
Определение местоположения на Земле было одной из важнейших задач человечества. Древние мореплаватели ориентировались по звёздам, указывающим направление движения. С появлением компаса задача существенно упростилась. Изобретение морского компаса дало мореплавателям надежное средство для ориентировки в море в любой момент дня и ночи и независимо от погоды и было необходимым шагом к эпохе великих географических открытий. Одновременно шло развитие картографии. Развитие цивилизации в XX веке потребовало более точных методов определения координат. Решение данной задачи стало результатом технического прогресса второй половины XX века.
В 1957 году в СССР группа учёных под руководством В.А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. Была установлена возможность нахождения координат приёмника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны. Положение ИСЗ в каждый момент можно вычислить на основании информации, заложенной в сигнале спутника. Пользователь, измеряя частоту пришедшего к нему сигнала, сравнивает её с эталонной и вычисляет доплеровский сдвиг частоты, обусловленный движением спутника, а затем и координаты потребителя.
В конце 50-х годов XX века в Советском Союзе проводились исследования ставшие основой для построения первой отечественной низкоорбитальной навигационной спутниковой системы «Цикада». В 1963 году начались работы по построению этой системы. В 1967 году на орбиту был выведен первый отечественный навигационный спутник «Космос-192».
Одновременно подобные работы начали проводиться и в США. В результате в 1964 году в США создаётся доплеровская спутниковая радионавигационная система первого поколения «Transit» предназначенная для навигационного обеспечение пуска с подводных лодок баллистических ракет. Для коммерческого использования система становится доступной в 1967 г.
Основной недостаток данных систем был связан с их низкоорбитальностью, и соответственно малым временем доступности системы. Поэтому в 1967 году ВМС США была разработана программа по созданию навигационной системы нового поколения. Аналогичную программу вили и ВВС США. В 1973 году две программы были объединены в одну. Результатом этих работ стало создание навигационнй системы «Navstar-GPS» или просто GPS которая была полностью развернута к 1996 году.
Организация системы управления воздушным движением
... воздушного движения (управления полетами) текущего времени. При проверках время указывается с точностью до ближайшей половины минуты. 11. Радиотелефонный позывной «контроль» Районный центр единой системы организации воздушного движения ... наличие радиообмена на подлежащей использованию частоте убедиться в отсутствии сигнала занятости наземного канала связи, чтобы исключить возможность возникновения ...
В Советском Союзе работы над аналогичной системой начались в 1976 году. В декабре 1976 года правительство СССР приняло указ о разработке второго поколения навигационных спутниковых систем — ГЛОНАСС, хотя это было лишь формальной датой появления так как первые технические предложения были выведены уже в начале 1976 года.
Эскизное проектирование длилось до 1979 года, после чего начались первые испытания. В 1982 году был запущен первый спутник системы «Космос-1413».
Развал Союза сильно затормозил этот процесс — прекратилось финансирование.
Испытания закончились в 1991 году, после чего, в 1993-м, по указу главы государства система была введена в эксплуатацию. Однако реально действующей система стала лишь с 2008 года, когда число действующих спутников ГЛОНАСС составило двадцать единиц. В это время Правительством увеличило финансирование программы, после чего на орбиту были запущены еще 9 спутников. Дальнейшие разработки направились на улучшение параметров, увеличение точности сигналов и модернизацию потребительских устройств. В 2011 году был запущен спутник «ГЛОНАСС-К» — третье поколение системы. В настоящее время это полноценно функционирующая навигационная система. Наряду с орбитальным сегментом важнейшими компонентами системы являются навигационные приемники и соответствующее программное, в том числе картографическое обеспечение.
Актуальность темы определяется значением, которое имеют навигационные системы в современном мире.
Объектом исследования в квалификационной работе являются навигационные системы.
Предметом исследования является электронные средства отображения картографической информации.
Цель данной работы — изучение общих принципов функционирования навигационных систем и навигационных приемников, вопросы организации программного обеспечения приемников, их эксплуатации и перспективы развития и модернизации.
Для решения этой цели были поставлены следующие задачи:
- изучить принцип работы навигационных систем NAVSTAR и ГЛОНАСС;
- проанализировать основные принципы работы навигационных приемников;
- рассмотреть структуру программного обеспечения приемников;
- изучение структуры программного обеспечения пользователя;
- оценить перспективы развития навигационных систем.
- сделать рекомендации об использовании различных средств работы с электронными картами.
В теоретической части работы рассматриваются принципы функционирования навигационных систем GPS NAVSTAR и ГЛОНАСС, анализируются основные типы навигационных карт и решаемые на них задачи, рассматривается структура программного обеспечения.
В практической части данной работы проводится анализ принципов функционирования различных электронных средств отображения картографической информации.
Разработка автоматизированной информационной системы работы отдела кадров (2)
... в) сложность поиска необходимой информации; Целью разработки является максимально возможное устранение случайных ошибок, перечисленных недостатков существующей системы работы отдела кадров, и привнесение в нее ... решения задач и функций управления. Темой данного курсового проекта является информационная система отдела кадров предприятия. Работа отдела кадров достаточно крупного предприятия связана с ...
В 1958-1959 гг. в Ленинградской военно-воздушной инженерной академии им. А.Ф. Можайского, Институте теоретической астрономии АН СССР, Институте электромеханики АН СССР, двух морских НИИ и Горьковском НИРФИ проводились исследования по теме «Спутник», ставшие впоследствии основой для построения первой отечественной низкоорбитальной навигационной спутниковой системы «Цикада». В 1963 году начались работы по построению этой системы. В 1967 году на орбиту был выведен первый отечественный навигационный спутник «Космос-192».
Параллельно с этим, после успешного запуска СССР первого искусственного спутника земли, в США в Лаборатории прикладной физики Университета Джона Гопкинса проводились работы по вычислением параметров движения спутника относительно наземного пункта наблюдения. На основе этих исследований в 1964 году в США создаётся доплеровская спутниковая радионавигационная система первого поколения «Transit». Основное её назначение — навигационное обеспечение пуска с подводных лодок баллистических ракет Поларис. Для коммерческого использования система становится доступной в 1967 г. Так же, как и в системе «Цикада», в системе «Transit» координаты источника вычисляются по доплеровскому сдвигу частоты сигнала одного из 7 видимых спутников.
В первых системах невозможен непрерывный режим работы. Ввиду того, что системы низкоорбитны, время, в течение которого спутник находится в поле видимости потребителя, не превышает одного часа.
Одной из основных проблем, возникающих при создании спутниковых систем, обеспечивающих навигационные определения по нескольким спутникам, является взаимная синхронизация сигналов спутников с необходимой точностью. Для этих целей в 1967 году ВМС США была разработана программа, по которой был осуществлён запуск спутника TIMATION-I, а в 1969 году — спутника TIMATION-II. В то же время, ВВС США параллельно вели свою программу по использовании широкополосных сигналов, модулированных псевдошумовым кодом (PRN).
Корреляционные свойства такого кода позволяют использовать одну частоту сигнала для всех спутников, с кодовым разделением сигналов от различных. В 1973 году в США была инициирована программа создания навигационной системы DNSS, позже переименованная в Navstar-GPS, а, затем, в GPS. Первый тестовый спутник выведен на орбиту 14 июля 1974 г. США, а последний из всех 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., таким образом, GPS встала на вооружение. Стало возможным использовать GPS для точного наведения ракет на неподвижные, а затем и на подвижные объекты в воздухе и на земле.
Первоначально глобальная система позиционирования GPS разрабатывалась как чисто военный проект. В 1983 году президент США Рональд Рейган разрешил частичное использование системы навигации для гражданских целей [2].
Во избежание применения системы для военных нужд точность была уменьшена специальным алгоритмом.
В СССР лётные испытания высокоорбитальной спутниковой навигационной системы Глонасс начались в 1982 году запуском спутника «Космос-1413». Основным разработчиком и создателем по системе в целом и по космическому сегменту является НПО прикладной механики (г. Красноярск), а по навигационным космическим аппаратам — ПО «Полёт» (г. Омск).
Повышение эффективности управления пассажирскими перевозками ...
... перевозками на основе системы ГЛОНАСС Задачи курсовой: Система ГЛОНАСС- ее разбор, плюсы и минусы работы с ней 2) Разобрать диспетчеризацию пассажиро-перевозок с проектированием этой системы. Объект исследования: Что такое система ГЛОНАСС ... без ограничений. Основой системы являются 24 спутника, движущихся над поверхностью ... ОАО Навигационно-информационные системы. В 2012 году федеральным сетевым ...
Головным разработчиком радиотехнических комплексов является РНИИКП; ответственным за создание временного комплекса, системы синхронизации и навигационной аппаратуры потребителей определён Российский институт радионавигации и времени.
Системы NAVSTAR и ГЛОНАСС концептуально аналогичны и отличаются некоторыми аспектами технической реализации. В их основе — орбитальные группировки спутников на круговых орбитах. Высота орбит такова, что спутники совершают примерно два оборота вокруг Земли в сутки. Номинально в каждый момент системы имеют 24 работающих спутника и 3 резервных.
Спутники распределены по нескольким орбитальным плоскостям — в ГЛОНАСС их 3, в NAVSTAR — 6. На каждой орбите, таким образом, находится 8 и 4 спутника, соответственно.
Для NAVSTAR плоскости орбит разнесены по прямому восхождению на 60 градусов. Наклон плоскости орбиты к плоскости экватора составляет 54°.
У NAVSTAR — высота орбиты 20150 км и период обращения 11 часов 57 минут, у ГЛОНАСС — 19100 км и 11 часов 16 минут соответственно (т.е. периоды обращения равны почти половине звездных суток).
На борту каждого спутника имеется 4 стандарта частоты (два цезиевых и два рубидиевых — для целей резервирования, их погрешность составляет 1 секунду за 160 000 лет), солнечные батареи, двигатели корректировки орбит, приемо-передающая аппаратура, компьютер.
1.2 Сетевая радионавигационная спутниковая система GPS
Американская система GPS предназначена для высокоточного определения координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Она разработана для Министерства Обороны США и находится под его управлением. GPS состоит из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Согласно интерфейсному контрольному документу, основными разработчиками системы являются [2]:
- по космическому сегменту — Rockwell International Space Division, Martin Marietta Astro Space Division;
- по сегменту управления — IBM, Federal System Company;
- по сегменту потребителей — Rockwell International, Collins Avio-nics & Communication Division.
Космический сегмент GPS на 1 мая 2012 года состоял из 31 навигационных космических аппаратов. Все они находятся на круговых орбитах с периодом обращения вокруг Земли, равным 12 часам. Высота орбиты каждого спутника равна ~ 20000 км. Функционирование на такой большой высоте позволяет сигналам покрывать большую территорию. Спутники расположены на орбитах так, что GPS навигатор на земле всегда может получать сигналы по меньшей мере от четырех из них в любое заданное время. НКА системы GPS проходили ряд усовершенствований, которые сказывались на их характеристиках в целом. В табл. 1 Приложения А приведены краткие характеристики космических аппаратов, используемых в системе.
Спутники вращаются со скоростью 7 000 миль в час, что позволяет им обходить вокруг земли каждые 12 часов. Они питаются солнечной энергией и рассчитаны приблизительно на 10 лет работы. На случай пропадания солнечной энергии у спутников есть резервные батареи. Спутники оснащены малыми реактивными двигателями, которые корректируют траекторию вращения.
Системы спутникового мониторинга Глонасс на автотранспорте
... каналам за работой бортовых систем спутников и диагностика их состояния контроль информации в навигационных сообщениях спутника, прием сигнала вызова ПКУ управление полетом спутников и работой их бортовых систем путем выдачи на спутники временных ...
Каждый спутник передает сигналы малой мощности на нескольких частотах (выделенные L1, L2 и др.).
Гражданские GPS навигаторы используют частоту L1. Сигналы проходят «линию видимости», что значит, что они пройдут через облака, стекло и пластик, но не пройдут сквозь большинство твердых объектов, таких как здания и горы.содержит два «псевдослучайных» сигнала, Защищенный (Р) код и код гражданского доступа (С/А).
Каждый спутник передает уникальный код, позволяющий GPS приемнику идентифицировать сигналы. Р-код также называют «Р(Y)» или «Y» код.
Основной целью этих закодированных сигналов является возможность вычисления времени прохождения (или времени прибытия сигнала) от спутника до GPS навигатора на земле. Время прохождения, умноженное на скорость света, равно дальности спутника. Навигационное сообщение содержит данные об орбите спутника, системном времени, общем состоянии системы, а также модель задержки сигналов в ионосфере. Спутниковые сигналы рассчитываются с использованием сверхточных атомных часов. Структура навигационных радиосигналов системы GPS показана на рисунке.
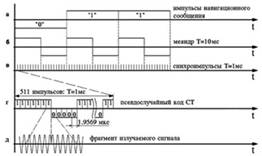
Рисунок 1 — Структура навигационных радиосигналов системы GPS
В системе GPS используется кодовое разделение сигналов (СDMA), поэтому все спутники излучают сигналы с одинаковой частотой. Каждый спутник системы GPS излучает два фазоманипулированных сигнала. Частота первого сигнала L1 составляет 1575,42 МГц, а второго — L2 — 1227,6 МГц. Сигнал несущей частоты L1 модулируется двумя двоичными последовательностями, каждая из которых образована путём суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных, формируемых со скоростью 50 бит/с. На частоте L1 передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р или засекреченного кода Y и навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/A (открытого) кода и той же последовательности навигационных данных.
Каждый спутник использует свойственные только ему дальномерные коды С/A и Р(Y), что и позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала. Структурное деление навигационной информации спутников системы GPS осуществляется на суперкадры, кадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12,5 мин).
Один кадр передаётся в течение 30 с и имеет размер 1500 бит. Кадр разделён на 5 подкадров по 300 бит и передаётся в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу/окончанию очередного 6-с интервала системного времени GPS. Подкадр состоит из 10 30-бит слов. В каждом слове 6 младших разрядов являются проверочными битами.
В 1-, 2- и 3-м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид КА, с которым установлена связь. Содержание и структура этих подкадров остаются неизменными на всех страницах суперкадра. В 4- и 5-м подкадрах содержится информация о конфигурации и состоянии всех КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее.
Спутниковая радионавигационная система
... (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута ... спутниковой системы, обеспечивающей беззапросные навигационные определения одновременно по нескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекуд), поскольку рассинхронизация излучаемых спутниками навигационных ...
1.3 Навигационная система Глонасс
Система ГЛОНАСС предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре ГЛОНАСС так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях. Разработкой аппаратов занимается ОАО «Информационные спутниковые системы» имени академика М.Ф. Решетнёва». Система также включает в себя три сегмента:
- космический сегмент, в который входит орбитальная группировка искусственных спутников Земли;
- сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
- аппаратура пользователей системы.
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км. Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут.
В таблице Приложения Б приведены сведения о космических аппаратах, используемых в системе. В Приложении В приведены сведения о космических аппаратах, используемых в системе. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.
Сегмент наземного комплекса управления системы ГЛОНАСС выполняет
- эфемеридное и частотно-временное обеспечение;
- мониторинг радионавигационного поля;
- радиотелеметрический мониторинг НКА;
- командное и программное радиоуправление НКА.
Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10-13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 1014. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3-5 нс.
Наземный сегмент обеспечивает эфемеридное обеспечение спутников. Это означает, что на земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определённый промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение, передаваемое спутником наряду с передачей навигационного сигнала. Сюда же входят частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения НКА производятся в Баллистическом центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости.
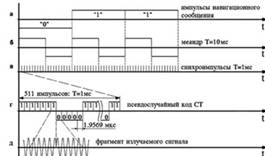
В системе Глонасс используется частотное разделение сигналов (FDMA), излучаемых каждым спутником — двух фазоманипулированных сигналов. Частота первого сигнала лежит в диапазоне L1 ~ 1600 МГц, а частота второго — в диапазоне L2 ~ 1250 МГц. Для каждого спутника рабочие частоты сигналов в диапазоне L1 и L2 когерентны и формируются от одного эталона частоты. Одна из несущих подвергается фазовой манипуляции на 180º. Модулирующий сигнал получают сложением по модулю 2 трёх двоичных сигналов (рис. 2):
- грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с;
- последовательности навигационных данных, передаваемых со скоростью 50 бит/с;
- меандрового колебания, передаваемого со скоростью 100 бит/с.
Бортовая информационно-управляющая система (БИУС) транспортного средства
... Определить перспективные направления развития БИУС. 1 Элементы системы «Бортовая информационноуправляющая система (БИУС) транспортного средства (ТС) - это ... информации с датчиков, а так же формирующие информационные сообщения и управляющие воздействия на исполнительные ... настоящее время данного стандарта промышленной сети в автомобильной технике. Цель работы: Исследовать особенности различных ...
Рисунок 2 — Структура сигнала ГЛОНАСС
Сигнал в диапазоне L1 (аналогичен C/A-коду в GPS) доступен для всех потребителей в зоне видимости КА. Сигнал в диапазоне L2 предназначен для военных нужд, и его структура не раскрывается.
Навигационное сообщение формируется в виде непрерывно следующих строк, каждая длительностью 2 с. В первой части строки (интервал 1,7 с) передаются навигационные данные, а во второй (0,3 с) — Метка Времени. Она представляет собой укороченную псевдослучайную последовательность, состоящую из 30 символов с тактовой частотой 100 бит/с.
Навигационные сообщения спутников системы Глонасс необходимы потребителям для навигационных определений и планирования сеансов связи со спутниками. По своему содержанию навигационные сообщения делятся на оперативную и неоперативную информацию. Оперативная информация относится к спутнику, из сигнала которого она была получена. К оперативной информации относят оцифровку меток времени, сдвиг шкалы времени спутника относительно шкалы системы, относительное отличие несущей частоты спутника от номинального значения, эфемеридная информация.
Неоперативная информация содержит альманах, включающий в себя данные о состоянии всех спутников системы,сдвиг шкалы времени спутника относительно шкалы системы, параметры орбит всех спутников системы, поправку к шкале времени системы Глонасс.
Выбор оптимального «созвездия» КА и прогноза доплеровского сдвига несущей частоты обеспечивается за счёт анализа альманаха системы. Навигационные сообщения спутников системы Глонасс структурированы в виде суперкадров длительностью 2,5 мин. Суперкадр состоит из пяти кадров длительностью 30 с. Каждый кадр содержит 15 строк длительностью 2 с. Из 2 с длительности строки последние 0,3 с занимает метка времени, остальная часть строки содержит символы цифровой информации, передаваемых с частотой 50 Гц.
4 Алгоритм определения координат
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того, чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут).
Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей модели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полёта КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задаётся узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним.
По географии «Системы координат в топографии и картографии.»
... По топографическим картам масштабов 1:25000 — 1:200000 географические координаты ... по результатам непосредственных измерений на местности, так и с помощью карт. К числу таких систем относятся географические, плоские прямоугольные, полярные и биполярные координаты. В системе географических координат ... карте в этой системе определяется двумя координатами: углом положения Q, который измеряется по ...
В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскулирующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе Глонасс для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации. Для определения координат потребителя необходимо знать координаты спутников и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приёмнике [4] с точностью около 1 м. Для удобства рассмотрим простейший «плоский» случай, представленный на рис. 3.

Рисунок 3 — Определение координат потребителя
Каждый спутник можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель. Высота орбит спутников составляет порядок 20000 км. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе. Спутниковые навигационные системы позволяют потребителю получить координаты с точностью порядка 10-15 м. Однако для многих задач, особенно для навигации в городах, требуется большая точность. Один из основных методов повышения точности определения местонахождения объекта основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 3 м в динамической навигационной обстановке и до 1 м — в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приёмника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приёмник. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными, опорная станция вычисляет поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
Аппаратура потребителя принимает от опорной станции дифференциальные поправки и учитывает их при определении местонахождения потребителя. Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. По экспериментальным данным, опорную станцию рекомендуется располагать не далее 500 км от объекта. В настоящее время существуют множество широкозонных, региональных и локальных дифференциальных систем.
Методы и технологии создания карт
... создания карт включает следующие этапы: 1) редакционно-подготовительные работы; 2) составление карты; 3) подготовка карты к изданию; 4) издание карты. Редакционно-технические указания к составлению карты ... указания по составлению карты; 4 - методика и технология составления карты; 5 - подготовка карты к изданию. ... на эллипсоиде Красовского. Система координат прямоугольная 1995 года. Система высот ...
5 Электронные карты
Важной частью навигационных систем являются электронные карты. В общем случае под электронной картой (ЭК) понимается изображение определенного района Земли в условном виде на экране дисплея или набор данных для построения этого изображения. При рассмотрении вопросов использования ЭК применяется их классификация по различным признакам.
В зависимости от полноты информации, представляемой на карте, ЭК разделяют на полномерные и упрощенные (стилизованные).
По нагрузке полномерные навигационные ЭК равноценны официальным бумажным навигационным картам и содержат всю картографическую информацию, необходимую для безопасного и эффективного судовождения.
Нагрузка упрощенных электронных карт недостаточна для целей безопасного плавания. Для использования полномерных карт требуются обладающие широкими возможностями средства хранения и отображения информации, которыми ряд автоматизированных навигационных систем не обладает. В таких системах могут использоваться ЭК в упрощенном виде, который позволяет реализовывать имеемая аппаратура. Схематическое изображение на экране дисплея местности в определенной проекции, не эквивалентное бумажной навигационной карте обычно называется упрощенной (стилизованной) электронной картой.
В зависимости от метода цифрового представления информации карты ЭК делят на растровые и векторные.
В растровых картах используется метод цифрового представления изображения карты в виде матрицы точек (пикселей).
При таком представлении карты сведений об отдельных картографических объектах в памяти нет. Исходной для получения данных растровых карт служит информация официальных бумажных карт. Растровые карты получаются сканированием основы и раздельно цветного изображения бумажных карт. За основу растровых ЭК приняты печатные платы для обычных бумажных карт. Снятая с основы карта является копией бумажной. Сканерная технология производства растровых карт обеспечила в начале 90-х годов быстрое производство мировой коллекции этих карт.
Растровое изображение не является картой, в том понимании, которое принято в геодезии. Изображение формируется из отдельных пикселей, упорядоченных в определенной последовательности. Изображение выглядит как картинка, но при близком рассмотрении, видно что, оно представляет из себя набор точек разных цветов. По сути, представление растрового изображения на экране компьютера является аналогом формы в которой растр сохраняется в файл на диске компьютера. Одной из форм этого типа является битовый образ (битмап) представляемый файлом с расширением .bmp. Файлы .bmp быстро отображаются на экране, но занимают больше количество памяти на диске.
Картографическое изображение включает большие участки одного фона, которые можно легко «ужать», уменьшив конечный размер файлов. Одним из наиболее популярных методов сжатия графических файлов является .gif формат. Данный формат наиболее эффективно сжимает файлы, особенно карты. Однако .gif формат запатентован и многие разработчики графических программ, не желающие вносить лицензионные платежи, используют другие, менее эффективные, методы сжатия. Одним из таких методов является .jpg. Этот формат хорошо подходит для фотографий людей и пейзажей, но менее удачен для карт, так как в процессе компрессии немного теряется четкость линий. Для решения этой проблемы, был разработан .png формат. Существуют еще методы .tif и .tiff. В принципе, метод .tiff не намного эффективнее .bmp формата, но разработаны версии сжатого .tiff, который позволяет значительно уменьшить размер файлов. Стоит учесть, что сжатый файл должен быть декодирован перед отображением на экране компьютера, и чтобы этот процесс не «нервировал» пользователя, требуется соответствующая мощность процессора. Другим известным форматом является .drg. По сути, этот тот же самый .tiff формат, но дополненный некоторой калибровочной информацией.
Растровые изображения могут использоваться как карты. Они могут содержать схематические или фотографические изображения карт, планы местности. Пользователь самостоятельно может нарисовать карту в графическом редакторе. Но во всех этих случаях, компьютер рассматривает эти картографические изображения, как обычные картинки. Дороги, дома, леса, водные массивы являются для компьютера обычным набором пискелов и ничем больше. И только пользователь, может идентифицировать их как отдельные объекты, а все изображения как карту определенной местности. Все это является большим и самым главным ограничением при использовании растров в качестве карт
Изменение масштаба растровой карты подразумевает приближение или увеличение изображения без изменения информации. Увеличенное изображение представляет из себя приближенную картинку. Есть программы, которые при изменении масштаба, заменяют текущую карту другой картой, более или менее детальной. Такой метод требует подготовки набора карт одного региона в различных масштабах, соответственно, значительно увеличивается количество файлов и их общий размер памяти. При достижении границ карты, программа должна самостоятельно или с вручную, с помощью пользователя, переключаться на соседний лист. Можно объединить листы соседних регионов единое изображение и использовать для перемещения по карте полосы прокрутки, но работа с объектами на карте уже будет менее удобной
Программы для работы с растровыми картами обычно поставляются без карт. Если в инсталляционном комплекте и содержатся карты, то обычно это либо базовая карта мира, либо карты какой-нибудь, не относящейся к пользователю, местности. Под свои задачи, пользователь должен создавать или находить карты самостоятельно. Можно сканировать бумажные оригиналы карт, скачивать их из Интернета, покупать на дисках. Большинство программ поддерживает карты, представленные в различных графических форматах.
Для использования с GPS приемниками, одного изображения карты недостаточно, необходимо его калибровать. Это связано с тем, что по сути, плоская карта является проекцией изогнутой земной поверхности. «Изогнутость» тем больше, чем больше площадь территории охваченной на карте. Дополнительные сдвиги могут возникнуть в процессе сканирования, либо оригинал карты сдвинут на некоторый угол относительно севера.
Минимальную калибровку карты можно произвести с помощью двух точек расположенных на противоположных краях изображения. Предполагается что изображение карты линейно и не содержит искажений. Калибровка позволяет интерпретировать положение на карте выраженное в пикселях в значения широты и долготы. И соответственно, обратный процесс — геодезические GPS координаты переводятся в пиксельные размеры и отображаются на карте.
Из наиболее популярных навигационных программных продуктов, использующихся для работы с растровыми картами, стоит выделить OziExplorer.
В состав пакета входит OziExplorer — программный продукт используемый для работы с растровыми картами и поддерживающий обмен навигационными данными с GPS навигаторами производства Magellan, Garmin, Lowrance и Eagle. OziExplorer устанавливается и работает на персональном компьютере с операционными системами Windows.
Эта программа позволяет пользователю сохранять точки, маршруты и треки из GPS на ПК, накладывать их на карту, отмечать на карте новые точки, маршруты и треки, и переносить их в GPS. OziExplorer способен работать с любой растровой картой, в том числе, отсканированной пользователем. Такую карту необходимо привязать к реальным координатам по нескольким точкам. Основные функции программы:
- сканирование и калибровка карт и схем пользователя;
- использование карт в различных форматах (BSB, Maptech, USGS DRG);
- поддержка большинства GPS приёмников;
- Поддерживается обмен событиями с GPS навигаторами Lowrance/Eagle;
- поддержка более 100 датумов;
- поддержка множества форматов сетки, включая UTM, BNG, IG, Swiss, Swedish, NZG и другие;
- поддержка множества картографических проекций;
- печать карт и списка точек.
Вторая программа пакета это OziExplorer CE. Она является навигационным программным обеспечением для мобильных систем использующих ОС Windows и Андроид. Карта в OziExplorer представляет собой графический файл с изображением карты, привязанный таким образом, что пикселю на карте соответствуют реальные географические координаты. При калибровке карты в OziExplorer, создается map-файл, содержащий информацию о калибровке, проекциях карты и ссылку на графический файл.CE по полученным от него данным попытается открыть ту карту, которая соответствует текущему положению пользователя. Если же на устройстве установлено несколько карт, удовлетворяющих текущим координатам, программа откроет самую детальную. На экран также выводятся данные о скорости, азимуте и высоте над уровнем моря. OziExplorer CE использует практически любые карты, которые созданы настольной версией OziExplorer. Кроме того программа работает практически с любым GPS-приемником, выдающим данные в формате NMEA. Она осуществляет автоматический переход с одной карты на другую, позволяет нарисовать желаемый маршрут прямо на экране Pocket PC стилусом, поддерживает голосовую и визуальную навигацию, пишет лог всех точек трека в файл, имеет экран положения GPS-спутников.
В сети Интернет есть большое количество ресурсов, где энтузиасты выкладывают уже отсканированные и привязанные карты для этой программы. Карты покрываются фактически все территорию России и представлены в различных масштабах.
В векторных ЭК применяется метод цифрового представления элементов карты с помощью точек, линий, контуров, заданных своими координатами и соответствующим кодом. При таком методе представления информация карты хранится в памяти в виде последовательности записей, характеризующих каждый имеемый на карте картографический объект. Картографическим объектом (КО) называется реальный объект или явление, изображаемое на карте в условном виде.
Все объекты векторной электронной карты обычно распределяются по определенным тематическим уровням, называемых слоями карты. Такими слоями, например, могут быть: навигационные средства, глубины, качество данных, характеристики и т.д. Разделение нагрузки карты на слои позволяет системе, отображающей ЭК, управлять видимостью этих слоев.
Количество информационных слоев векторной ЭК может быть различным. Требуется их иметь, по крайней мере, три: базовая информация, дополнение базовой информации до стандартной, вся другая информация. Выделение таких слоев позволяет определить три вида нагрузки карты: базовую, стандартную и полную.
Векторные карты сами по себе не являются изображением и не хранят картинки местности. Фактически, при вызове векторной карты, она генерируется «на лету» использую информацию и базы данных. Векторная карта — это база данных, в которой хранится информация о точках, линиях соединяющих эти точки и полигонах, которые являются замкнутой последовательностью линий. Каждый объект имеет дополнительные атрибуты характеризующие свойство, цвет, подписи. Объект, типа «Озеро» является замкнутым полигоном, с заполнением синего (или другого похожего) цвета. Этот объект имеет название, тип, подтип и другие дополнительные данные, которые позволяют не только отображать его на карте, но и использовать в различных алгоритмах поиска, вычисления и сортировки.
После того, как GPS координаты приемника вычислены, его местоположение отображается на карте относительно положение других географических объектов из базы данные векторной карты. При этом на экран приемника выводятся только объекты, расположенные в непосредственной близости от текущего местоположения, с учетом выбранного масштаба. Перемещение приемника, сопровождается сменой «картинки», объекты, которые выходят за границы, скрываются, и отображаются новые участки карты. Заметим, что все это происходит «на лету». Навигационная программа, использующая векторные карты, анализирует текущие координаты, выбранный масштаб, настройки приемника, и создает новое отображение. При этом, в зависимости от масштаба, один и тот же объект может быть представлен в разном виде — схематически, подробно, либо вообще не отображаться. Это сделано для ускорения работы с картой. Каждое перемещение требует новой перерисовки карты и всех ее видимых объектов. Чем больше объектов и чем детальнее они представлены, тем больше времени займет этот процесс. Соответственно, на малом масштабе нет смысла подробно вырисовывать каждый поворот дороги или изгиб реки, достаточно представить их в общем виде. На маленьких масштабах города, не имеет смысла отображать каждый дом, потому что все они сольются в одно единое черное пятно. При увеличении масштаба карты, детальность карты, а именно, составляющих ее объектов, должны увеличиваться. И тот же самый поворот дороги, которым мы пренебрегли на удаленном виде, приобретет значимый смысл и будет важен для навигации и ориентирования. Отображать или не отображать объекты на различных масштабах, решает навигационная программа используя при этом атрибуты объектов и настройки вида, устанавливаемые пользователем.
Подписи к объектам, так же хранятся в базе данных векторной карты и могут динамически подгружаться для отображения на карте. Некоторые программы позволяют изменять настройки связанные с представлением надписей на карте. Можно изменять, шрифт, цвет и расположение надписей относительно объекта. В зависимости от текущего масштаба, надписи могут быть скрыты или отображаться выборочно. По мере приближения карты, надписи проявляются, стараясь не перекрывать при этом друг друга.
В отличие от растровых изображения, имеющих единый стандартизованный формат (.jpg, .bmp, .gif и т.п), векторные карты распространяются в различных форматах. Некоторые могут быть представлены в единых картографических форматах и использоваться с большинством популярных программ, другие только в собственных, способных работать только с одной фирменной программой. «Закрытость» формата обусловлена несколькими причинам. Во-первых, производители навигационного оборудования, вместе с картами вынуждают покупать пользователей приемники и программы только своей фирмы. Во-вторых, картографические данные являются интеллектуальной собственностью, в производство которой были вложены действительно большие деньги, и компании не заинтересованы в распространении этих данных и использовании их в других навигационных продуктах.
Одной из наиболее используемых программ для работы с векторными картами является Навител Навигатор. Это мультиплатформенная и мультиязычная навигация для Android, Symbian, Windows Mobile, iPhone, iPad, Bada, Java, Windows CE. Она имеет собственные on-line сервисы «Навител.Пробки», «Навител.События», «Динамические POI», «Навител.SMS», «Навител.Погода». Существует большое количество актуальных карт России, Европы, Азии и Латинской Америки. При этом Навител предлагают пользователям интерфейсную оболочку для работы с картами, которые можно сгенерировать самостоятельно с использованием популярного картографического редактора GPSMapEdit. На рисунке 4 показан фрагмент карты Навител центральной части Воронежа.
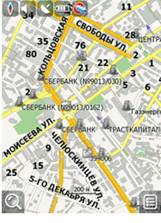
Рисунок 4 — Карта Навител центральной части Воронежа.
Имеются и другие программы для работы с векторными картами. Это «iGo», «TomTom» «Destinator», «Автоспутник» и другие. Они используют картографическую базу известных поставщиков «TeleAtlas» и «NavTech».
6 Геодезическая основа отсчета координат ЭК
Объект на карте характеризуется горизонтальными координатами (широта, долгота) и вертикальной координатой (высота или глубина).
В основе отсчета горизонтальных координат лежит та или иная геодезическая система, называемая также горизонтальным геодезическим вотумом. Основой для отсчета вертикальных координат служит уровень моря, принимаемый за ноль глубин. Этот уровень называют вертикальным геодезическим датумом либо приливным уровнем.
Горизонтальный геодезический датум включает в себя геодезические координаты исходного пункта опорной геодезической сети, геодезический азимут направления на один из смежных пунктов, определенные астрономическим путем, и высоту геоида в этом пункте над поверхностью принятого референц-эллипсоида. Референц-эллипсоидом называют Земной эллипсоид определенных размеров, на который проектируют все пункты опорной геодезической сети и к которой относят топографические и гидрографические съемки и составляемые по ним карты земной поверхности.
Система координат, полученная в результате уравнивания опорной геодезической сети на референц-эллипсоиде, и представляет собой ту или иную геодезическую систему координат либо горизонтальный геодезический датум. Исходными пунктами геодезических датумов часто являются определенные точки астрономических обсерваторий, геодезические координаты которых широту и долготу определяют путем астрономических наблюдений, освобожденных от влияния уклонения отвеса.
Различают локальные, региональные и всемирные геодезические системы координат. Локальные датумы являются геодезическими системами небольших участков земной поверхности. Региональные геодезические системы относятся к обширным районам Земли. В качестве примеров таких систем координат можно назвать: Советскую 1942 года (Pulkovo 1942), Европейский датум 1950 года (ED50), Британскую систему 1936 г., Токийский датум, Новый североамериканский датум 1983 г, (NAD83— New North American Datum of 1983).
Следует отметить, что если горизонтальный датум относится к территории государства, то он называется национальным. Всемирный датум — это геодезическая система координат для всего земного шара. Примерами всемирных датумов являются американские системы WGS72, WGS84 и российская система П390 (SGS90 — Soviet Geocentric Coordinate System 1990).
Создание геодезических систем координат обширных районов земной поверхности зависит от возможностей технических средств. Когда эти средства были только оптическими, опорная геодезическая сеть могла включать только пункты, три из которых в любом месте находятся в зоне прямой видимости. Появление космической техники для точного определения положения на поверхности Земли привело к возможности создания всемирной геодезической системы.
Полученные до 1930 года горизонтальные геодезические датумы были локальными. С 1930 и до 1950 года в разных странах были проведены геодезические работы по созданию региональных датумов. Начиная с пятидесятых годов, региональные геодезические системы стали не удовлетворять целям применения появившегося вооружения, которое требовало геодезическую систему отсчета мирового масштаба. Появление навигационной спутниковой системы «Транзит» позволило в I960 г. Министерству Обороны США создать путем объединения на основе спутниковых наблюдений различных региональных геодезических сетей Мировую геодезическую систему (Word Geodetic System of 1960 — WGS60).
Эта система уточнялась в 1966, 1972, 1984 году. В настоящее время используется система координат WGS84, которая получила широкое распространение во всем мире. Она совпадает с NAD83. Большая а и малая b полуоси референц-эллипсоида WGS84 соответственно равны:
- а=6378137.00 м;
- б =6356752.31 м.принята за стандартную при расчетах положения определяющихся объектов в GPS. В WGS84 рекомендуется составлять официальные векторные ЭК. Расчеты кинематических параметров объектов в ГЛОНАСС ведутся в советской мировой геодезической системе П390.
Координаты одного и того же объекта, отнесенные к разным геодезическим датумам отличаются. Разность между положением объектов в разных геодезических системах может превышать несколько сот метров. Разность между положением объектов в системах WGS84 и П390 не превышает 15 метров, а между положением в WGS84 и WGS72 — 17 м. Разность между положением в системе WGS84 и в системе отсчета координат карты одного из районов в Эгейском море, основанной, на съемке 1862 г, доходит до 2-5 миль. Разделение земной поверхности на отдельные карты называется разграфкой или нарезкой. Для ЭК используют два вида разграфки: разграфку гидрографических служб, и равномерную разграфку, предложенную IHO. Характерной чертой разграфки гидрографических служб является перекрывание соседними картами определенной акватории на их стыке и зависимость шага разграфки от широты, что обеспечивает приблизительное выравнивание площадей поверхности карт на разных широтах. В равномерной разграфке в качестве разделяющих карты линий используются отрезки меридианов и параллелей с шагом, одинаковым по угловой величине для широты и долготы. Соседние карты при такой разграфке стыкуются между собой без перекрытия. Параметры разграфки приняты IHO для планов — 7.5′; карт гаваней — 15′; карт побережья — 1°; генеральных карт — 5°; карты мира — 10°. Карте каждого района по определенной системе присваивается номер (идентификатор), по которому однозначно определяется место этого района на карте мира.
2. Анализ электронных средств отображения картографической информации
1 Общие принципы работы навигационных приёмников
Потребительский сегмент систем GPS и ГЛОНАСС составляют приёмники сигналов спутников. Навигационный приёмник можно разделить на три функциональные части:
- радиочастотную часть;
- цифровой~коррелятор;
- процессор.
С выхода антенно-фидерного приемника сигнал поступает на радиочастотную часть (рисунок 5).
Основная задача этой части заключается в усилении входного сигнала, фильтрации, преобразовании частоты и аналого-цифровом преобразовании. Помимо этого, с радиочастотной части приёмника поступает тактовая частота для цифровой части приёмника. С выхода радиочастотной части цифровые отсчёты входного сигнала поступают на вход цифрового коррелятора.
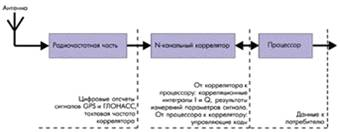
Рисунок 5 — Обобщённая структура приёмника
В корреляторе спектр сигнала переносится на «нулевую» частоту. Это производится путём перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. Далее результат перемножения проходит корреляционную обработку путём перемножения с опорным дальномерным кодом и накоплением на периоде дальномерного кода. В итоге получаем корреляционные интегралы I и Q. Отсчёты корреляционных интегралов поступают в процессор для дальнейшей обработки и замыкания петель ФАП (фазовая автоподстройка) и ССЗ (схема слежения за задержкой).
Измерения параметров сигнала в приёмнике производятся не непосредственно по входному сигналу, а по его точной копии, формируемой системами ФАП и ССЗ. Корреляционные интегралы I и Q позволяют оценить степень коррелированности опорного и входного сигналов. Задача коррелятора, помимо формирования интегралов I и Q, — формировать опорный сигнал, согласно с управляющими воздействиями, поступающими с процессора. Кроме того, в некоторых приёмниках коррелятор формирует необходимые измерения опорных сигналов и передаёт их в процессор для дальнейшей обработки. В то же время, так как опорные сигналы в корреляторе формируются по управляющим кодам, поступающим с процессора, то необходимые измерения опорных сигналов можно производить непосредственно в процессоре.
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения до измерительного пункта. В навигационных системах GPS/ГЛОНАСС излучение сигналов синхронизировано со шкалой времени системы, точнее, со шкалой времени спутника, излучающего данный сигнал. В то же время, потребитель имеет информацию о расхождении шкалы времени спутника и системы. Цифровая информация, передаваемая со спутника, позволяет установить момент излучения некоторого фрагмента сигнала (метки времени) спутником в системном времени. Момент приёма этого фрагмента определяется по шкале времени приёмника. Шкала времени приёмника формируется с помощью кварцевых стандартов частоты, поэтому наблюдается постоянный «уход» шкалы времени приёмника относительно шкалы времени системы. Разность между моментом приёма фрагмента сигнала, отсчитанным по шкале времени приёмника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженная на скорость света, называется псевдодальностью [4].
Корреляционные интегралы, формируемые в корреляторе, позволяют отследить модуляцию сигнала спутника символами информации и вычислить метку времени во входном сигнале. Метки времени следуют с периодичностью 6 с для GPS и 2 с для ГЛОНАСС. В пределах одного деления этой шкалы периоды дальномерного кода образуют 1-мс шкалу. Одна миллисекунда разделена, в свою очередь, на отдельные элементы (chips, в терминологии GPS): для GPS — 1023, для ГЛОНАСС — 511. Таким образом, элементы дальномерного кода позволяют определить дальность до спутника с погрешностью ~300 м.
Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0,01 периода, что составляет точность определения дальности 3 м.
Сегмент потребителей включает приемники GPS или ГЛОНАСС и сообщество самих пользователей. Навигационная аппаратура потребителя (НАП) принимает сигналы, обрабатывает их, измеряет и определяет радионавигационные параметры, вычисляет геоцентрические координаты Х, У, Z и на их основе — геодезические координаты и высоту над опорным эллипсоидом в системе координат ПЗ-90 (возможна также работа в системах WGS-84, СК-42, Гаусса-Крюгера и др.), поправку к местной шкале времени Т относительно системного времени GPS ГЛОНАСС и составляющие вектора скорости. Можно выделить следующие виды навигационного оборудования. Это персональные навигаторы, навигаторы для наземного транспорта, Для морских и речных судов, авиации, геодезическая аппаратура, аппаратура функциональных дополнений, аппаратура космического базирования, радиомаяки. Целью работы является анализ систем персонального применения.
В качестве примера можно рассмотреть навигационный приемник NV08C-MCM разработанный компанией «НАВИС». Внешний вид приёмника показан на рисунке 1 Приложения В. NV08C-MCM — это миниатюрный встраиваемый модуль приема сигналов глобальных навигационных спутниковых систем (ГНСС).
