
ДИПЛОМНАЯ РАБОТА на тему: «Методы повышения точности GPS измерений»
РАЗДЕЛ I
ИСПОЛЬЗОВАНИЕ НАВИГАЦИОННЫХ СИСТЕМ ДЛЯ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ
1.1. История развития навигационных систем, структура системы GPS, области применения.
Интенсивное развитие космонавтики позволило создать спутниковые методы определения координат, в которых вместо неподвижных геодезических пунктов используют движущиеся по орбите спутники, координаты которых можно определить для любого момента времени. В настоящее время имеются множество спутниковых навигационных систем:
- российская ГЛОНАСС (Глобальная Навигационная Спутниковая Система);
- американская NAVSTAR, GPS (Navigatton System with Time And Ranging, Global Positioning System);
- европейская спутниковая система Галилео;
- китайская навигационная система Бэйдоу;
- японская региональная навигационная система QZSS.
В конце 70-х в СССР была создана спутниковая навигационная система «Цикада», а в США — система «Транзит». Основными потребителями навигационной информации были военные и флот. На базе этих систем позднее были созданы навигационные системы нового поколения GPS и ГЛОНАСС. Запуск первого американского навигационного спутника системы GPS, NAVSTAR был произведен в 1978 г., российская же система ГЛОНАСС начала формироваться с запуска трех спутников в 1982 г. К этому времени на орбитах вокруг Земли вращалось уже шесть американских спутников. Именно по ним были получены первые впечатляющие результаты геодезический измерений. В 1982 г. в Массачусетском институте технологий (США) была образована исследовательская группа под руководством Чарльза Кунселмана. В нее входили Иегуда Бок, Роберт Кинг, Джеймс Коллинз, Альфред Лейк и др. Эта группа провела испытания прототипа приемника «Макрометр», разработанного Ч. Кунселманом. При статических измерениях базовых линий в сеансах по нескольку часов были достигнуты относительные ошибки, равные (1-2)*10 . Позднее А. Лейк напишет в своей книге: «Это было шоковое открытие. Внезапно появилась измерительная система, способная превзойти точность традиционных первоклассных геодезических сетей».
В течение 1983 — 1984 гг. съемки с приемником Macrometr V-1000 доказали состоятельность GPS технологий. Группой ученых Массачусетского института технологий была создана сеть сгущения 1-го класса из 30 станций в районе Эйфель провинции Северный Рейн-Вестфаллия в Западной Германии. В начале 1984 г. — сеть сгущения в округе Монтгомери (штат Пенсильвания, США).
Системы спутникового мониторинга Глонасс на автотранспорте
... перевозки пассажиров и грузов. 1. Спутниковая радионавигационная система Глонасс 1 Общие сведения о системе Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (Глобальная Навигационная Спутниковая Система) предназначена для ... и геодинамических факторов на точность определения эфемерид конкретного НС за счет уточнения координат измерительных пунктов, параметров гравитационного поля Земли, ...
В обоих случаях точность измерений была на уровне 10 — 2 при длинах около 10 км и превышала точность существующих сетей.
В 1984 г спутниковая технология была использована в Станфордском университете (Калифорния) при создании высокоточной инженерной сети для строительства линейного ускорителя. Обычные измерения углов и расстояний были объединены с GPS наблюдениями базовых линий. При этом была достигнута миллиметровая точность, подтверждения сравнением с лазерным трассированием ускорителя, воспроизводившим прямую линию до 0,1 мм.
В 1984 г. Бенджамин Ремонди изложил теоретические основы GPS измерений. Им же была разработана технология кинематических измерений. Первый вид измерений стал называться непрерывной кинематикой, а второй кинематикой «стой-иди».
В 1993 г. система GPS была полностью развернута. Затраты на ее реализацию превысили 15 млрд. долларов США. Первоначально обе системы (ГЛОНАСС и GPS) предполагалось использовать при решении навигационных задач в основном для военных целей, но исследования показали возможность их геодезического применения, т. е. для определения координат с высокой точностью; m = 5 мм + D * 10 , где D — расстояние в км между опорной (с известными координатами) и определяемой точками; m — средняя квадратическая ошибка определения приращений координат.
Российская система ГЛОНАСС начала формироваться с 1982 г. и все еще находится в стадии комплектации спутниками. Ее использование для целей геодезии активизировалось посте ее регистрации в международных организациях а 1988 г. Почти сразу после этого в университете г. Лидса (Англия) был создан кодовый приемник работающий и по GPS и по ГЛОНАСС.
Успех радионавигационных систем в их широкомасштабном использовании полностью заключается в революции, которую произвело внедрение интегральных схем. Это сделало приемники легкими, компактными и на порядок дешевле. Первые GPS приемники, предназначенные для спутникового позиционирования, были введены в середине 1980-х гг. и стоили более $100 000. Сейчас приемники с намного более высокими возможностями стоят менее $10 000. В конце 1980-х гг. только надеялись, что производители GРS приемников смогут производить их для массового рынка хотя бы за $2 000. Однако ценовые барьеры упали довольно быстро. Уже в 1992 г. был изготовлен ручной GРS приемник, который стоил меньше $1 000. В 1997 г. GPS индустрия взяла ценовой барьер $100, предложив карманный приемник. В 2000 г. ручные часы с GPS приемником стоили всего $500.
