |
0.005 |
0.008 |
|
0001-Родник |
-3696.783 |
3198.722 |
56.098 |
0.008 |
0.011 |
|
0002-Михайловский |
-2314.505 |
-2079.353 |
57.120 |
0.004 |
0.006 |
|
0002-Наумовка Зап. |
3558.872 |
1602.654 |
2.926 |
0.005 |
0.007 |
|
0002-Родник |
-3284.442 |
3609.966 |
44.299 |
0.014 |
0.017 |
|
0003-Михайловский |
-1502.015 |
-1499.320 |
45.279 |
0.005 |
0.007 |
|
0003-Наумовка Зап. |
4371.367 |
2182.691 |
-8.897 |
0.003 |
0.004 |
|
0003-Родник |
-2472.017 |
4189.998 |
32.413 |
0.014 |
0.017 |
|
0004-Михайловский |
-2341.116 |
-2962.133 |
77.105 |
0.004 |
0.005 |
|
0004-Наумовка Зап. |
3532.257 |
719.876 |
22.938 |
0.004 |
0.006 |
|
0004-Родник |
-3311.056 |
2727.190 |
64.277 |
0.008 |
0.017 |
|
0005-Михайловский |
-1825.367 |
-2268.773 |
76.410 |
0.002 |
0.004 |
|
0005-Наумовка Зап. |
4048.005 |
1413.233 |
22.230 |
0.004 |
0.007 |
|
0005-Родник |
-2795.316 |
3420.543 |
63.568 |
0.005 |
0.010 |
|
Михайловский-Наумовка Зап. |
5873.376 |
3682.008 |
-54.183 |
0.003 |
0.004 |
|
Михайловский-Родник |
-969.944 |
5689.321 |
-12.820 |
0.003 |
0.005 |
|
Наумовка Зап.-Родник |
-6843.319 |
2007.314 |
41.365 |
0.003 |
0.005 |
Так как пунктов ОГС расположенных на Новомихайловском месторождении нефти и газа первоначально было слишком мало, то встал вопрос, об определении дополнительных пунктов таким образом, чтобы несколько из них оказались на территории самого месторождения или в непосредственной близости от него. Причем для определения таких опорных пунктов использовались существующие пункты государственной геодезической сети 3—4 классов. Число их зависит от территории района и его конфигурации, но в любом случае их должно быть не менее трех. Погрешность определения координат таких пунктов составляет порядка 0.004 — 0.0014 м. В результате была развита ОГС, число пунктов которой и схема ее расположения определены в зависимости от площади и конфигурации месторождения. При этом выполнялось следующее условие: расстояния от вновь определяемых пунктов до опорных или между определяемыми было не более 20 километров, так как в этом случае наиболее оптимально реализована инструментальная точность современных спутниковых приемников. Определяемые пункты привязывались по меньшей мере к трем пунктам опорной сети или ранее определенным.
Более конкретные условия определялись в процессе технического проектирования. При выборе пунктов тщательно изучалось их положение на местности, чтобы условия работы спутниковой аппаратуры соответствовали паспортным данным. Для контроля выполнялись повторные наблюдения в различных местах ОГС. По данным этих измерений можно судить об инструментальной точности внутри сети, причем расхождения длин линий при повторных или контрольных измерениях не должны превышать
(5 мм + 10 -6 D) Vn, где D — длина линии; n — число ее независимых измерений.
В качестве исходных, использовались пункты государственной геодезической сети: Михайловский, Наумовка Зап., Родник.
КАТАЛОГ ИСХОДНЫХ КООРДИНАТ И ВЫСОТ ПУНКТОВ ГГС
Таблица 6
|
№ по каталогу |
Название пункта |
Координаты X,Y в метрах |
Высота над уровнем моря в метрах |
Класс |
|
Пункты ГГС |
||||
|
1 |
Михайловский |
5932270,480 9599736,440 |
197,100 |
пир. 3 кл. |
|
2 |
Наумовка Зап. |
5938143,870 9603418,620 |
142,919 |
пир. 4 кл. |
|
3 |
Родник |
5931300,640 9605425,720 |
184,278 |
пир. 4 кл. |
Подробное местоположение опорно-геодезических знаков показано на картах. Закладка опорно-геодезических знаков планировалась таким образом, чтобы они были равномерно распределены по территории Новомихайловского месторождения с учетом особенностей развития данного месторождения и анализа существующей густоты пунктов опорно-геодезической сети.
Координаты и высоты закладываемых опорно-геодезических знаков определялись с применением современных технологий, с использованием новейшего геодезического оборудования, в частности GPS-системой Topcon HiPer+.
Пункты ГГС расположены в Бугурусланском районе следующих населенных пунктов: с. Наумовка, с. Петровка, с. Красный Пахарь, с. Поникла, с. Малое Куроедово.
Работы выполнялись в соответствии с требованиями нормативных документов: СНиП 11-02-96 и СП 11-104-97.
Наблюдения на пунктах выполнялись с помощью спутниковых прие-моиндикаторов. Измерения образовывали замкнутые фигуры. При определении пунктов использовалась двучастотная спутниковая геодезическая аппаратура фирмы Topcon HiPer+.
В качестве заложенных опорных геодезических знаков были использованы:
- бетонные пилоны размерами 10 X 10 X 90см, внутрь которых вцементированы металлические штыри.
В результате проведения описанных выше работ на территории Новомихайловского месторождения . была создана опорная геодезическая сеть пунктов со строго уравненными координатами в местной системе координат СК-56.
Заключение
В данной дипломной работе была исследована технология создания ОГС методом спутникового определения на Новомихайловском месторождении нефти и газа на практике. В процессе исследования были решены следующие задачи:
- изучены виды и назначения опорных геодезических сетей;
- исследованы возможности программы Topcon Tools.
- изучены технологии создания опорной геодезической сети методом GPS-определений.
Проведенная полевая работа удовлетворяет требованиям инструкций по созданию ОГС. Преимуществом данного метода являются: минимальные затраты времени и требуемая точность определений координат пунктов ОГС.
На основе проделанной работы можно сделать вывод, что при использовании GPS-технологий можно качественно и быстро создавать опорные геодезические сети.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ИСТОЧНИКОВ и приложений доступны в полной версии работы
Скачать дипломную работу: