
Теория нечетких множеств (fuzzy sets theory) ведет свое начало с 1965г., когда профессор Лотфи Заде (Lotfi Zadeh) из университета Беркли опубликовал основополагающую работу “Fuzzy Sets” в журнале “Information and Control”. Прилагательное «fuzzy», которое можно перевести на русский как нечеткий, размытый, ворсистый, пушистый, введено в название новой теории с целью дистанцирования от традиционной четкой математики и Аристотелевой логики, оперирующих с четкими понятиями: “принадлежит — не принадлежит”, “истина — ложь”. Концепция нечеткого множества зародилась у Заде “как неудовлетворенность математическими методами классической теории систем, которая вынуждала добиваться искусственной точности, неуместной во многих системах реального мира, особенно в так называемых гуманистических системах, включающих людей”.
Системы, основанные на нечетких множествах разработаны и успешно внедрены в таких областях, как: управление технологическими процессами, управление транспортом, медицинская диагностика, техническая диагностика, финансовый менеджмент, биржевое прогнозирование, распознавание образов. Спектр приложений очень широкий — от видеокамер и бытовых стиральных машин до средств наведения ракет ПВО и управления боевыми вертолетами. Практический опыт разработки систем нечеткого логического вывода свидетельствует, что сроки и стоимость их проектирования значительно меньше, чем при использовании традиционного математического аппарата, при этом обеспечивается требуемый уровень работоспособности и прозрачности моделей.истемы спутникового мониторинга ГЛОНАСС нашли широкое применение на автотранспорте, с их помощью можно отслеживать маршрут транспортных средств, их скорость, автоматизировать работу автопарка АТП, планировать перевозки пассажиров и грузов.
1. Спутниковая радионавигационная система Глонасс
1 Общие сведения о системе
Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (Глобальная Навигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения, вектора скорости движения, а также времени космических, авиационных, морских и наземных потребителей в любой точке Земли или околоземного пространства. В настоящее время она состоит из трех подсистем: подсистема космических аппаратов (ПКА), состоящая из навигационных спутников ГЛОНАСС на соответствующих орбитах; подсистема контроля и управления (ПКУ), состоящая из наземных пунктов контроля и управления; аппаратуры потребителей (АП).
По «Управление экспулатационной работой»
... выполняются параллельно. Лимитирующей операцией, как правило, является технический осмотр, поэтому в курсовом проекте предлагается определить нормы времени только на технический осмотр состава. Продолжительность ... правило, короткие пути , расположенные так ,чтобы обеспечить подачу вагонов к пунктам местной работы и другим пунктам , не прекращая маневры по расформированию , формированию составов. В ...
Считается, что возможности существенного повышения точности навигационных определений связаны с созданием глобальной системы отсчета, использующей самоопределяющиеся навигационно-геодезические спутники без привлечения измерений с поверхности Земли.
Система ГЛОНАСС с полностью развернутой группировкой НС характеризуется вероятностью обеспечения навигационных определений не хуже 0,947 в непрерывном навигационном поле. Точностные характеристики определения плановых координат, высоты и времени равны соответственно 30 м, 30 м и 1 мкс, а доступность системы — 0,98).
Частотно-временное обеспечение реализуется системой синхронизации ГЛОНАСС, которая обеспечивает формирование единой системной шкалы времени, синхронизацию БШВ (бортовых шкал времени) каждого с СШВ. расчет частотно-временных поправок (ЧВП).
определение расхождения СШВ относительно шкалы Государственного эталона координированного всемирного времени UТС (SU), расчет поправок к СШВ, закладку поправок на борт НС (дважды в сутки) для передачи их потребителям в составе навигационного сообщения.
Частотно-временные поправки рассчитывают на каждом витке НС в виде двух параметров линейной аппроксимации расхождения БШВ относительно НС на тридцати — (шестидесяти) минутном интервале и закладываются дважды в сутки (ориентировочно каждые 12 ч) на борт каждого НС. Шкала времени каждого спутника ГЛОНАСС может эпизодически подвергаться коррекции с целью того, чтобы отличие этой шкалы от шкалы времени центрального хронизатора не превышало + 1 нс. В этом случае и течение времени, необходимого наземному комплексу для проведения сверки и формирования поправок, в навигационном сообщении передаются признаки, запрещающие использование лого спутника для целей навигации. Шкала системного времени в ГЛОНАСС корректируется одновременно с коррекциями на целое число секунд шкал UТС (SU), проводимыми Службой Всемирного времени. Коррекции шкал UTС необходимы для их согласования с астрономической шкалой UT1 всемирного времени. Указанная коррекция СШВ ГЛОНАСС осуществляется в 00 ч 00 мин 00 с в полночь с 30 июня на 1 июля или с 31 декабря на 1 января. О планируемом проведении секундной коррекции СШВ ГЛОНАСС сообщается заблаговременно.
Наземный сегмент системы ГЛОНАСС — подсистема контроля и управления, предназначена для контроля правильности функционирования, управления и информационного обеспечения сети спутников системы ГЛОНАСС, состоит из следующих взаимосвязанных стационарных элементов: центр управления системой ГЛОНАСС; центральный синхронизатор; контрольные станции; система контроля фаз; квантооптические станции; аппаратура контроля поля.
Наземный сегмент выполняет следующие функции:
- проведение траекторных измерений для определения и прогнозирования и непрерывного уточнения параметров орбит всех спутников;
временные измерения для определения расхождения бортовых шкал времени всех спутников с системной шкалой времени ГЛОНАСС, синхронизация спутниковой шкалы времени с временной шкалой центрального синхронизатора и службы единого времени путем фазирования и коррекции бортовых шкал времени спутников формирование массива служебной информации (навигационных сообщений), содержащего спрогнозированные эфемериды, альманах и поправки к бортовой шкале времени каждого спутника и другие данные, необходимые для формирования навигационных кадров передача (закладка) массива служебной информации, в память ЭВМ каждого спутника и контроль за его прохождением
Управление техническими системами Навигационные системы в автомобильной отрасли
... самих спутников. Для контроля орбит и координат спутников существуют четыре наземных станции слежения, системы связи и центр управления, ... до спутника. Одной из основных технических сложностей описанного выше метода является синхронизация часов на спутнике и ... погрешности, искусственно вносимой в спутниковые сигналы для неточной работы гражданских GPS-приемников. С этого момента любительский терминал ...
контроль по телеметрическим каналам за работой бортовых систем спутников и диагностика их состояния контроль информации в навигационных сообщениях спутника, прием сигнала вызова ПКУ управление полетом спутников и работой их бортовых систем путем выдачи на спутники временных программ и команд управления; контроль прохождения этих данных; контроль характеристик навигационного поля определение сдвига фазы дальномерного навигационного сигнала спутника по отношению к фазе сигнала центрального синхронизатора
планирование работы всех технических средств ПКУ, автоматизированная обработка и передача данных между элементами ПКУ.
Центр управления системой соединен каналами автоматизированной и неавтоматизированной связи, а также линиями передачи данных со всеми элементами ПКУ, планирует и координирует работу всех средств ПКУ на основании принятого для ГЛОНАСС ежесуточного режима управления спутниками в рамках технологического цикла управления. При этом ЦУС собирает и обрабатывает данные для прогноза эфемерид и частотно-временных поправок, осуществляет с помощью, так называемого, баллистического центра расчет и анализ пространственных характеристик системы, анализ баллистической структуры и расчет исходных данных для планирования работы элементов ПКУ.
Центральный синхронизатор, взаимодействуя с ЦУС, формирует шкалу времени ГЛОНАСС, которая используется для синхронизации процессов в системе, например, в системе контроля фаз. Он включает в свой состав группу водородных стандартов.
Контрольные станции (станции управления, измерения и контроля или наземные измерительные пункты) по принятой схеме радиоконтроля орбит осуществляют сеансы траекторных и временных измерений, необходимых для определения и прогнозирования пространственного положения спутников и расхождения их шкал времени с временной шкалой ГЛОНАСС, а также собирают телеметрическую информацию о состоянии бортовых систем — спутников. С их помощью происходит закладка в бортовые ЭВМ спутников массивов служебной информации (альманах, эфемериды, частотно-временные поправки и др.), временных программ и оперативных команд для управления бортовыми системами.
Траекторные измерения осуществляются с помощью радиолокационных станций, которые определяют запросным способом дальность до спутников и радиальную скорость. Дальномерный канал характеризуется максимальной ошибкой около 2…3 м. Процесс измерения дальности до спутника совмещают по времени с процессом закладки массивов служебной информации, временных программ и команд управления, со съемом телеметрических данных со спутника.
Определение параметров движения спутника производится по запросным измерениям дальности и радиальной скорости в два этапа. На первом этапе определяют параметры движения спутника по измерениям радиальной скорости с последующей переработкой этих измерений с использованием уточненных по ним начальных условий движения. На втором этапе вычисляют параметры движения спутника по измерениям дальности и радиальной скорости.
Решение проблемы высокоточных определений орбит возможно при, создании высокоточных математических моделей движения и измерений, на точность которых влияют следующие факторы: геофизические, определяемые погрешностью задания системы координат и гравитационного поля Земли; геодинамические, связанные с нахождением координат полюса и неравномерности вращения Земли; а также факторы, обусловленные учетом негравитационных возмущений в модели движения.
Организация системы управления воздушным движением
... воздушного движения (управления полетами) текущего времени. При проверках время указывается с точностью до ближайшей половины минуты. 11. Радиотелефонный позывной «контроль» Районный центр единой системы организации воздушного движения ... пункта экипаж ВС до осуществления такого перехода уведомляет диспетчера, на управлении которого он находится 20. Когда на маршрутах определяемыми установленными ...
В основе этих методов лежит понятие согласующих моделей, которые представляют собой системы геофизических параметров и параметров, определяющих математическую модель движения НС по данным обработки навигационных измерений. Такие модели не являются фундаментальными и пригодны только для конкретных орбит, и позволяют при наличии высокоточных измерений параметров движения НС и достаточно полном описании действующих на них сил уменьшить влияние погрешностей определения геофизических и геодинамических факторов на точность определения эфемерид конкретного НС за счет уточнения координат измерительных пунктов, параметров гравитационного поля Земли, параметров вращения Земли и включения координат КС и других параметров согласующей модели в состав расширенного вектора состояний НС.
Спутники ГЛОНАСС размещаются на трех практически круговых орбитах. Высота каждой орбиты составляет 18 840… 19 440 км (номинальное значение составляет 19 100 км), что позволяет отнести ГЛОНАСС к среднеорбитальным СРНС.
Таким образом, орбитальная группировка спутников ГЛОНАСС с несинхронными почти круговыми орбитами более стабильна по сравнению с группировкой спутников СР5 с синхронными 12-тичасовыми орбитами.
Рассмотренная структура орбитальной группировки позволяет обеспечить практически непрерывное и глобальное покрытие земной поверхности и околоземного пространства (включая ближний космос) навигационным полем с заданными характеристиками.
В отличие от сигнала стандартной точности системы GPS в системе ГЛОНАСС не предусматривается его принудительного загрубления, хотя иногда и используется применительно к нему обозначение ПТ-сигнал (сигнал пониженной точности).
Однако имеющиеся более низкие по сравнению с ВТ-сигналом характеристики точности можно отнести к этапу выбора параметров сигнала при разработке системы и не связаны с политикой поставщиков нави рационного обслуживания в системе ГЛОНАСС на этапе ее эксплуатации. В связи с этим всем пользователям ГЛОНАСС доступны измерения координат местоположения и скорости с беспрецедентно высокой (даже по отношению к открытому каналу системы GPS) точностью. В дальнейшем более подробно рассматривается структура и характеристики СТ-сигнала, передаваемого в диапазоне L1.
Контроль целостности радионавигационного поля СРНС заключается в контроле качества излучаемых НС системы навигационных радиосигналов и качества передаваемой ими служебной информации с целью поддержания высокой достоверности навигационных измерений и/или предупреждения потребителей о состоянии системы. Известны несколько способов контроля целостности.
Самоконтроль бортовых систем НС. На спутниках системы ГЛОНАСС осуществляется непрерывный автономный контроль (самоконтроль) функционирования основных бортовых систем. При обнаружении непарируемых нарушений нормального функционирования этих систем, влияющих на качество излучаемого спутником навигационного радиосигнала и достоверность передаваемого навигационного сообщения, на спутнике формируется признак его неисправности, который передается потребителю системы в составе оперативной информации навигационного сообщения. Дискретность передачи такого признака составляет 30 с. Максимальная задержка от момента обнаружения неисправности до момента передачи соответствующего признака не превышает 1 мин. В дальнейшем планируется уменьшить это время до 10 с.
Повышение эффективности управления пассажирскими перевозками ...
... пассажироперевозок - диспетчеризация, контроль, учет и анализ работы пассажирского транспорта, работающего по фиксированным маршрутам и графикам. Спутниковый мониторинг ГЛОНАСС / GPS активно применяется в транспортных компаниях, осуществляющих различные виды пассажирских перевозок (внутригородские, ...
Недостатки этого канала контроля заключаются в его неполноте, например, средства самоконтроля рассчитаны на обнаружение не всех возможных нарушений в работе каждой бортовой системы НС; неисправности самих средств контроля не обнаруживаются и не сопровождаются передачей соответствующего сообщения потребителям; искажение эфемерид не может быть обнаружено на самом НС и т.д.
Наземный контроль. Качество навигационного поля ГЛОНАСС контролируется и специальной аппаратурой из состава ПКУ — аппаратурой контроля поля (АКП).
После соответствующего отказа бортовой аппаратуры спутника АКП обеспечивает формирование признака его неисправности в альманахах системы всех НС не позднее, чем через 16 ч. Дискретность передачи данного признака в служебных сообщениях НС ГЛОНАСС составляет 2,5 мин.
Однако, оба указанных метода контроля целостности навигационного ноля ГЛОНАСС не обеспечивают требуемой полноты проверок и своевременности оповещения потребителей.
1.2 Принцип работы системы контроля автомобилей
спутниковый мониторинг глонасс скаут
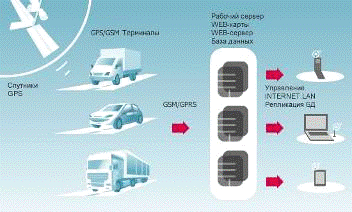
Рисунок 1.1 — Принцип работы системы контроля автомобилей
Контроль автомобиля предполагает установку на транспортное средство комплекта бортового оборудования (GPS/ГЛОНАСС/GSM терминал, или GPS/ГЛОНАСС трекер).
/ГЛОНАСС трекер определяет местоположение, скорость, направление движения транспорта, а также состояние подключенных датчиков (уровень топлива, обороты двигателя, его температура и т. п.), положение различных механизмов. Все отчеты о положении объекта и показаниях датчиков (GPS/ГЛОНАСС трекеры) с заданной периодичностью архивируются в энергонезависимой памяти, независимо от наличия соединения с сервером. Это позволяет осуществлять полный контроль над автомобилем.
Связь мобильных GPS/ГЛОНАСС/GSM терминалов (трекер GPS/ГЛОНАСС) с сервером осуществляется по технологии GPRS, что обеспечивает минимальную стоимость эксплуатации системы при наилучшей скорости и гарантирует доставку отчетов на сервер, а значит, и своевременный контроль автомобилей вашего автопарка.
На телематическом сервере, предоставляемом нашей компанией, функционирует база данных (БД), в которой хранятся данные, принятые от GPS/ГЛОНАСС/GSM терминалов.
Диспетчерский Центр представляет собой обычный компьютер, имеющий какой-либо доступ к Internet. На нем, как и на сервере, функционирует БД, в которой хранятся данные о контролируемых автомобилях (за каждым ведется индивидуально).
Периодически осуществляется репликация данных (передача новой информации от серверной БД к диспетчерской).
Автоматизированная система диспетчерского контроля
... инженерными системами. Использование подобных автоматизированных систем, которые бы осуществляли контроль и управление над системой, которая объединяет собранное воедино все имеющееся инженерное оборудование, дает возможность организации слаженной работы всего комплекса. Автоматизированная система диспетчерского контроля предназначена для контроля ...
Такое построение системы контроля за автомобилем позволяет диспетчеру подключаться к Internet периодически и не накладывает требований на скорость подключения. Диспетчер строит маршруты на карте, отчеты о расходе топлива, пробеге, простое и т. д., используя данные из локальной БД, анализирует статистику, принимая решения.
Диспетчерский Центр может быть реализован автономно на стороне Заказчика или на стороне Оператора услуг мониторинга с защищенным доступом через Internet.
1.3 Бортовое оборудование СКАУТ
GSM терминал MT-600
Многофункциональный абонентский GPS/GSM терминал MT-600 (GPS tracker) предназначен для размещения на подвижных объектах. Работая в составе Системы Контроля Автотранспорта и Учёта Топлива, терминал (GPS трекер) передает по каналам GPRS на телематический сервер информацию о местоположении и направлении перемещения объекта, а также данные о состоянии его основных систем (подключенных датчиков).
Компактный блок трекер GPS объединяет в себе: GPS приемник, GSM модуль, контроллер, аккумулятор и флэш-память, GPS и GSM-антенны выносные. Блок может использовать 2 источника питания: основной аккумулятор автомобиля и внутренний резервный аккумулятор. Можно подключать GPS трекеры как к штатным датчикам автомобиля, так и к специализированным внешним устройствам.
Потребительские характеристики модуля мониторинга GPS/GSM МТ-600:
- Современный 50-ти канальный GPS приемник с высокой чувствительностью, обеспечивающий работоспособность модуля в условиях плотной застройки, сложного рельефа местности и наличия помех.
- Возможность подключения внешнего ГЛОНАСС приемника.
- Широкий диапазон напряжения питания (10 — 36 В), встроенная защита от перенапряжения и помех.
- Встроенная защита автомобильного аккумулятора от разряда.
- Использование технологий SMS и GPRS для связи с сервером системы и диспетчером.
- Наличие энергонезависимой памяти на 160 тысяч записей (до трех месяцев работы вне зоны покрытия GSM оператора).
- Возможно подключение до 4 аналоговых, до 8 дискретных, до 4 частотных или импульсных датчиков.
- Два дискретных выхода для управления блокировкой двигателя и другими устройствами.
- Встроенный датчик вскрытия терминала.
- Наличие встроенного аккумулятора обеспечивает автономную работу навигационного блока до 10 часов.
- Корпус и внешние разъемы специально сконструированы для удобного монтажа и опломбирования.
- Возможность удаленного изменения конфигурации и обновления встроенного программного обеспечения через GPRS и SMS.
- Встроенная индикация для отображения режимов работы и диагностики.
Комплект поставки МТ-600:
- Навигационный блок МТ-600
- Антенна GPS
- Антенна GSM
- Комплект проводов с разъемом для подключения
1.4 Возможности системы СКАУТ ГЛОНАСС
Система спутникового мониторинга С.К.А.У.Т. позволяет контролировать передвижения транспорта, его местонахождение в режиме On-Line. Данные об объекте поступают к диспетчеру системы мониторинга транспорта с задержкой не более 10 секунд. Данные о текущем местонахождении, скорости и курсе движения транспорта фиксируются системой не реже установленного времени (от 5 секунд и выше) а также при изменении курса (совершение поворотов) и изменении показаний дискретных или аналоговых датчиков.
Разработка приложений
... операционную систему iOS. Практическая часть курсовой работы написана на языке Swift, вышедшем в 2014 году, как замена Objective-C. Надо отметить, что разработка на Objective-C все ... на устройстве. В настоящее время существует два языка программирования, которые используются для разработки приложений на данной платформе: Objective-C и Swift. Возможно использование и других языков, ...
На карте диспетчер может видеть значки автомобильных средств, это их текущее местоположение. При движении иконка объекта автоматически поворачивается по направлению движения. При стоянке используется знак “P” (парковка).
Кроме местонахождения, во вкладке “Текущие данные” выведена информация о скорости, местоположении (адрес ближайшего здания, населенный пункт или название пользовательской «зоны»), состояние дискретных датчиков и показания аналоговых датчиков (уровень топлива, температура).
Одна из основных задач системы мониторинга автотранспорта — контроль маршрута. В системе СКАУТ применено множество методов для оптимизации этой задачи:
- удобство отображения маршрутов транспорта на карте;
- при построении маршрута карта масштабируется таким образом, чтобы был виден весь маршрут;
- мгновенно указывается пробег транспорта за назначенное время;
- в зависимости от масштаба информация указывается так, чтобы не мешать пользователю;
- осуществляя контроль маршрута транспорта, диспетчер имеет возможность отображения только нужной информации, для этого достаточно кликнуть на необходимых сведениях (дата, время, скорость и др.);
- стоянки отмечаются знаком “P” и подписываются необходимыми сведениями (номер стоянки, ее длительность, время начала и конца стоянки по желанию и др.);
- для удобства интегрированы карты GoogleMaps;
- диспетчер может выбрать один из трех видов отображения стоянок;
- Строит отчет по скорости Ваших автомобилей.
Позволяет определяет время и место превышения пороговой скорости.
1.5 Преимущества системы спутникового мониторинга СКАУТ
система on-line мониторинга текущего местоположения любого количества автомобилей с периодом опроса каждого автомобиля от 10 секунд. Система диспетчеризации транспорта использует высококачественные векторные электронные карты с точной привязкой к системе координат. Помимо местоположения автомобилей, мониторинг автопарка позволяет диспетчеру получать информацию о текущем состоянии датчиков и исполнительных механизмов.
наличие логгера позволяет сохранять 300 тысяч записей с информацией о местоположении, скорости, показании датчиков. Диспетчеризация транспорта обеспечивает полный контроль перевозок. Не требуется наличие GSM сети на всем участке маршрута, устойчивость к перегруженности GSM сети в праздничные дни или по другим причинам. После возвращения автомобиля в зону покрытия GSM оператора, вся информация о перемещениях автомобиля и о состоянии датчиков передаётся на сервер со скоростью около 500 отчетов в минуту. В отличие от других систем GPS мониторинга автопарка, диспетчер мгновенно получает всю информацию, не покидая своего рабочего места.
распределенная система диспетчеризации автопарка. Система GPS GPRS мониторинга СКАУТ позволяет организовать независимые диспетчерские рабочие места, расположенные на любом удалении друг от друга (полная диспетчеризация транспорта).
При этом каждый диспетчер может осуществлять полный или частичный контроль перевозок, то есть контролировать все или только некоторые автомобили из автопарка. Диспетчерское рабочее место может быть мобильным: ноутбук с доступом к Internet через GPRS в мобильном телефоне.
Разработка датчика мгновенных температур с диапазоном измерений от 0 до 100 С°
... курсовой работе приведен расчет погрешностей проектируемого датчика. В данной курсовой работе 39 страница, 8 таблиц, 10 рисунков, 1 приложение. Аннотация Конструкция датчика мгновенных температур. На рис 1. Показана упрощенная конструкция датчика мгновенных температур, ... Pins 17 Operating Temperature Range -40…+150 ºС Output Current 5mA Output Type Digital Тип корпуса 16-LFCSP Выходной интерфейс SPI ...
система контроля расхода топлива. Точное измерение пробега, обнаружение сливов, заправок, подсчет среднего расхода на 100 км. Опыт внедрения системы GPS мониторинга автопарка (GPRS мониторинг) СКАУТ показывает, что водители приписывают от 30 до 60 % пробега. Система спутникового слежения СКАУТ (диспетчеризация транспорта) позволяет диспетчеру, осуществляющему контроль перевозок, получать показания датчиков и выводить графически уровень топлива в двух различных баках.
Решаемые задачи:
§ автоматизация работы автопарка ПАТП и АТП
§ оперативное управление автопарком ПАТП и АТП
§ планирование перевозок пассажиров
§ подведение итогов работы ПАТП и АТП
Эффект от внедрения:
§ обеспечение безопасности движения пассажирского автотранспорта
§ повышение качества обслуживания пассажиров
§ повышение эффективности использования подвижного состава пассажирского автотранспорта
§ повышение производительности труда работников, занятых пассажирскими перевозками
Система контроля транспорта и учета топлива «СКАУТ» является системой дистанционного GPS/ГЛОНАСС мониторинга от одного до нескольких сотен транспортных средств. Это полноценный GPS контроль движения транспорта по основным параметрам. Системы контроля транспорта позволят вам оперативно анализировать работу транспортного отдела, что станет лучшим решением задачи обеспечения безопасности грузоперевозок. Спутниковая система контроля транспорта помогает более эффективно управлять любым автопарком и легко оптимизировать издержки, связанные с его содержанием.
Система контроля за транспортом СКАУТ обеспечивает:
- слежение, управление и анализ текущего состояния контролируемых объектов;
- контроль транспорта — соблюдения режимов работы;
- повышение эффективности использования транспортных средств и специальной техники;
- предотвращение возможности хищения топлива;
- снижение затрат на ремонт транспорта;
- выявление недобросовестных работников;
- повышение эффективности планирования маршрутов и безопасности грузоперевозок;
- накопление и систематизация всей информации в базе данных.
Система GPS/ГЛОНАСС контроля транспорта СКАУТ осуществляет контроль за транспортом по следующим параметрам:
- текущее местоположение;
- пройденный маршрут по заданным контрольным точкам;
- скорость движения;
- факт включения зажигания;
- количество топлива в баках;
- путевой расход топлива;
- расход топлива, его заправки и сливы;
- загруженность, положение механизмов (для спецтехники), открывание дверей, капота, опрокидывание кузоваи т.
д;.
время движения;
- время и места стоянок;
- обороты двигателя;
- количество моточасов;
- подключение «тревожной кнопки»;
- управление исполнительными устройствами;
- направление движения механизмов (напр. вращение бочки АвтоБетоноМиксера);
- наличие пассажиров в автомобиле. /ГЛОНАСС системы контроля транспорта также позволяют:
- отобразить маршруты подотчётных объектов за любой период времени;
- отобразить на карте положения транспортных средств в текущий момент времени (on-line контроль транспорта);
- сохранять всю информацию в локальной базе данных системы GPS/ГЛОНАСС контроля движения транспорта, позволяющей не иметь постоянное подключение к Internet;
- сохранять всю информацию в течение трёх месяцев при выходе транспорта из зоны действия сети GSM;
- составлять путевые листы в привычной форме и хранить их в базе данных;
- составлять отчеты о посещении объектов и автоматически сопоставить их с путевыми листами;
- составлять табличные и графические отчеты по расходу топлива, пробегу, скорости, времени в пути и т.
д. за любой период по каждому транспортному средству или водителю;
Многофункциональное устройство контроля доступа в помещение на ...
... Обзор существующих решений 2. Разработка схемы устройства 3. Выбор необходимых компонентов 4. Задание алгоритма работы 5. Создание программы работы устройства 6. Изготовление макета ... Исходя из вышесказанного, разработка многофункционального устройства контроля доступа в помещение на микроконтроллерном управлении является актуальной задачей. Целью данной работы является: изготовление действующего ...
- сохранять отчеты в более 25 видах популярных форматов (pdf, word, excel, html и т.д.) и напрямую выводить на печать.
2. Разработка экспертной системы выбора типа подвижного состава для пассажирских перевозок (Fuzzy Logic)
Logic — это пакет прикладных программ, входящих в состав среды MATLAB. Он позволяет создавать системы нечеткого логического вывода и нечеткой классификации.
1 Анализ входных и выходных параметров задачи
В этом пункте мы должны показать путь, по которому мы будем двигаться, для того чтобы решить поставленную задачу. Нужно знать, что при решении любой задачи, имеются исходные данные, а в конце должен появиться ответ. Исходными данными будут являться входные параметры, а результатом станет какой-то выходной параметр. Сочетание выбранных входных факторов должно полностью описать и обосновать выходной. Программа и алгоритм должен быть составлен логически четко.
Для решения поставленной задачи необходимо определить перечень входных факторов. Хочется сразу же отметить, что перевозки будут осуществляться в черте города, что немного сузит разнообразие типов подвижного состава (например, автоматически исключаются поезда и электрички).
Для определения перечня входных факторов я воспользовалась учебником «Пассажирские автомобильные перевозки» под редакцией М.Д. Блатнова. В итоге я решила использовать три входных параметра:
Стоимость перевозки (руб/10км)- безусловно относится к главным факторам, т.к общество в целом находится на разных ступенях стратификационной лестницы. Кто-то может позволить всё, кто-то- ничего. Разумеется, если человек пенсионер, то он поедет на муниципальном транспорте, на который у него есть льготы, или проезд на котором дешевле, чем скажем на маршрутном такси. Т.к. мы договорились, что будем рассматривать городские перевозки, то нам нужна средняя его продолжительность. По данным на 1973 год продолжительность городского маршрута составляла около 7-ми километров — примем 10 км. Тогда стоимость перевозки будет измеряться в руб./10км. И примем диапазон стоимости перевозки в интервале от 1рубля до 40. Т.к пенсионер, пользующийся муниципальным транспортом, при покупке проездного билета тратит на поездку не более чем 1 руб. (в зависимости от кол-ва поездок), а скажем бизнесмен, владеющий личным джипом, может потратить на такую поездку, к примеру 40 рублей.
1) Удобство пользования (2-5 баллов)- тоже важный входной фактор, человек может воспользоваться как удобным так и не удобным транспортом. Приведем пример: человек рано утром едет на работу. У него есть множество вариантов 1. он едет на автобусе или троллейбусе, но как мы знаем, в утренние часы имеется множество желающих уехать вместе с ним. И в итоге мы видим битком набитые автобусы, из которых постоянно доносятся чьи-то возгласы, что его придавили, ему неудобно, или просто просьбы не прикасаться к кому-либо. 2.человек едет на маршрутном такси- он тратит больше денег, но экономит свои нервы, у него после поездки чистая обувь, да и времени уходит меньше.
2) Средняя скорость на маршруте — важный входной фактор. Приведу пример: поездка на автобусе общего пользования Центр — Энергетики протекает примерно 40 минут, а на такси вы доедете за 15- хороший компромисс для тех к кому можно применить поговорку время — деньги! По диапазону средняя скорость будет меняться от 20 до 60 км/час.
Проанализировав входные факторы, и сопоставив их со своими интересами, мы можем выделить и выходной. Им будет являться тип (разнообразие подвижного состава или проще то или иное транспортное средство).
Сделаем больший уклон на автобусы, т. к. в нашей стране этим транспортом пользуются 85 % россиян.
Выходной фактор:
Тип транспорта
Термы:
1) Автобусы большой вместимости (35-50 чел)
2) Автобусы средней вместимости (20-35 чел)
Автобусы малой вместимости (10-20 чел)
Личные автомобили и такси (до 8 чел включая водителя)
А теперь о каждом терме (группе) подробнее.
— Автобус большой вместимости — к этой группе мы отнесем автобусы типа ИКАРУС, ЛИАЗ, ЛАЗ и весь троллейбусный парк города. Большинство подвижного состава этой группы принадлежит МПГПТ, проезд на них отличается низкой ценой билета 1-8 рублей, они являются неудобными для пользования (т.к большинство из них было сконструировано еще в 50-х годах прошлого столетия) поставим 2, и скорость у них разумеется самая низкая 20-30 км/ч.
— Автобусы средней вместимости — к этой группе мы отнесём атобусы типа КАВЗ, ПАЗ, Зил — Бычок. Большинство этих автобусов являются маршрутными такси, но есть среди них и муниципальный транспорт. Не сказать, что автобусы этой группы отличаются удобством от 1й группы поставим 3, но в скорости должны выигрывать (средняя скорость 30-40 км/ч), а в цене на билет — проигрывают (10 руб).
— Автобусы малой вместимости- в большинстве своем это ГАЗели. Проезд на них стоит не ниже 8 рублей, удобство оценим 4, средняя скорость вполне высокая 40-50 км/ч на маршруте. Являются самым опасным средством передвижения из всей выходной группы, не удобная посадка, зато водитель может остановить автобус вне остановочных пунктов.
-Лиичные автомобили и такси — в эту группу можно добавить и служебные легковые автомобили. По скорости и удобству эта группа является неоспоримым лидером 50-60 км/ч и 5 соответственно, но по стоимости они будут являться самым дорогим транспортом (поездка по городу от 15 до 50 рублей).
Эта группа в настоящий момент набирает свою мощность, количество легкового парка города неуклонно растет. Отнесем эту группу транспортных средств к более состоятельным гражданам, а средний человек пользуется ей чаще всего по нужде.
Определим базу знаний для оценки и выбора типа подвижного состава:
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is NEUDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is BOLSHOY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is NEUDOBNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is BOLSHOY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is NEUDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is NEUDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is UDOBNO) and (SKOROST is OCHEN- NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is UDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is UDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is UDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is OTLICHNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is OTLICHNO) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is OTLICHNO) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is SREDNE) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is BOLSHOY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is SREDNE) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is BOLSHOY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is SREDNE) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is SREDNE) and (SKOROST is SREDNAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SAMAYA-NIZ) and (UDOBSTVO is SREDNE) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is BOLSHOY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is VISOKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is SREDNE) and (SKO If (STOIMOST is NIZKAYA) and (UDOBSTVO is SREDNE) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is SREDNIY);
- SKOROST is SREDNAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is SREDNE) and (SKOROST is SREDNAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is NIZKAYA) and (UDOBSTVO is SREDNE) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is NEUDOBNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is NEUDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is NEUDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is NEUDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is UDOBNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is UDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is UDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is OTLICHNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is OTLICHNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is OTLICHNO) and (SKOROST is NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is OTLICHNO) and (SKOROST is SREDNAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is OTLICHNO) and (SKOROST is VISOKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is SREDNE) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is SREDNE) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is SREDNE) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is SREDNE) and (SKOROST is VISOKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is SREDNE) and (UDOBSTVO is SREDNE) and (SKOROST is VISOKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is SREDNIY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is MALIY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is NEUDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is SREDNIY) and (SKOROST is NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is SREDNIY) and (SKOROST is NIZKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is SREDNIY) and (SKOROST is NIZKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is SREDNIY) and (SKOROST is VISOKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is NIZKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is SREDNAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is UDOBNO) and (SKOROST is VISOKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is OCHEN-NIZKAYA) then (OUTPUT is MALIY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is NIZKAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is SREDNAYA) then (OUTPUT is LEGKOVOY);
- If (STOIMOST is VISOKAYA) and (UDOBSTVO is OTLICHNO) and (SKOROST is VISOKAYA) then (OUTPUT is LEGKOVOY);
2 Реализация системы выбора типа подвижного состава в пакете Fuzzy Logic
Запустим MathLab и для загрузки основного fis-редактора наберем «fuzzy» в командной строке. После чего откроется новое графическое окно (Окно редактора FIS Editor).
Программа автоматически создала безымянный файл, и выбрала систему типа mandani, также программа автоматически добавила один входной параметр и один выходной, и присвоила им имена соответственно input 1 и output 1. Для реализации выбора типа подвижного состава добавим еще два входных параметра для моей задачи, т.к. входных параметров, определяющих тип подвижного состава — три, для этого в меню Edit выберем Add Variable… input 2 раза, после чего получим:
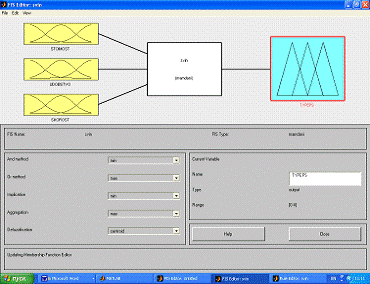
Рисунок 2 — Ввод входных параметров (Stoimost, Udobstvo, Skorost)
Переименуем входные и выходную переменные. Входные (Stoimost, Udobstvo, Skorost) а выходной TYPEPS. Для этого введем имена наших входов и выхода в поле Name, завершив ввод клавишей Enter. И затем перейдем в редактор функций принадлежности, выбрав в меню Edit соответственно пункт Membership functions:
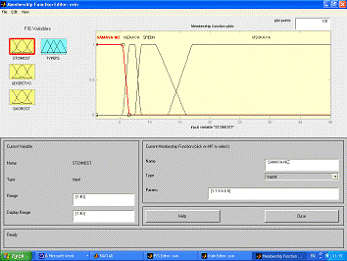
Рисунок 3 — Функции принадлежности переменной STOIMOST
Для лингвистической оценки этой переменной будем использовать 4 терма с трапециидальными функциями принадлежности, для этого выберем из меню Edit команду Add MFs…, и выбираем MF Type — tramf, Number of MFs — 4, затем OK.Также зададим названия термов переменной STOIMOST в поле Name и диапазон изменения этой переменной в поле Range через пробел. Аналогично сделаем для входных переменных UDOBSTVO и SKOROST.
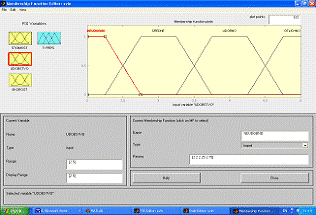
Рисунок 4 — Функции принадлежности переменной UDOBSTVO
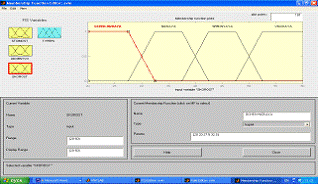
Рисунок 5 — Функции принадлежности переменной SKOROST
Зададим функции принадлежности переменной TYPEPS. Для лингвистической оценки этой переменной будем использовать 4 термов с нелинейными функциями принадлежности. Зададим диапазон изменения переменной POKRYTIE, для этого наберем в поле Range [0 4], затем в меню Edit выберем команду Add MFs… В появившемся окне выбираем 4 терма типа «Gausmf». Переименуем эти четыре терма как «BOLSHOY-A», «SREDNIY-A», «MALIY-A», «LEGKOVOY»:
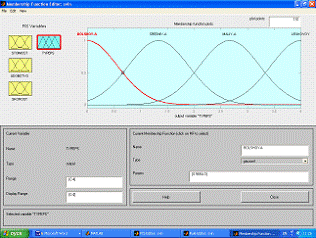
Рисунок 6 — Функции принадлежности выходной переменной TYPEPS
Теперь перейдем в редактор базы знаний Rule Editor, для чего выберем в меню Edit команду dit Rules после этого мы увидим окно, показанное на рисунке 7.
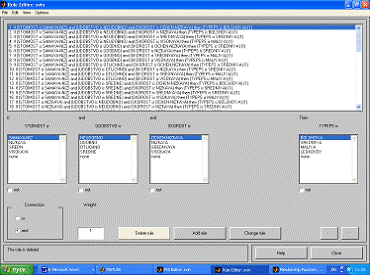
Введем наш набор правил в базу знаний. Для этого необходимо выбрать в меню нужное сочетание команд и нажать Add Rule (добавить правило).