В настоящее время на рынке находятся сотни моделей приемников. Считается, что с 1997 г. ежегодно производится более миллиона приемников. По оценкам Министерства торговли США, объем продажи аппаратуры и услуг с GPS в 2003 г. превзойдет $16 000 000 000. Спутниковые системы становятся частью нашей повседневной жизни и существенным элементом коммерческой и общественной инфраструктуры. За последние 20 лет было произведено несколько поколений приемников, основанных на все более новых технологиях.
Таблица 1
Первые геодезические GPS приемники
|
Название |
Изготовитель, год |
Наблюдения |
Размеры, масса |
|
|
фаза |
код |
|||
|
Macrometer v-1000 |
«Матрометрикс»,Litton Aero Service, 1982 |
L1 |
беско-довый |
69 *53* 64 см, 45 кг; антенна 91*91*16 см, 16 кг |
|
Т1-4100 |
«Тексас Инструментс, 1982 |
L1,L2 |
P |
38*46*20 см, 25 кг; антенна 28*18, 2кг |
Составные части навигационной системы GPS
Систему навигационной системы GPS можно разделить на три сегмента:
1. Космический сегмент (искусственные спутники земли).
2. Сегмент управления (сеть наземных станций управления и контроля).
3. Пользователи (потребители).
Космический сегмент . В систему спутников должно входить 24 действующих ИСЗ и 4 запасных, которые вращаются вокруг Земли на орбите на высоте примерно 20200 км. Время одного полного оборота спутника вокруг Земли – 12 часов. Запасные спутники позволяют оперативно заменить спутник, который вышел из строя. Орбиты спутников выбраны так, чтобы с любого пункта Земли можно было принимать сигналы не менее, чем с 4 спутников. Спутники системы постоянно усовершенствуются и поэтому их делят на несколько блоков.
Первый спутник системы выведен на орбиту в феврале 1978 г. Он принадлежит к 1-му блоку, последний из которых запущен в августе 1985 г. Десять спутников этого блока вращались в трех орбитальных плоскостях с наклоном 63 . Их масса составляет 845 кг. Несколько спутников этого блока еще является действующими.
В 1989 – 90 гг. на орбиту вывели девять спутников второго блока. Их масса составляет 1500 кг. Проектная продолжительность функционирования одного спутника составляет 7,5 года. Плоскости орбит ИСЗ этого и последующих блоков наклонены к плоскости экватора под углом 55 .
На орбите каждой из плоскостей должно вращаться на равных расстояниях по 4 спутника. Начиная со второго блока все ИСЗ имеют устройства, которые позволяют создание сигналов.
Каждый спутник второго и последующих блоков имеет индификатор, который состоит из одной буквы, который обозначает плоскость орбиты (А, В, C, D, E, F) и цифры которая определяет положение спутника на орбите (1, 2, 3, 4).
Так первый спутник второго блока имеет идентификатор Е1. Кроме этого используют индификаторы, которые являются порядковыми номерами запуска спутников системы.
С 1990 г. по 1994 г. произведено запуски пятнадцати следующих спутников второго блока, который обозначают II А. Эти спутники могут поддерживать между собой связь, а на некоторых из них установлены отражатели света, что позволяет определить лазерными светодальномерами расстояния до них с поверхности Земли.
Для замены ИСЗ, которые перестали функционировать, необходимо продолжить запуск спутников системы. Поэтому 1995 г. начали выводить на орбиту спутники блока II R. Они постепенно заменяют спутники первого и второго блоков. Проектная продолжительность работы этих спутников 10 лет. В них хронометрам или основным генераторам являются мазерная стабилизация частоты которых на порядок выше, чем генераторов предыдущих спутников и составляет 10-13. Кроме того, они могут выполнять орбитальные наблюдения за другими спутниками. Масса спутников этого блока превышает 2000 кг. Их выводят на орбиту космическими кораблями “Шатл”.
Дальнейшим совершенствованием спутников системы NAVSTAR / GPS идет в направлении оснащения их приборами для инерционной навигации. С начала этого тысячелетия были запущены спутники следующего поколения, т. е. блока IIF.
Передатчики спутников непрерывно излучают колебания двух частот, которые модулированы кодами. Кроме излучения сигналов передатчики передают информацию о своей орбите, а так же о положении других спутников системы и параметры их орбит. Спутники имеют также приемники, которые принимают сигналы от основной станции сектора управления. Они дают информацию об орбите спутников. Траектории спутников можно корректировать с основной наземной станции управления.
Сегмент управления.
- головной центр управления ИСЗ (Master Control Station) который находится в городе Colorado Springs, военная база Шривер.