Ключевой особенностью устройства является его способность работать как с ГНСС, которые уже развернуты GPS и ГЛОНАСС, так и с ГНСС GALILEO и COMPASS, а также с сигнала их функциональных дополнений SBAS. NV08C-MCM был разработан для использования в высокопроизводительных приложениях, критичных к стоимости и потреблению энергии:
- в автомобильных и карманных персональных навигаторах;
- спутниковых автосигнализациях;
- в системах наблюдения и безопасности.
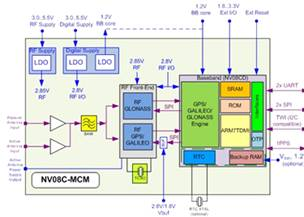
Рисунок 6 — Структурная схема приемника NV08C-MCM
C-MCM обеспечивает высокую чувствительность и быстрое получение первого решения навигационной задачи в сочетании с низким энергопотреблением и малыми размерами. Принимаемые сигналы — GPS/GALILEO/COMPASS/SBAS: L1 1575.42 MHz ГЛОНАСС: L1 1597.5…1609.5 MHz, имеет 32 канала слежения. Точность получения навигационных параметров (RMS) составляет:
в плоскости:
- в автономном режиме 2,5 м;
- в дифференциальном режиме 1 м;
- высоты 3 м;
- скорости 0,05 м/с;
- времени (1PPS) ±25 нс.
Приемник (рисунок 6) имеет интерфейсы 2x RS-232E, I/O порт (1.8…3.3 В CMOS-уровень), — 2x SPI, TWI (I2C совместимый), — 1PPS выдача (CMOS уровень).
Частота выдачи данных составляет до 230 400 бит/с. На основании измерений параметров опорного гармонического колебания, формируемого системой ФАП, определяют частоту и фазу несущего колебания спутника. Его уход относительно номинального значения даст доплеровское смещение частоты, по которому оценивается скорость потребителя относительно спутника. Кроме того, фазовые измерения несущей позволяют уточнить дальность до спутника с погрешностью в несколько мм.
Существует большое количество навигационных приемников различных типов. Можно выделить геодезические, авиационные, морские, персональные навигационные приемники. В данной работе ограничимся системами отображения картографической информации персонального назначения. Можно выделить несколько систем такого типа.
Во- первых, это персональные GPS или ГЛОНАСС навигаторы, используемые в первую очередь как автомобильные или туристические навигаторы. Обеспечивают большинство функций предустановленных автопроизводителем устройств, а также имеют некоторые специфические особенности. Их плюсы — компактность, малый вес, возможность переставлять с автомобиля на автомобиль, поэтому для многих лучший GPS навигатор — именно такой. GPS-навигатор может служить не только штурманом, но и выполнять функции Bluetooth-телефона, MP3-плейера, FM-приемника. Все такие GPS навигаторы снабжены разъемом для 12-вольтового автомобильного аккумулятора. Батарея также позволяет заранее задать маршрут. Некоторые модели имеют обычный AC-разъем для использования в доме и перезарядки, а также USB-порт. Отдельным классом персональных приёмников являются военные приемники. К ним предъявляются специфические требования.
Следующим типом персональных навигационных систем являются системы на основе смартфонов или коммуникаторов оснащенные соответствующим аппаратным и программным обеспечением. В условиях, когда портативность и энергоэкономичность не играют особой роли, то используются навигационные системы на основе ноутбуков и нетбуков с подключаемыми внешними приемниками.
2 Стандартные гражданские навигационные приемники
Проанализируем некоторые типы навигаторов. Бесспорный лидер отечественного рынка навигаторов — фирма Garmin. Недавно появилась новая серия навигаторов Garmin — 800. Наиболее примечательная модель линейки — Garmin Nuvi 880, она интересна поддержкой MSN Direct. Это навигационная система, распознающая речь, имеющая цифровую карту высот и базированная на операционной системе Linux. Однако стоит заметить, что распознавание речи не распространяется на русский язык, потому, в сущности, в реалиях России и СНГ именно эта функция, поданная как особенность аппарата, оказывается бесполезной. В остальном, качество навигатора достаточно высокое. Яркий сенсорный TFT-дисплей (480×272), мультимедийные функции (FM-радио, просмотр фотографий, прослушивание MP3 и аудиокниг).
Garmin Nuvi 880 — это, безусловно, качественный навигатор с множеством функций, однако разумнее было бы выбрать уже адаптированный к стране использования навигатор из предыдущих линеек. Наиболее популярным в стране навигатором данной компании является GPS-навигатор Garmin Nuvi 3790T. Внешний вид устройства представлен на рисунке 1 приложения Г.
Вместе с навигатором в комплект входит крепление на стекло и панель приборов, зарядку от аккумулятора, USB кабель, FM-антенну с присосками, диск с ПО и инструкцию пользователя. Главное, что выделяет nuvi 3790t среди всего многообразия автонавигаторов — голосовое управление. Прибор научился не только произносить названия улиц, но и понимать русскую речь. Голосовое управление активируется голосовой же командой. По умолчанию это «голосовое управление», но фразу можно поменять в настройках. Причем фраза не надиктовывается, а вводится с клавиатуры. Дальше все просто: называем город, улицу, номер дома и утвердительно отвечаем на вопрос, нужно ли проложить маршрут. В любой момент можно переключиться на традиционный ввод с клавиатуры.
Официальные GPS-навигаторы Garmin поставляются в комплекте с картами «Дороги России». В текущей редакции эти карты отображают достаточно подробные очертания домов, учитывающие не только контур дома, но и его высоту. Сложно сказать, насколько полезно при навигации, как правило, виден только первый ряд домов, да и то не во всю высоту. Детализация карты у Garmin Nuvi 3790T очень хорошая. Теперь на карту накладывается и рельеф — пару лет назад Garmin ввела функцию топографии в свои туристические навигаторы, а теперь применяет её в автомобильных моделях.
Карты в GPS-навигаторе Garmin Nuvi 3790T работают отлично. Высокая детализация изображения, при этом навигатор не нагружает экран лишними данными, мешающими восприятию. Полноценная база объектов позволяет не потеряться в незнакомом городе или быстро найти заправку или шиномонтаж в новом районе. Чтобы использовать навигатор по-максимуму, рекомендуется загрузить с сайта Garmin.ru комплект POI точек с координатами стационарных радаров, постов ДПС, лежачих полицейских, опасных перекрестков и прочих объектов, о которых лучше знать заранее. Этот навигатор — отличный пример продуманной эргономики. Он компактный и лёгкий, его удобно носить в кармане в режиме пешехода. Навигатор прекрасно ловит спутники в городских условиях, и время не теряет спутники (за исключением заезда в тоннели).
Цветной экран изготовлен по технологии TFT и имеет размер по диагонали 4.3дюйма, обладает разрешением 800х480 пикселей, сенсорный, и обладает антибликовым покрытием. Картография представлена системой City Navigator Russia 2011.40 Navicom — все регионы с детальным покрытием. Содержит 191868 населенных пунктов с адресным поиском. 1 712 населенных пунктов с контурами домов. Путевые точки/ любимые объекты/ местоположения -1000, маршруты-1000. Имеет картридер microSD, microSDHC карт.
Дополнительные функции представлены Bluetooth интерфейсом Hands-Free, развязками в 3D, отображением 3D моделей зданий, достопримечательностей в 3D, возможность добавления карт, голосовые подсказки, выбор режима (авто, пешком, вело), совместимость с FM traffic, функция «Where Am I?», Garmin Locate, ecoRoute, фотонавигация, мировое время, конвертер валют, калькулятор, просмотр фото, Garmin Lock .
Питание -LiPol аккумулятор. Время работы от батареи до 4 часов. Размеры 122 x 75 x 8,9 мм, вес 113 грамм.
Начало 2012 года ознаменовалось важным и давно ожидаемым событием — на рынок стали проникать навигаторы с операционной системой Android. На сегодняшний день таких устройств на рынке пока всего три. Наиболее серьезный из них — Globus GPS GL-850 Android.м Его внешний вид представлен на рисунке 3 Приложения Г.
Навигатор имеет полностью пластиковый и при этом прорезиненный корпус. Дисплей с диагональю 5″ имеет разрешение 800х480. Сенсор резистивного типа. В комплекте идет удобный телескопический стилус. В навигаторе установлен процессор от Samsung с частотой 667 МГц, а за навигацию отвечает 20-канальный Sirf Star III. Не самый новый навигационный процессор, но он будет в любом случае лучше, точнее и быстрее найдет спутники, чем встроенный в процессор. Оперативной памяти всего лишь 128 Мб. Но Android 1.5 много памяти и вычислительной мощности не требует. В Globus GPS GL-850 Android стоит та самая вторая массовая версия Android со всеми ее достоинствами и недочетами. Встроенной памяти 1 Гб, имеется слот для карт памяти. Беспроводные соединения представлены только Wi-Fi 802.11 b/g. Для пробок нужен или Wi-Fi-3G-модем, или телефон с опцией раздачи Интернета по Wi-Fi. Аккумулятор с емкостью 2000 мАч позволяет проработать устройству в течение трех часов в режиме навигации и примерно столько же в режиме Интернета по Wi-Fi.
Навигатор поставляется на рынок с программой «Навител» или «Ситигид». Можно при желании установить любую другую. К недостаткам относятся устаревшая система, устаревший GPS-процессор, отсутствие 3G и даже Bluetooth-приемника. Еще и отзывали его из-за аппаратных проблем. Но сейчас навигатор стал очень недорогим и является более удачным устройством, чем любой аналогичный навигатор, но с Windows CE на борту.
Среди других производителей следует отметить Navitel, Explay, TeXet, Mio и ряд других производителей. В настоящее время на российском рынке предлагается более ста шестидесяти моделей персональных навигаторов поддерживающих наряду с GPS и систему ГЛОНАСС. Примером такого навигатора является Lexand SG-555, внешний вид которого представлен на рисунке 3 Приложения Д. Навигатор построен на чипсете MSTAR с ARM9-процессором MSB2501, работающим с частотой 400 МГц, и GPS/ГЛОНАСС-модулем MSTAR MSB2320. Оперативной памяти в устройстве 128 МБ, плюс есть 2 гигабайта флеша. По аппаратным характеристикам Lexand SG-555 — середнячок, а вот программная составляющая серьёзно устарела: прибор работает под управлением ОС WinCE 5.0.
Включение навигатора занимает сравнительно немного времени — в пределах 10 секунд. После этого попадаем в меню. Здесь всего три пункта: Навигация, ГЛОНАСС/GPS и Медиа (Рисунок 4 Приложения Г).
Ловит спутники двухсистемный модуль MStar хорошо и сравнительно быстро. Поскольку мы имеем дело с ГЛОНАСС/GPS-приёмником, оценивать время запуска непросто: весь процесс — от нуля до хотя бы трёх спутников в каждой системе — занимает минуты две. По ходу тестирования не удалось установить чётких закономерностей, сигналы каких спутников (российских или американских) ловятся быстрее. По количеству отображаемых спутников лидера в двух системах также установить непросто. Москве, так и в Московской области в среднем количество спутников, используемых приёмником, было примерно одинаковым. Сигналы обеих систем принимаются стабильно.