Число, приведенное в конце в скобках представляет собой весовой коэффициент для соответствующего правила. Посмотрим нечеткий логический вывод нашей системы, для этого выберем из меню View команду Rules и посмотрим логический вывод для разных сочетаний входных параметров:
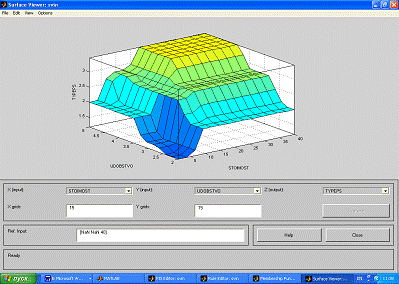
Рисунок 8 — Поверхность «входы (UDOBSTVO, STOIMOST) -выход (TYPEPS)» в Surface viewer
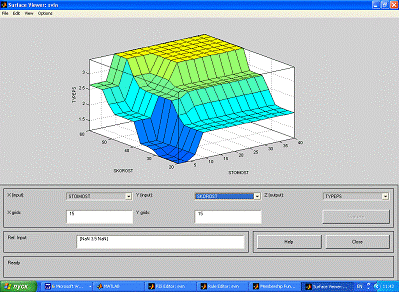
Рисунок 9 — Поверхность «входы (SKOROST, STOIMOST) -выход (TYPEPS)» в Surface viewer
На рисунках 8-10 отображены поверхности нечеткого логического вывода. Проанализируем полученные поверхности. Рассмотрим поверхность со входами UDOBSTVO, STOIMOST (рисунок 8) из графика видно, что при увеличении стоимости проезда и при увеличении оценки удобства наш результат стремится к оценки 4 что соответствует самому дорогому и удобному транспорту — личному легковому автомобилю, а если у меня есть всего 5 рублей на проезд — то выход один идти на остановку и ждать свой троллейбус.
Посмотрим на зависимость скорость-стоимость (рисунок 9).
Из этого графика видно, что в принципе если у вас есть деньги на маршрутное такси, то это вполне не плохой консенсус м/у скоростью и стоимостью.
Рассмотрим зависимость скорость-удобство (рисунок 10).
Из этой зависимости видно, что при возрастании оценки удобства тип подвижного состава меняется от муниципального автобуса до личного транспортного средства, что и характерно для оценки скорости. Из этого графика можно сделать вывод — быстрое транспортное средство — удобное.
Сравнив поставленную цель, и полученный результат мы видим, что данная система работает правильно, это хорошо видно при визуализации нечеткого логического вывода в Rule Viewer (Рисунок 11).
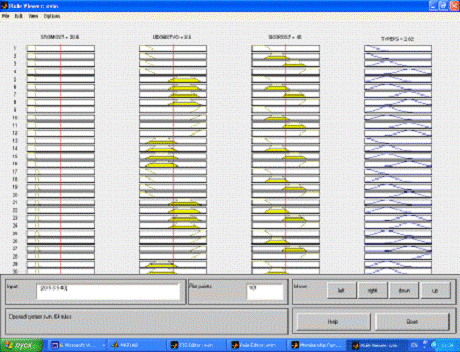
Рисунок 11 — Визуализация нечеткого логического вывода в Rule Viewer
- При малой стоимости (4,99), малом удобстве (2,31), малой скорости (24,1), тип (0,959) подвижного состава для пассажирских перевозок будет: Автобусы большой вместимости (35-50 чел.).
Троллейбусный парк.
- При средней стоимости (20,5), среднем удобстве (3,5), средней скорости (40), тип (2,82) подвижного состава для пассажирских перевозок будет: Автобусы средней вместимости (20-35 чел.).
Маршрутные автобусы (ПАЗ, КАВЗ).
— При большой стоимости (40), большом удобстве (5), большой скорости (60), тип (3,56) подвижного состава для пассажирских перевозок будет: личные легковые автомобили, такси, служебные легковые автомобили (до 8 человек включая водителя).
Заключение
В ходе работы была разработана система выбора типа подвижного состава для пассажирских перевозок. Программа является гибкой для каких — либо изменений. Простота составления и возможность проанализировать правильность своих действий вытекает из графиков зависимостей входных и выходного параметра. Если программа будет составлена логически не четко, то на графике это сразу же отобразится, и мы будем знать об ошибке составленных правил. Результат можно оценить как количественно, так и качественно, увеличить точность. К тому же программы такого рода могут существенно облегчить труд человека на том или ином предприятии.
Система контроля транспорта и учета топлива «СКАУТ» является системой дистанционного GPS/ГЛОНАСС мониторинга от одного до нескольких сотен транспортных средств. Это полноценный GPS контроль движения транспорта по основным параметрам. Системы контроля транспорта позволят вам оперативно анализировать работу транспортного отдела, что станет лучшим решением задачи обеспечения безопасности грузоперевозок. Спутниковая система контроля транспорта помогает более эффективно управлять любым автопарком и легко оптимизировать издержки, связанные с его содержанием.
Список литературы
[Электронный ресурс]//URL: https://inzhpro.ru/kursovaya/avtomatizatsiya-slejeniya-za-gruzami/
1. Методические указания «Информационные технологии на транспорте», Борщенко Я.А.
2. TEXX [Электронный ресурс]. — Режим доступа: http://www.msk-gps.ru, свободный — Загл. с экрана.
— «Пассажирские автомобильные перевозки» под редакцией М.Д. Блатнова. 1973 г. 301стр.