- три стационарных станции контроля (Monitor Station).
Они находятся на островах Вознесения в северной части Атлантического океана; Диего-Гарсия в Индийском океане и Кваджалей в северной части Тихого океана.
- передвижные контрольные станции.
Станции сегмента управления находятся на поверхности земли на больших расстояниях друг от друга. Они беспрерывно принимают колебания, посылаемые спутниками. Расстояния до спутников определяют через полутора секундные интервалы времени. Затем они усредняются для интервалов времени равных 15 минутам. Кроме этого на станциях ведется метеорологическое зондирование атмосферы по вертикали с целью определения исправлений за атмосферу. Результаты обработки сигналов спутников и вертикального зондирования с контрольных станций передаются головной центр управления. Там вычисляют эфемериды орбит спутников и уравнения их хронометров на 18 часов вперед. Эти данные передаются на ИСЗ, а те в свою очередь передают их наблюдателям, т. е. на приемники системы. Основная станция управления имеет возможность маневрировать двигателями спутников, т. е. корректировать их орбиты.

Рисунок 1. Схема расположения станций сегмента управления GPS.
Наземная часть системы GPS состоит из пяти станций слежения, которые находятся на островах Кваджалейн и Гавайях в Тихом океане, на острове Вознесения, на острове Диего-Гарсия в Индийском океане, а также в Колорадо-Спрингс. В будущем планируется создание еще одной станции наблюдения на мысе Канаверел, шт. Флорида. На всех станциях слежения используются приемники GPS для пассивного слежения за навигационными сигналами всех спутников. Затем информация со станций наблюдения обрабатывается на главной управляющей станции и используется для обновления эфемерид спутников. Кроме этих станций на всей имеются работают частные системы станций слежения ИСЗ. Полученные на них данные используются также для уточнения параметров орбит спутников и получено уравнений генераторов спутников.
Сегмент пользователя. Приемники GPS сигналов. Любой пользователь, имеющий GPS приёмник, может использовать GPS сигналы. В начале, GPS приёмники использовались в основном для определения местоположения и навигации. Теперь GPS приёмники используются для решения разнообразнейших высокоточных задач на земле, в небе и на море.
Области применения навигационных систем
Навигационные системы используются в различных областях. С помощью них можно создавать и обновлять базы данных ГИС для различных дисциплин. В частности они нашли широкое применение в сфере природных ресурсов, развития инфраструктуры и контроля городского хозяйства, сельском хозяйстве и социальных науках. Положение, время и дополнительную информацию можно собирать двигаясь по суше, воде и воздуху над интересующем вас местоположением.
Природные ресурсы. Специалисты работающие в области природных ресурсов, такие как, геологи, географы, лесники и биологи использую GPS картографические системы для записи GPS положений и дополнительной информации об объектах. Например, лесники в качестве дополнительной информации могут регистрировать возраст, состояние, количество и тип леса. Они могут также проводить съёмку территорий подлежащих вырубке или посадке. Биологи имеют возможность регистрировать ареалы расселения диких животных, маршруты их миграций, численность популяций и другую информацию. GPS помогает при сборе данных о типах почв, которые в комбинации с трёхмерными моделями территорий позволяют выделить отдельные слои и аспекты для предсказания областей, требующих специального управления. Кроме того, GPS можно использовать для картографирования местоположения колодцев и других источников воды; записи размеров озёр и их состояния; регистрации ареалов распространения рыбы и диких животных; изменений береговой линии, полевых угодий и климатических зон.
Городское хозяйство. Приложения в сфере городского хозяйства навигационных систем включает в себя контроль транспортных потоков и инфраструктуры коммунального хозяйства. Улицы и проспекты могут быть оцифрованы при перемещении по этим объектам с одновременной записью GPS координат, состояние дорог, опасные участки требующие ремонта. GPS оказывается крайне эффективным при съёмке канализационных, газовых и водных трубопроводах, а также электрических и телефонных линий. Такие объекты как, крышки колодцев и пожарные гидранты картографируются как точки с соответствующей атрибутивной информацией. Аварийные машины и ремонтные бригады могут использовать GPS для навигации непосредственно к месту аварии коммуникаций. Время их прибытия и отправления точно регистрируется, вместе с их комментариями и планом выполнения сервисных работ. Кроме того, с помощью GPS можно выполнять съёмку земельных участков, участков проведения строительных работ, объектов улиц и заводов.
Использование GPS в сельском хозяйстве. GPS картографические системы помогают описывать особенности участков полей находящихся в интенсивном сельскохозяйственном применении. Вы можете точно связать такие характеристики как микроклимат, тип почвы, участки урожая, повреждённые насекомыми или болезнями, объём собираемой продукции и т. п. с их местоположением. Положение трактора или самолёта может быть использовано совместно с данными о типе почвы для выполнения более экономного расхода удобрений или химических распылителей. Это напрямую снижает стоимость затрат на удобрения и уменьшает загрязнение природных водных источников этими веществами. Технология GPS оказывает агрономам существенную помощь в создании баз данных, после анализа которых можно оценить эффект влияния различных методик проведения сельскохозяйственных работ на сбор выращенной продукции.