Пункт меню ГЛОНАСС/GPS — удобная утилита, наглядно показывающая как общее количество спутников в зоне видимости, так и количество тех из них, что пригодны для использования (рисунок 5 Приложения Г).
В качестве «штатной навигации» на борту Lexand SG-555 установлена популярная программа Navitel Navigator пятой версии с картой России (на сайте производителя упоминается, что также доступны СитиГИД и ПроГород).
Эта программа заслужила известность благодаря высокодетальной карте, чётким маршрутам и множеству опций, позволяющих настроить программу наиболее удобно. В версии для гибридного навигатора Navitel чётко работает с ГЛОНАСС и GPS — на экране есть два индикатора, показывающие количество спутников двух систем. Интересно, что позиционирование совершается с использованием данных сразу двух систем. Показать положение программа может уже тогда, когда, например, пойманы сигналы двух спутников ГЛОНАСС и одного спутника GPS. При увеличении числа спутников позиционирование корректируется. Точность позиционирования по ГЛОНАСС несколько ниже, чем по GPS. Информация о спутниках представлена на рисунке 7.
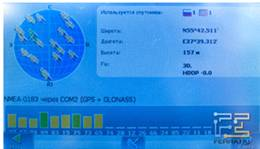
Рисунок 7 — Экран информации о спутниках
В целом, Lexand SG-555 — годное, рабочее устройство среднего класса. Тем не менее, нельзя не отметить нескольких недочётов:
- ОС Windows CE 5.0 (на аппаратном обеспечении навигатора нормально работала бы и Win CE 6.0);
- Не очень чёткая работа экрана при пальцевом управлении;
- Отсутствие коммуникационных функций — невозможность использования сервисов информации о пробках.
«Пробочный» сервис уже практически стал стандартом для современных навигаторов, и отсутствие его в модели 2011 года — непонятное решение. К тому же, предустанавливаемая на устройство навигационная программа Navitel Navigator известна своим сервисом трафика Навител.Пробки. Таким образом, на Lexand SG-555 не реализуются все возможности программы.
Что касается «двухсистемности», то это самый интересный момент. Фактически точности, обеспечиваемой GPS (от 2 до 8 метров), вполне достаточно. На сегодня ГЛОНАСС почти не уступает американской системе, обеспечивая точность в 4,5-8,5 метра. То есть, навигатор, использующий только ГЛОНАСС, имеет такой же смысл, как и привычные GPS-устройства.
Главные же преимущества использования двух систем — более точное позиционирование и надёжность, double proof — двойная гарантия позиционирования при плохом приёме сигналов спутников одной из систем. В наших широтах и севернее это актуально: теоретически сигналы спутников GPS могут ловиться хуже (что обусловлено наклонением их орбиты), а ГЛОНАССа — лучше (наши спутники летают «выше»).
Навигатор Lexand SG-555, таким образом, представляется навигационным прибором для активных автопутешественников, которых может занести либо далеко на Север — тогда к их услугам ГЛОНАСС, либо на Юг, например, в Африку — тогда на первый план выйдет GPS. Преимуществ у использования Lexand SG-555 в городе нет, наоборот, есть недостаток — отсутствие возможности работать с «пробочным» сервисом (реализованным, кстати, в большинстве представленных на нашем рынке навигационных программ).
В настоящее время реализуются попытки построить отечественные персональные навигаторы. Примером такого навигатора является ГЛОНАСС/GPS-навигатор РИРВ НТ-1813 (рисунок 1 Приложения Д).
Прибор от начала и до конца разработан ОАО «РИРВ» (ОАО «Российский институт радионавигации и времени»), одним из родоначальников системы ГЛОНАСС. Работает под управлением операционной системы Windows CE 6.0. В качестве процессора используется FreeScale i.MX31 с тактовой частотой 532 МГц, что обеспечивает оперативную обработку информации со спутников ГЛОНАСС и GPS, а также плавную прокрутку карт и быструю прокладку маршрутов.
Повышенная точность позиционирования обеспечивается благодаря трехмодовому приемовычислительному модулю ГЛОНАСС/GPS/SBAS 1К-181 с интегрированной системотехникой и пониженным энергопотреблением. Приемовычислительный модуль позволяет одновременно использовать спутники ГЛОНАСС и GPS, что значительно увеличивает точность позиционирования. В определении местоположения участвуют по 3-7 спутников каждой из систем. В ходе испытаний бывали ситуации, когда общее число спутников доходило до 15. В условиях неуверенного приема (на узких улицах между высоких домов, или на дороге, окруженной высоким лесом) обе системы дополняют друг друга. И там, где навигаторы, использующие только GPS или только ГЛОНАСС, потеряли бы спутники, устройство, параллельно использующее обе системы, показало хорошие результаты.
Помимо ГЛОНАСС и GPS, НТ-1813 способен принимать корректирующие сигналы с геостационарных спутников SBAS (Satellite Based Аugmentation System), которые передаются над определенными регионами. В частности, в западной части России будут приниматься сигналы EGNOS (European Geostationary Navigation Overlay Service).
Основное меню навигатора (рисунок 2 Приложения Д) состоит из шести разделов: «Компас», «Карта», «Диаграмма», «Навигация», «Приложения», «Настройки». В меню «Приложения» спрятаны читалка книг и плеер. В «Настройках» можно отключить ГЛОНАСС или GPS, чтобы посмотреть, насколько изменится точность и стабильность позиционирования при использовании только одной из систем. В соседнем подменю выбирается вариант оформления, часовой пояс и регулируется громкость. В «Пороговых значениях» можно произвести настройки, балансируя между повышением точности позиционирования и расширением угла обзора приемника (чем больше угол, тем с большего количества спутников принимается сигнал).
Раздел «Компас» содержит электронный компас, который пригодится, если ты пересечешь границы заложенных в память навигатора карт. Здесь же отображаются широта и долгота точки, в которой ты находишься, а также высота над уровнем моря, скорость и азимут направления. Эти же данные за исключением компаса приведены и в меню «Навигация».
В разделе «Диаграмма» можно увидеть, какие спутники обеих систем в данный момент летают над твоей головой, и какие из них навигатор использует для расчета местоположения.
Между разделами «Компас», «Диаграмма» и «Навигация» можно переключаться, не выходя в главное меню, также прямо из них можно перейти в меню навигационной программы «СитиГИД».
Однозначно на сегодняшний день это лучший навигатор с поддержкой ГЛОНАСС на рынке и одно из самых интересных предложений среди автонавигаторов. К числу потребительских недостатков системы относится неудобное расположение miniUSB и ограничения в навигационной программе, установленные из-за потенциальной возможности неточного определения координат в системе GPS (в программе «СитиГИД» версии 3.5 минимальное отклонение от маршрута, после которого он будет пересчитываться, составляет 30 м), не позволяют в полной мере воспользоваться преимуществами высокой точности позиционирования, обеспечиваемой совместным использованием ГЛОНАСС и GPS. К счастью, последний недостаток, по свидетельству производителей навигационных программ, легко
3 Военные навигаторы
Особым видом персональных навигаторов являются военные навигаторы. В настоящее время в российскую армию начал поступать персональный навигатор ГЛОНАСС/GPS «Грот-М», позволяющий отображать картографическую информацию. Его внешний вид представлен на рисунке 3 Приложения Д.
Первая модель навигатора «Грот», выпускаемая с 2003 по 2010 год состоит на вооружении российской армии, а также ряда стран Африки и Латинской Америки и произведен тиражом порядка 10 тысяч экземпляров. В наших вооруженных силах применяется, в основном, командирами артиллерийских подразделений, разведкой, горными стрелками и частями специального назначения. По штату его положено иметь и в мотострелковом батальоне, а также ротным тактическим группам, действующим в отрыве от основных сил. Корпус навигатора изготовлялся из цельного бруска алюминия методом фрезеровки, что обуславливало высокую прочность изделия, но одновременно значительно утяжеляло его. Поскольку прибор первоначально предназначался только для определения координат и решения задач в артиллерии, то он получил маленький экран и не поддерживал отображение карт. Для удобства работы в сильный мороз, когда руки в перчатках, навигатор оснастили большими кнопками.
Новая модель построена на основе СБИС GNSS32L512 содержащей 32-битный процессор ARM и имеет цветной дисплей с разрешением 320х240. Кнопки расположены в верхней части навигатора, поскольку именно при таком расположении прибор удобнее всего лежит в руке и нажатия на кнопки наиболее комфортны. Навигатор выдерживает нахождение под водой на глубине 1 метра в течение суток и может после этого работать.
«Грот» можно подключать к сетям с низким напряжением (от 10 до 30 вольт), что позволяет заряжать его от бортовой сети автомобилей и бронетехники. Заряжать блоки аккумуляторов возможно как в самом приборе, так и в отдельном зарядном устройстве. Энергопотребление навигатора составляет 1.05-1.1 Вт не более 1 Вт.
Навигатор может работать одновременно с 32 спутниками, что значительно повышает точность позиционирования. Она зависит от многих факторов (количество спутников, рельеф местности и т.п.) и составляет 10 м (режим работы, когда взаимодействие идет только со спутниками), что сравнимо с аналогичными показателями американского военного навигатора DAGR. Дифференциальный режим позволяет, используя базовые станции, увеличить точность позиционирования до десятков сантиметров.
По желанию заказчика возможна установка слота под SD-карты флеш-памяти, но военные пока не просят о такой возможности. Внутренняя же память самого устройства составляет 256 мегабайт.
Микросхема навигатора целиком разработана на предприятии, кроме ядра процессора, который закуплен по лицензии. Схемотехника цифровой части, топология — все отечественное, а вот физическое изготовление — Китай, Тайвань. Монтаж платы опять же происходит у нас.
Навигатор позволяет записывать маршрут и показывать его на фоне карты. Карты, маршруты можно закачивать в прибор и снимать с него через интерфейс USB (порт для USB, RS-232 и RS-485 один, в комплекте идет разветвитель).
В комплекте к изделию идет программное обеспечение, позволяющее конечному пользователю сопрягать навигатор с операционными системами на базе Linux и Windows. Предполагается, что при желании пользователь сможет устанавливать в «Грот» любые карты от сторонних разработчиков, используя специальный конвертер из комплекта программного обеспечения.
Навигатор может решать сервисные задачи, которые необходимы для нужд армии:
- по заданным координатам, расстоянию и азимуту определяются координаты точки, которую необходимо обстрелять;
- по заданным двум парам координат определяется расстояние и азимут между ними;
- по координатам двух точек и углу между ними определяются координаты третьей точки;
- измерение дирекционного угла и т.п.
Возможен пересчет долготы и широты в координаты Гаусса-Крюгера и обратно.
В 2013 году начались поставки в силовые ведомства и Вооруженные силы навигаторов «Орион» «КБ «Навис». «Орион» предназначен для командиров подразделений — до командира взвода или отделения включительно. Масса устройства — 320 грамм. Оно способно работать от штатной батареи 24 часа в температурах от минус 30 градусов до плюс 55 градусов Цельсия. Военный навигатор сохраняет работоспособность при повышенной влажности, воздействии осадков, после погружения в воду на глубину до 1 м и после падения с высоты полутора метров. С завода навигаторы будут выходить «чистыми» — без встроенных цифровых карт. Устанавливать карты необходимой местности будет картографическое управление Минобороны.
Навигатор выполняет автоматическое определение текущих координат места (широта, долгота, высота), текущего вектора путевой скорости (путевой угол, путевая скорость) фиксированной точки (фазового центра антенны), выдачу на индикацию данных навигационных определений и времени, к которому они относятся. Ввод корректирующей информации МДПС производится по интерфейсу RS-232 и ее учет при решении навигационной задачи. Обеспечивается автоматическое распределение аппаратных каналов приема радиосигналов НКА СНС. Обеспечивается индикация состояния каналов приема и решение навигационной задачи по минимальному созвездию из трех НКА одной СНС.
Обеспечивается автоматический самоконтроль технического состояния НАП «Орион» (в том числе навигационной антенны СНС) с индикацией и выдачей по цифровому интерфейсу информации об отказавшем узле, как при включении, так и во время работы и ввод оператором и индикация минимального допустимого угла возвышения НКА.
Осуществляется индикация текущего времени в ШВ UTC SU (или при вводе поправки — в местном времени) в формате часы, минуты, секунды и выдача на индикацию и во внешние устройства навигационных параметров в системах координат WGS-84, ПЗ-90.02, СК-95, СК-42 (Балтийская система высот) или в системе, параметры которой вводятся оператором.
Индикация происходит по выбору оператора координат места в виде геодезических координат (B, L, H) или в виде плоских прямоугольных координат в проекции Гаусса-Крюгера (x, y, z).
Прибор позволяет выполнять ряд картографических задач. Это считывание и сохранение в памяти электронных карт местности объемом до 100 Мб, отображение карты на дисплее, отображение на карте местонахождения приемника навигационного портативного с одновременным отображением координат местоположения и направления движения, масштабирование карты по команде оператора, еремещение листа карты (в видимой области) по команде оператора с возможностью быстрого возвращения к виду с последней используемой точкой на карте.
«Орион» обеспечивает решение задач пространственной ориентации и их использование при решении задач по назначению при помощи встроенного трехосного магнитного компаса. Обеспечивается возможность решения ряда других задач.
4 Портативные туристические GPS-навигаторы
Главные достоинства туристического GPS-приемника — способность определить координаты в условиях, когда вид неба загорожен деревьями или другими препятствиями и быстрота определения этих координат. Предпочтение следует отдавать 12-канальным моделям и выше. Важна простота использования. Наилучшим решением является настраиваемая пользователем экранная форма, способная отображать ту информацию, которая нужна. Помимо дизайна, следует обратить внимание на вес и габариты. Важны прочность и погодозащищенность корпуса (надежнее модели, корпуса которых герметично закрыты и заполнены азотом), продолжительность автономной работы (батареек обычно хватает до 16 часов), возможность использовать питание от бортовой электрической системы. Очень максимальное число точек, которыми можно отметить будущий маршрут.
Размеры экрана портативных GPS-навигаторов примерно одинаковы. Большинство моделей оснащены цветным экраном с антибликовым покрытием, который хорошо читается и в темноте и на ярком солнце. Экраны в градациях серого остались только в дешевых моделях.карты для туристических навигаторов бывают трех типов: топографические, автомобильные и морские. Топографические позволяют просматривать ближайшие объекты относительно вашего местоположения. На них обозначены дороги, просеки, водоемы, населенные пункты. На подробных картах можно строить маршрут. Автомобильные больше подходят для автомобильных навигаторов. В портативных навигаторах возможны загрузка и использование морских карт или карт с глубинами (в зависимости от маршрута путешествия).
Навигаторы по возможности работы с тем или иным типом картографии делятся на: приборы без возможности загрузки GPS карт; приборы со встроенной памятью для карт (поддерживают туристические и морские карты), память приборов при этом относительно невелика, ее хватает на 2-3 области; приборы со слотом для карт памяти, такие приборы поддерживают все три типа картографии и поэтому нет ограничения ее объемом, т.к. карточку памяти всегда можно сменить. Чем больше объем памяти, тем больше карт и в более подробном масштабе можно в него загрузить. Для установки карт расширения памяти прибор должен иметь специальный разъем.
Выбирая gps навигатор нужно обратить внимание и на дополнительные функции. Многие модели комплектуются барометром, высотомером и магнитным компасом. Барометрический высотомер позволяет измерять высоту с точностью до 1-2 метров. Этой функцией пользуются в горах. По изменению атмосферного давления за продолжительное время можно также прогнозировать погодные условия. Для определения сторон света, обычному навигатору требуется, чтобы пользователь передвигался с некоторой скоростью. Стоя на месте, определить где запад, восток — не получится, вот тут то и выручит электронный компас.
Ведущими мировыми производителями портативных навигаторов являются компании Garmin, Magellan и др. У российских покупателей приборы Garmin пользуются большей популярностью. Для навигаторов этой компании в России достаточно развита сеть сервисных центров. Все современные модели портативных навигаторов Garmin отличаются качественным приемником сигнала, влагозащищенностью. Качество приема обеспечивается последним поколением GPS-чипсетов, позволяющих обрабатывать не только прямые сигналы от спутников, но и переотраженные от атмосферы и крупных объектов. Основные функции, присущие всем портативным GPS — навигаторам Garmin — это запись пройденного пути, сохранение текущего местоположения, указание направления на заранее сохраненную точку или точку с известными координатами. При выходе на известную точку, на экране навигатора появляется прямая линия, соединяющая текущее местоположение и точку, к которой надо двигаться.
Однако туристические GPS-навигаторы имеют ряд важных отличительных особенностей, рассчитанных на работу в непростых для электроники условиях, поскольку они созданы специально для людей, ведущих активный образ жизни, — туристов, спортсменов, велосипедистов, грибников, рыбаков. Основным преимуществом портативных навигаторов является их малое энергопотребление и легкая замена элементов питания; наличие карт местности, включающих в себя высоты и глубины, запись треков/маршрутов, а также такие специализированные дополнительные опции, как электронный компас, альтиметр, барометр, календарь рыбака/охотника и др.
Портативные туристические навигаторы появились в России уже давно, и многие любители рыбной ловли стали пользоваться ими еще до того, как в обиход вошли автонавигаторы. Дело в том, что для туристического похода и рыбалки, скажем на водохранилище, достаточно было иметь простейшую топографическую карту местности. Небольшие российские фирмы занимались изготовлением таких карт для навигаторов Garmin, а некоторые пользователи делали их сами.
Если в мире автомобильных навигаторов существует достаточно сильная конкуренция, то среди туристических моделей на нашем рынке господствует Garmin. Эта компания производит несколько линеек классических туристических навигаторов: eTrex, 60 серия, 76 серия, Oregon. Кроме того, Garmin выпускает и специализированные спортивные навигаторы: Forerunner — для бегунов и Edge — для велосипедистов. На рисунке 3 Приложения Е показаны туристические навигаторы Garmin eTrex . Они обладают ударопрочным и влагонепроницаемым корпусом и может работать в широком диапазоне температур (от -20°C до +70°C).
Спутниковый GPS-сигнал может быть принят с любого направления, но для получения наилучшего результата объект должен находиться под максимально открытым участком неба (вплоть до горизонта).
Металлические поверхности, здания, плотные кроны деревьев и т.п. блокируют сигнал. Мощные передатчики (особенно в микроволновом диапазоне) могут вносить сильные искажения. Лучше избегать мест, через которые проходит сфокусированное микроволновое излучение, или территорий, расположенных вблизи мощных радаров, которые излучают волны на радиочастотах, близких к кратным значениям частоты сигнала L1 (1575,42 МГц).
Для начинающих туристов отлично подойдет самая простая модель туристического навигатора Garmin eTrex H. Это компактное (112x51x30 мм) и легкое (150 г) устройство, работающее от двух пальчиковых батареек AA (до 17 часов), является водонепроницаемым в соответствии со стандартом IPX7. В памяти eTrex H может храниться до 500 путевых точек, а функция TrackBack позволит пользователю без проблем вернуться домой: она переворачивает траекторию и направляет к начальной точке. GPS-приемник навигатора eTrex H поддерживает аугментацию WAAS, которая обеспечивает быстрый поиск спутниковых сигналов и точный расчет местоположения даже под плотными кронами деревьев и в глубоких оврагах, однако действует эта функция только на территории США.
В таблице приложения Е представлены характеристики моделей туристических навигаторов Garmin eTrex с поддержкой ГЛОНАСС. Благодаря поддержке ГЛОНАСС, Garmin eTrex 10, 20 и 30 при тех же условиях находят больше спутников, чем навигаторы с поддержкой только GPS.
Это положительно сказывается в первую очередь на устойчивости приёма, что особенно важно при нахождении в «проблемных» местах (например, в окружении небоскрёбов, или, наоборот, в низине в густом лесу).
В настройках может отключить использование Глонасс, оставив работать лишь GPS. Приборы поддерживают работу как с векторными так и с растровыми картами. На рисунке 8 показана работа навигатора Garmin eTrex 20 в различных режимах.
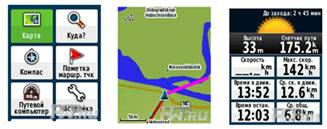
Рисунок 8 — Работа навигатора Garmin eTrex в различных режимах.
5 Системы на основе внешнего приемника и ноутбука или нетбука
Помимо вышеперечисленных GPS навигаторов встречается еще один вариант — использование GPS-приемника и картографического ПО на ноутбуке. Плюсом такого решения является функциональность полноценного GPS-навигатора, а минусом — использование ноутбука во время движения не всегда удобно. Существуют различные типы GPS-приемников.
Популярен BU-353 — выносной GPS-приёмник с USB-интерфейсом (рисунок 9).
Он предназначен для пользователей лэптопов, ноутбуков, ПК и КПК с USB-хостом. В одном корпусе совмещён GPS-приёмник и активная антенна (GPS Mouse).
В основе приёмника лежит чипсет SiRFstarIII, обеспечивающий высокое качество и скорость определения координат.

Рисунок 9 — Выносной GPS-приёмник с USB-интерфейсом BU-353
Приемник имеет USB-интерфейс и имеет 20 параллельных каналов, встроенную активную высокочувствительную антенну. Время «холодного стара» — 45 секунд, сообщения NMEA 0183 v2.2: GGA, GSA, GSV, RMC (GLL, VTG — опционально).
Потребляемый ток — 80 мА.Ддлина кабеля 1.5 м.
В комплект поставки входит:
- GPS-приёмник BU-353 со встроенной антенной и USB-интерфейсом;
- зажим для кабеля с присоской на стекло;
- CD с драйверами и тестовым ПО;
- руководство пользователя на русском языке.