Применение в сфере социальных наук. Археологи и историки могут использовать картографические GPS системы для навигации и регистрации раскопок и исторических мест. Когда желаемая точка маршрута найдена, в базу данных ГИС записываются исчерпывающие данные по объекту, что позволяет в дальнейшем полностью восстановить картину на определённый момент времени. В качестве примера, можно привести исследования выполненные антропологами в джунглях Венесуэлы. Учёные исследовали “белые пятна” в джунглях и использовали картографические GPS системы для регистрации мест проживания неизвестных местных племён. Местоположения и сопутствующие данные об уровне культурного развития, которые были собраны, помогли в дальнейшем правительственным органам Венесуэлы создать резервации, чтобы сохранить в неприкосновенности уникальный быт местных племён.
Другие области применения. Картографические GPS системы можно использовать в любых приложениях требующих точной временной привязки, положений и другой атрибутивной информации. Конечный результат не ограничивается выводом на карту. Положения объектов и маркеры времени могут быть также переданы в программные пакеты, которым необходима информация для всевозможного моделирования, например создания цифровых моделей местности (ЦММ).
Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в работе милиции и пожарных. На сегодняшний день применение GPS технологий является неотъемлемым в землеустройстве, геодезии, земельном кадастре, строительстве, транспортной сфере, военном деле, гидрологии и геологии и многих других сферах.
1.2.Законодательное обеспечение геодезических работ
1.Земельный кодекс Украины.
Земельных кодекс Украины определяет в общих чертах законодательную основу геодезических работ:
- определяет обязанности организаций, проводящих геодезические работы;
- определяет содержание землеустройства, в том числе и в качестве проведения топографо-геодезических, картографических и других работ;
- содержит определение кадастровых съемок.
2.Закон Украины «О землеустройстве».
- описывает основные термины землеустройства, такие как: виды землеустроительных работ, документация по землеустройству, межевание земель, план земельного участка и др., которые тесно связаны с геодезическими работами;
- раскрывает порядок пользования документацией по землеустройству;
- определяет топографо-геодезические и картографические работы при осуществлении землеустройства;
- определяют основные виды документаций и работ по землеустройству, а также геодезические работы при них.
3.Закон Украины «О топографо-геодезической и картографической деятельности».
Основной закон в сфере топографо-геодезической и картографической деятельности. Раскрывает основные понятия в данной сфере, объекты и субъекты, государственное управление в области топографо-геодезической и картографической деятельности, контроль и ответственность за нарушение законодательства.
4.Закон Украины «О метрологии и метрологической деятельности».
Данный закон определяет правовые основы обеспечения измерений в Украине, регулирует отношения в сфере метрологической деятельности и устремлен на защите граждан и национальной экономики от последствий недостоверных результатов измерений.
5.Закон Украины «О государственной тайне».
В данном законе определены понятия о информации, отнесенной к государственной тайне, о экспертах по вопросам гос. тайны, о сроках действия решений по определению информации к числу государственной тайны, о защите государственной тайны, об ответственности за нарушение законодательства относительно гос. тайны.
6.Закон Украины «Об охране земель».
ст.23 закона говорит о том, что топографо-геодезическая и картографическая деятельность является одним из составляющих комплекса наблюдения за состоянием земель.
7. Инструкция ГКНТА-2.04-02-98 по топографической съемке в масштабах 1:5000, 1:2000, 1:1000 и 1:500
Определяет порядок и технологию создания топографических планов в масштабах 1:500 — 1:5000 для потребностей картографирования относительно их содержания и точности. Инструкция разработана в соответствии с Основными положениями (ГКНТА-1.04-01-93,К, 1993г.) и устанавливает технические требования к геодезической основе, точности, содержанию, методов создания и обновления топографических планов масштабов 1:5000, 1:2000, 1:1000 и 1:500, методики выполнения топографических съемок, а также конкретизирует требования относительно выбора системы координат, высот, масштабов и сечения рельефа в зависимости от назначения топографических планов.
8. Инструкция о порядке приема и контроля топографо-геодезических и картографических работ.
В инструкции изложен порядок проведения контроля, приема и оценки качества топографо-геодезических и картографических работ общегосударственного и специального назначения в предприятиях, организациях и отдельными субъектами предпринимательской деятельности, выполняющих названные работы. Инструкция устанавливает порядок контроля, приема и оценки качества топографо-геодезических и картографических работ общегосударственного и специального назначения, перечень которых приведен в Законе Украины «Про топографо-геодезическую и картографическую деятельность», статьи 11 и 13.
9. ГКНТА-2.07-01-93. Инструкция про условия и правила выполнения аэрофотосъемочных, топографо-геодезических, картографических работ и кадастровых съемок.