Наряду с приемником с интерфейсом на российском рынке появились персональные навигационные приемники поддерживающие протокол беспроводной передачи данных Bluetooth. Примером такого приемника является Garmin GPS 10 Deluxe (рисунок 10).
Устройство предназначено для работы в паре с ноутбуками или карманными компьютерами и позволяет превратить электронный картографический носитель в полноценную навигационную систему. Благодаря программному обеспечению (Garmin nRoute и Que) пользователь может отыскивать адреса объектов (Европа), выбирать пункты назначения, выполнять перерасчет маршрута при отклонении от нужного пути, автоматически рассчитывать маршруты и получать голосовые подсказки во время движения.
Рисунок 10 — Приемник Garmin GPS 10 Deluxe
Компактный GPS-приемник, имеющий автономное питание (12 часов работы от литий-ионного аккумулятора), закрепляется под лобовым стеклом или на крыше автомобиля с помощью магнитной подошвы или «липучки» и может обмениваться данными с портативным компьютером на расстоянии до 10 метров. Корпус приемника защищен от влаги по стандарту IPX7, допускающему погружение в воду на глубину один метр в течение 30 минут.
В комплект входит полностью разблокированный диск MapSource City Select Europe CD-ROM, программное обеспечение nRoute для ноутбуков, программное обеспечение Que для карманных компьютеров, крепежные приспособления, 12-вольтовый адаптер и руководство пользователя.GPS-приемник Holux M-1000 (рисунок 11) обеспечивает 23 часа непрерывной работы. 32 канала, чувствительность 159dBm, частота обновления 1Гц. Использует чипсет MTK MT3318. Поддержка USB и Bluetooth.

Рисунок 11 — GPS-приемник Holux M-1000
В основе устройства лежит чипсет MTK MT3318 с 32 каналами приема сигналов со спутников, а чувствительность приемника достигает 159 dBm, время автономной работы до 23 часов. Передача данных возможна и через Bluetooth и через Holux data cable — через USB порт. Ресивер: L1, 1575.42 мГц C/A code: 1.023 мГц, частота обновления 1 Гц. Имеет встроенную антенну. Чувствительностьсо ставляет 159dBm, Габариты: 65х43 х 17.6 мм, вес менее 53гр. Ионно-литиевая аккумуляторная батарея обеспечивает до 23 часов работы. Рабочая температура от =10 ºC tдо + 60 ºC. Поставляется с ПО Навителл. Holux data cable позволяет согласовать сигналы USB портноутбука с уровнями Rs-232 приемника.
Разработан российский приемник НИИ КП SGK-M, поддерживающий системы ГЛОНАСС и GPS (рисунок 12).
Подключается приемник с использованием USB интерфейса. Число каналов приемника 24, точность определения координат составляет 10 м, точность определения высоты 5 м, время горячего старта составляет 15 с, теплого старта 30 с, холодного старта 90 с. Имеет внутреннюю антенну. Обеспечивает подключение внешнего источника питания 12 В.

Рисунок 12 — Российский приемник НИИ КП SGK-M
2.6 Навигационные системы на основе коммуникаторов и смартфонов
Для навигационных целей широко используются коммуникаторы и смартфоны. Многие смартфоны и КПК имеют GPS-приемники и картографическое ПО, обеспечивая функциональность портативного навигатора. С одной стороны, отпадает необходимость покупки двух устройств, а с другой — дисплеи смартфонов и КПК меньше, да и удобство использования часто оставляет желать лучшего. Тем не менее, эти устройства достаточно широко используются как навигационные аппараты.
При этом они могут иметь собственный GPS-модуль, внешний GPS приемник или использовать используя сотовую навигацию. Одной из наиболее используемых навигационных программ для таких систем является Google Maps. Эта программа стоит по умолчанию в большинстве смартфонов но основе ОС Андроид — причем не важно даже, есть ли у смартфона собственный GPS-модуль. Google Maps с одинаковым успехом работает и с навигационным чипом, и без него, используя сотовую навигацию. Сама по себе программа Google Maps абсолютно бесплатна, но для того, чтобы она в принципе работала, понадобится подключение к интернет. Дело в том, что вся картографическая база Google Maps хранится на удаленном сервере в интернете, и смартфону каждый раз приходится закачивать из сети нужные кусочки. Трафик от этого, конечно, тратится — зато совершенно не тратится место на карте памяти. Интерфейс программы показан на рисунке 13.
Рисунок 13 — Программа Google Maps
Ни прокладку маршрутов, ни, тем более, поддержки пробок в этой программе нет. Она рассчитана на «ручное управление». Зато с картами нет никаких проблем. К примеру, если дорожных развязок для нужного региона еще нет, то можно всегда посмотреть на спутниковый снимок местности.
Программа Nokia Maps — это приложение, разработанное специально для телефонов и смартфонов Nokia, поэтому ни на каких больше аппаратах работать оно не будет. Существует две версии программы — пешеходная и автомобильная, обе можно скачать на официальном сайте компании. После оплаты покупки помимо просмотра карты станут доступны функции ведения по маршруту и голосовых подсказок. Для большинства аппаратов голосовые подсказки сегодня существуют только на английском языке. В базовом режиме программа будет закачивать из интернета кусочки карты, как Google Maps, но при желании можно скачать с сайта и полную картографическую базу. Интерфейс программы показан на рисунке 14.

Карты Nokia Maps
Рисунок 14 — Интерфейс программы Nokia Maps
Навигация с Nokia Maps простая, красивая, но не очень удобная. К пешеходному варианту никаких претензий нет — ведет хорошо, чисто и правильно, и даже всякую экскурсионную информацию порой рассказывает. А вот с автомобильной дела обстоят несколько хуже. Во-первых, у смартфонов Nokia экран достаточно небольшой поэтому и разглядывать на нем карту, и управлять навигационной программой, часто бывает неудобно. Во-вторых, точность карт для многих регионов. Существуют и другие навигационные программы для смартфонов, в том числе и версии Навител.
В настоящее время на рынке России появляются смартфоны с поддержкой как GPS так и ГЛОНАСС. По данным [*] на начало 2013 года на рынке представлены около сотни таких устройств основных производителей, включая Apple, Самсунг, Huawei и ряд других. Самым дешевым двухсистемным аппаратом с поддержкой ГЛОНАСС является смартфон МТС 962, а одним из наиболее удачных моделей является смартфон Huawei Honor (рисунок 1 Приложения Ж).
Для навигации в смартфоне Huawei Honor используется чип gpsOne на платформе Qualcomm. Специального навигационного ПО нет, установлены только программы Google Maps, Navigation и Яндекс.Карты. При желании пользователь может самостоятельно установить любой навигационный софт и превратить смартфон в компактный навигатор.
Заключение
Общее направление модернизации обоих спутниковых систем GPS и ГЛОНАСС связано с повышением точности навигационных определений, улучшением сервиса, предоставляемого пользователям, повышением срока службы и надёжностью бортовой аппаратуры спутников, улучшением совместимости с другими радиотехническими системами и развитием дифференциальных подсистем. Общее направление развития систем GPS и ГЛОНАСС совпадает, но динамика и достигнутые результаты сильно отличаются.
Совершенствование системы ГЛОНАСС планируется осуществлять на базе спутников нового поколения «ГЛОНАСС-М». Этот спутник будет обладать увеличенным ресурсом службы и станет излучать навигационный сигнал в диапазоне L2 для гражданских применений.
Однако развитие космического сегмента и системы управления не может дать результат без развития конечного сегмента систем. Использование спутниковой навигации многогранно. Наряду с системами отображения картографической информации сюда входит и ряд других применений.
Одним из таких применений является трекинг транспорта. Допустим, у некой транспортной компании есть 20 грузовых автомобилей и каждый ежедневно простаивает в многокилометровых пробках или делает крюки, тогда как возможны другие, оптимальные маршруты, пусть и объездные. Сколько убыточных километров проходит каждая машина в день? В неделю? За год? Сколько бензина сжигает впустую? А если подсчитать убытки транспортных компаний огромной страны. Повсеместное внедрение навигационных технологий способно повысить эффективность работы транспорта — сократить общий пробег, минимизировать холостой, повысить скорость передвижения, ускорить доставку товаров. Экстренные службы — милиция, пожарные, скорая помощь — станут прибывать на вызовы в разы быстрее, чем сейчас.
Конечно, в рамках навигационной системы связь односторонняя: навигатор, как телевизор, просто принимает сигнал. О наших передвижениях никто, кроме нас, знать не будет, если только мы не используем навигацию, встроенную, например, в сотовый телефон и вдобавок не «зарядили» его определенными программами-приложениями. Вот тогда можно отследить наши перемещения.
Спутниковый сигнал (как ГЛОНАСС, так и GPS) абсолютно бесплатен и доступен всем. Другое дело, какие-то платежи придется вносить за некоторые дополнительные сервисы, например сообщения о пробках, передачу данных в охранное агентство. Если эти сервисы требуют подключения к Интернету, за трафик, разумеется, необходимо платить.
Особенностью использования навигационных систем является необходимость постоянного обновления. Устаревает не столько сам прибор, сколько заложенная в него картографическая и попутная информация. Ее обновление не требует замены самого навигатора, но каждый день появляются приборы с новыми сервисными функциями, более удобные и совершенные. То есть навигаторы, как и любая техника, подвержены моральному старению. весь прибор или только обновлять карты.
Происходит постоянное обновление системы. В США 5 января 1999 года объявлено о выделении 400 млн. долл. на модернизацию системы GPS, связанную с передачей C/A-кода на частоте L2 (1222,7 МГц) и введением третьей несущей L3 (1176,45 МГц) на КА, которые начали запускаться с 2005 года. Сигнал на частоте L2 используется для гражданских нужд, не связанных непосредственно с опасностью для жизни людей. Третий гражданский сигнал на частоте L3 решено использовать для нужд гражданской авиации.
В России продолжается бурное развитие ГЛОНАСС. Несколько компаний в России уже разрабатывают навигационные приемники и функционально законченные навигаторы. Один из таких проектов — создание отечественной полноценной мультимедийной системы, объединяющей спутниковый навигатор с поддержкой ГЛОНАСС, маршрутный компьютер, аудиовидеоцентр, противоугонную систему. Если результат будет успешным, сразу появятся автомобили с с двухсистемной навигацией, которые к тому же получат отечественную мультимедийную электронику на уровне той, что установлена в иномарках среднего и даже премиум-сегмента.
У спутниковой навигации постоянно появляются все новые области применения. Взять, например, трекеры. Это миниатюрное устройство можно положить в портфель сына-школьника, в сумку бабушки-старушки, привязать к ошейнику любимой собачки или засунуть в автомобильную аптечку. После этого на интернет-странице специального сервиса вы сможете в любой момент увидеть на карте, где находится трекер и, стало быть, сам объект, то есть не потеряются ни бабушка, ни сын, ни собака, ни машина. А можно задать зону, и при выходе трекера за ее пределы нас оповестит об этом SMS-сообщение.