Инструкция устанавливает условия и правила проведения аэрофотосъемочных, топографо-геодезических, картографических работ и кадастровых съемок, выдачу субъектам предпринимательской деятельности лицензий на выполнение деятельности, контроля за соблюдением этих правил и определяет порядок рассмотрения и оформления документов Главным управлением геодезии, картографии и кадастра при Каб. Мине Украины. В Инструкции приводятся условия, при которых субъекты предпринимательской деятельности могут быть лишены лицензии, либо приостановлено ее действие, а также продление действия лицензии.
10.СНиП 1.02.07-87. Инженерные изыскания для капитального строительства.
В документе определяются основные положения инженерно-геодезических изысканий, общие требования к проведению данных изысканий, состав и объем изысканий, требования к опорным геодезическим сетям, нивелирным сетям, мензульной съемке, тахеометрической съемке, аэрофототопографической съемке, наземной фототопографической съемке, обновлению топографических планов, требования к геодезическим работам при изучении опасных геологических процессов
11.Основные положения создания топографических планов в масштабе 1:5000, 1:2000, 1:1000 и 1:500. Данным нормативным документом определено назначение топографических планов, проекций, систем координат и высот, розграфки, номенклатур, содержания, точности, геодезической основы топографических планов масштабов 1:5000, 1:2000, 1:1000 и 1:500. Определены также методы создания, обновления и издания планов как в графическом так и в цифровом виде.
12. Основные положения создания и обновления топографических карт масштабов 1:10000, 1:25000, 1:50000, 1:100000, 1:200000, 1:500000, 1:1 000000.
Данный нормативный акт устанавливает общие требования к геодезической основе, точность и содержание топографических карт всех масштабов.
13. Положение об авторских правах в картографии.
Данное положение определяет порядок регулирования правовых отношений, связанных с установлением авторских прав на все виды картографических работ и их использование.
14.О порядке использования аппаратуры спутниковых радионавигационных систем во время проведения топографо-геодезических, картографических, аэрофотосъемочных, проектных, исследовательских работ, изысканий и кадастровых съемок. Данный документ регламентирует порядок использования спутниковых радионавигационных систем.
1.3. Методы и режимы GPS измерений, виды приемников
Методы GPS наблюдений. Определение координат при геодезических измерениях по наблюдениям спутников навигационных систем выполняется абсолютными, дифференциальными и относительными методами. В абсолютном методе координаты получаются одним приемником в системе координат, носителями которой являются станции подсистемы контроля и управления и, следовательно, сами спутники навигационной системы. При этом реализуется метод засечки положения приемника от известных положений космических аппаратов (КА).
Часто этот метод называют также точечным позиционированием. В дифференциальном и относительном методах наблюдения производят не менее двух приемников, один из которых располагается на опорном пункте с известными координатами, а второй совмещен с определяемым объектом. В дифференциальном методе по результатам наблюдений на опорном пункте отыскиваются поправки к соответствующим параметрам наблюдений для неизвестного пункта или к его координатам, то есть наблюдения обрабатываются раздельно. Этот метод обеспечивает мгновенные решения, обычно называемые решениями в реальном времени. В них достигается более высокая точность, чем в абсолютном методе, но только по отношению к опорной станции. В относительном методе наблюдения, сделанные одновременно на опорном и определяемом пункте, обрабатываются совместно. Это основное различие между относительным и дифференциальным методом, которое приводит к повышению точности решений в относительном методе, но исключает мгновенные решения. В относительном методе определяется вектор, соединяющий опорный и определяемый пункты, называемый вектором базовой линии.
Наблюдения в реальном времени (абсолютные, дифференциальные или относительные) предполагают, что полученное положение будет доступно непосредственно на месте позиционирования, пока наблюдатель находится на станции. При пост-обработке результаты получают после ухода с пункта наблюдений.
В каждом из трех указанных методов определений координат возможны измерения как по кодовым псевдодальностям (по фазе кода), так и по фазе несущей. Точность кодовых дальностей имеет метровый уровень, в то время как точность фазовых измерений лежит в миллиметровом диапазоне. Точность кодовых дальностей, однако, можно улучшить, если использовать метод узкого коррелятора или сглаживание по фазе несущей, достигая при этом дециметровый и даже более высокий уровень точности.
Точность дифференциального и относительного метода значительно выше, чем в соответствующих вариантах абсолютного метода, и может достигать сантиметрового и даже более высокого уровня. Однако следует обратить внимание на один момент. Поскольку в этих методах координаты неизвестных пунктов находятся относительно опорного пункта, то погрешности координат этого пункта полностью войдут в координаты определяемых точек, то есть вся развиваемая сеть оказывается смещенной.
В каждом из методов возможны наблюдения в режимах статики и кинематики. При статических наблюдениях оба приемника находятся в стационарном положении относительно Земли, а при кинематическом позиционировании один из приемников является стационарным, а другой — движущимся. Оба приемника одновременно наблюдают одни и те же спутники. Потеря захвата сигнала спутника для статического позиционирования не является настолько важной, как при кинематическом позиционировании. Статическое позиционирование позволяет накапливать данные, добиваясь повышения точности. Относительное позиционирование по фазовым измерениям является наиболее точным методом определения положений и наиболее часто используется геодезистами. Преимуществом кинематического позиционирования является его возможность получать траекторию движения транспортного средства, на котором установлена спутниковая аппаратура.
Виды приемников
Аппаратура потребителя различается по архитектуре, методу действия, назначению, точности, стоимости и другим параметрам. Выделяют три типа приемников с фундаментальными различиями в архитектуре :
- непрерывно наблюдающие приемники;
- медленные последовательные приемники;
- быстрые последовательные приемники.
Непрерывно наблюдающие приемники, называемые также многоканальными, отслеживают 4 или более космических аппаратов (КА) непрерывно, каждый канал наблюдает выделенный ему КА от начала до конца. Это дает непрерывный доступ к навигационному сообщению, принимаемому от каждого спутника. Непрерывные приемники более дорогие, чем два альтернативных типа, но они проще по концепции и могут успешно работать в высоко динамичных военных условиях. Для приемников, работающих по одной СРНС, обычно достаточно 12 каналов, в двухсистемной аппаратуре, работающей по сигналам GPS и ГЛОНАСС, используется не менее 20 каналов для каждой частоты. Медленные последовательные приемники, называемые также приемниками с распределением времени, отслеживают спутники последовательно, задерживаясь на каждом на I — 2 с перед переходом на следующий спутник. Чтобы собрать по каждому спутнику, по меньшей мере, один 30-секундный кадр с потоком данных, он вынужден периодически прерывать последовательность обработки. Эти приемники относятся к наиболее дешевым из всех доступных приемников. Однако они обеспечивают наихудшее время до первой фиксации и не могут наблюдать спутники при движении с большими скоростями. Быстрый последовательный приемник, называемый также мультиплексным приемником, отслеживает четыре или более спутников последовательно, но он задерживается на каждом спутнике на очень короткий интервал. Если такой приемннк переключается между четырьмя спутниками, то он может на каждом из них задерживаться на 1/200 с. Таким образом, он возвращается к каждому спутнику точно в момент захвата следующего бита в его потоке данных, идущих со скоростью 50 бит/с, и таким образом получает постоянный доступ ко всему потоку данных от каждого из четырех спутников. Мультиплексный приемннк может наблюдать больше спутников, чем последовательный приемник. Однако его исполнение все же ниже, чем у непрерывного приемника, потому что он не может объединять все спутники из передаваемого широкого спектра энергии.
По методу действия различают приемники:
- гражданские навигационные приемники, использующие стандартный (С/А — или СТ) код на частоте L1;
- кодовые приемники, со сглаживанием псевдодальности по фазе несущей;
- военные навигационные приемники, использующие Р(У)-код на обеих частотах;
- одночастотные фазовые приемники;
- двухчастотные фазовые приемники.
Кодовые приемники определяют положение, обрабатывая информацию, содержащуюся в коде, который передается спутниками. Преимущество этого метода — в его низкой стоимости. Недостатком является сравнительно низкая точность порядка 5 м или хуже. Применяемое в некоторых типах приемников сглаживание псевдодальностей по фазе несущей позволяет добиваться измерений с точностью порядка 0.5 м.
Фазовые приемники определяют положение путем обработки измерений фазы несущей волны, наблюдаемой в течение некоторого времени. У них не нужно декодировать переданную информацию, за исключением данных о положениях спутников. Некоторые такие приемники не имеют возможности принимать коды вообще, в этом случае приемник должен предварительно загружаться данными из другого источника. Преимущество этого метола — его высокая точность. Такие приемники могут обеспечивать сантиметровый уровень точности даже в реальном времени, когда используются дифференциальные поправки. Их недостаток более высокая стоимость, значительно более сложная обработка измерений, чем у кодовых приемников.
1.4.Ошибки, возникающие при GPS измерениях.
Как и в обычных геодезических измерениях, в GPS технологиях можно выделить четыре основных источника ошибок:
- ошибки наблюдателя (неточное измерение высоты антенны, ошибки центрирования, ошибки в показаниях метеоаппаратуры);
- ошибки аппаратуры, к которым относятся ошибки фазовых и кодовых отсчетов, характеризующих шум аппаратуры, ошибки в измеренных временных задержках или поправках часов как на спутнике, так и в приемнике, нестабильность фазовых центров антенн;
- влияние внешних условий по трассе распространения сигнала (неоднородности тропосферы и ионосферы, многопутность, интерференция, ослабление сигналов из-за препятствий, влияние магнитных бурь);
- ошибки математической обработки (слабая геометрия созвездия спутников, ошибки орбит и априорных координат начала базовой линии, ошибки геофизических моделей или стохастических моделей).
Рассмотрим подробнее основные источник ошибок:
1. Влияние вращения Земли (смещение приемника за время прохождения сигнала).
Координаты ИСЗ в геоцентрической системе координат вычисляют на определенный момент времени. За время t распространения электромагнитных волн от спутника до приемника вследствие вращения Земли сигнал будет принят не в точке 1, а в точке 2. Вследствие этого вместо координат X, У, Z из-за поворота на угол α получим координаты X’, У’; Z’ . Расчет окончательных координат производится по формуле:
![]()
![]()
Влияние вращения земли оказывает незначительное влияние, учет которой необходим при высокоточных измерениях. Максимальной ошибка будет на экваторе, минимальной – на полюсах.
2. Релятивистский эффект. Поправка за релятивистский эффект связана с тем, что основные часы, определяющие шкалу времени системы GPS и часы на спутнике расположены в местах с различными гравитационными потенциалами и перемещаются с различными скоростями. Это обстоятельство приводит к смещению частот генераторов на спутниках. Величина смещения имеет небольшую постоянную компоненту и периодическую компоненту. Постоянная часть учитывается в поправочном коэффициенте часов спутника. Максимальная величина поправки в спутниковые часы равна 70 наносекунд, а дрейф часов — 0,01 наносекунд. Поправка за релятивистские эффекты на спутниках учитываются контрольными станциями. Поправки в часы приемника содержатся в программном обеспечении приемника и вносятся автоматически.
3. Влияние среды распространения сигнала. Плотность атмосферы не постоянно, соответственно и скорость распространения сигнала различна. Основное влияние оказывает ионосфера и тропосфера:
а) влияние ионосферы. Скорость распространения радиосигналов в ионосфере зависит от числа свободных электронов на их пути. Ионосфера обычно имеет спокойное поведение в умеренных широтах, но может флуктуировать вблизи экватора и магнитных полюсов. Район с наивысшей ионосферной задержкой лежит в пределах ±20° от магнитного экватора. Солнечные вспышки и последующие магнитные бури могут создавать обширные и быстрые флуктуации в фазе несущей и в амплитуде сигналов СРНС. Это явление, хотя и кратковременное и нечастое в средних широтах, может создавать трудности в непрерывном отслеживании сигналов в полярных и экваториальных районах. При фазовых измерениях двухчастотным приемником возможно значительное ослабление влияния ионосферы. При измерениях одночастотным приемником влияние ионосферы является существенных на расстояниях свыше 30 км между приемниками.
б) влияние тропосферы. Тропосферная рефракция не зависит от частоты и, следовательно, влияет и на кодовую модуляцию, и на фазу несущей одинаковым образом. Задержка зависит от температуры, влажности и давления, изменяется с высотой пользователя и с типом местности под траекторией сигнала. Из-за того, что тропосферная рефракция не зависит от частоты несущей, ее невозможно устранять в двухчастотных наблюдениях, в отличие от ионосферной рефракции. Показатель преломления воздуха для электромагнитных волн, используемых в спутниковых системах определения местоположения, зависит от состояния атмосферы, то есть от температуры воздуха Т, давления Р и влажности (давления водяных паров) е:
N = f ( T , P , e ).
Показатель преломления является функцией положения точек пространства, через которые проходит путь сигнала, так как метеорологическое поле атмосферы считается регулярным лишь условно. Оно является неоднородным, особенно вблизи поверхности Земли. Поэтому, для вычисления пути, пройденного сигналом спутника и найденного из прямых или косвенных определений, необходимо знать действительный показатель преломления воздуха вдоль пути.
Действительный средний показатель преломления п теоретически определяется выражением:
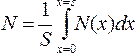
Это равенство предполагает, что функция N ( x ) от пути х известна. Она может быть определена только при достоверных предположениях о строении атмосферы или из непосредственных измерений.
4.Многопутность. Является главным источником ошибок. Приемник принимает не только сигналы со спутника по прямой линии, но и отраженные от окружающих предметов и земной поверхности. В итоге фазовые измерения по суммарному сигналу имеют искажения, которые могут достигать 5 см, и в случаях, когда отраженный сигнал превышает прямой, эта ошибка может приближаться к 10 см.
Отражающими объектами для приемников могут быть здания, деревья, холмы и т. д. Многопутность создается земной поверхностью, особенно гладкими поверхностями, такими, как асфальтовое покрытие, водное зеркало, ровный слой снега. Значительно меньше влияет травяной покров, пахота. Крыши зданий являются плохим окружением для приемника, поскольку здесь часто есть выступы зданий, трубы и другие отражающие объекты поблизости от антенны. Неплохими отражателями являются деревья, особенно с мокрой листвой.
Для ослабления ошибок, обусловленных многопутностью, целесообразно: 1) пункты наблюдений выбирать в местах, вблизи которых нет отражающих объектов; 2) при разработке антенных систем для спутниковых приемников предусмотреть установку экранирующих приспособлений, препятствующих попаданию отраженных радиосигналов на вход антенны; 3) на пунктах; подверженных влиянию отражений, выполнять более длительные сеансы наблюдений, усреднение полученных результатов может существенно ослабить влияние много пути ости; 4) при обработке результатов наблюдений использовать только те, на которые влияние отражающих поверхностей наименьшее.
5.Помехи радио — и электромагнитных волн . Высоковольтные линии ЛЭП, антенны мобильной связи, радио и телевизионные антенны, троллейбусные контактные сети создают помехи, которыми нельзя пренебрегать. В зависимости он мощности излучения необходимо исключить GPS наблюдения в зоне от 50 м (например от ЛЭП 10 кВ, троллейбусных контактных сетей) до нескольких сотен метров ( ЛЭП 35, 110, 150, 220, 330, 400, 500, 750, 800 и 1150 кВ; радио и телевизионных антенн).
6. Ошибки наблюдателя . К ошибкам наблюдателя (оператора GPS) можно отнести следующие источники ошибок: ошибки центрирования, ошибки выбора режима и продолжительности наблюдений, ошибки выбора места наблюдений, ошибки выбора время наблюдения (окна наблюдений), ошибки ввода данных.
7.Ошибки обработки данных. При обработке особое внимание следует обращать на геометрию спутников, постоянство сигнала за весь период наблюдения. Необходимо исключать «всплывающие» спутники и спутники с прерывистым сигналом. Маска возвышения должна составлять не менее 13˚, отсеивая сигналы спутников, находящиеся в меньшей плоскости эклиптики над горизонтом. Также необходимо контролировать правильность ввода исходных данные при обработке, режим уравнивания произведенных наблюдений. По окончании обработки просмотр отчета об уравнивании обязателен.
РАЗДЕЛ II, ОЦЕНКА МЕТОДОВ ПОВЫШЕНИЯ КАЧЕСТВА GSP, ЮФ НУБиП УКРАИНЫ «КАТУ»
2.1. Анализ существующих методов повышения качества GPS измерений.
Обобщение и анализ современного мирового опыта показывают, что возможности использования одних лишь традиционных методов и средств при выполнении геодезических и кадастровых работ практически исчерпаны. Высоким требованиям современных технологий, применяемых в области геодезии, землеустройства и кадастра по точности и оперативности получения данных отвечают только методы, основанные на использовании спутниковых навигационных систем.
Геодезические спутниковые технологии дополняют классические технологии и повышают их эффективность. Основными недостатками классических технологий являются: высокая трудоемкость и высокая стоимость полевых работ. В среднем по стоимости и затратам времени полевые работы составляют не менее 60% от общего объема работ. Классические технологии, особенно в части полевых работ, не поддаются полной автоматизации. Спутниковые технологии свободны от большинства этих недостатков. Они не требуют установления взаимной видимости между пунктами и постройки наружных знаков. Высокая степень автоматизации спутниковых технологий основана на применении радиоэлектронной и вычислительной техники.
Геодезическая съемка только тогда хороша, когда контролируется весь процесс ее измерений и обработки. Одним из главных минусов GPS измерений, на мой взгляд, является отсутствие полного контроля точности измерений. Точность определения координат пункта как в полевых условиях (съемка в режиме реального времени с использованием радиомодемов) так и в процессе камеральной обработки нельзя констатировать со стопроцентной гарантией.
Повысить качество GPS измерений можно следующим образом:
1. Выбор комплектации оборудования.
2. Планирование полевых работ, учет особенностей объекта съемки.
3. Выбор режима измерений. Соблюдение технологий GPS измерений.
4. Использование профессионального ПО для уравнивания измерений.
5. Полевой и камеральный контроль измерений.
6. Объединение GPS методов с другими приборами.
7. Использование дифференциальных GPS сервисов.
8. Использование перманентной сети базовых станций GPS, технология VRS (см. раздел 3).
Выбор оптимальной комплектации оборудования.
Можно выстроить следующую примерную шкалу спутниковых приемников в зависимости от их возможностей:
- кодовый приемник для навигации по стандартному коду GPS или ГЛОНАСС;
- кодовый приемник с дифференциальным режимом при пост-обработке;
- кодовый приемник с дифференциальным режимом в реальном времени;
- кодовый приемник со сглаживанием псевдодальности по фазе несущей;
- фазовый одночастотный приемник (статика обязательна, быстрая статика, кинематика истинная и кинематика «стой иди» (Stop-and-Go) по необходимости);
- фазовый одночастотный приемник с теми же возможностями и с возможностями работы в реальном времени;
- фазовые двухчастотные приемники, по аналогии с одночастотными приемниками с возможностями статики, быстрой статики, истинной кинематикой, кинематикой «стой — иди», с возможностями измерений в реальном времени или только с пост-обработкой.
Основные параметры GPS приемников:
1. Тип принимаемых сигналов, способ измерения фазы. Приемники могут использовать для определения координат пять типов сигналов: С/А-код, Р(У)-код на двух частотах и фазу несущей на двух частотах. Уже сейчас появляются новые типы сигналов. Главный недостаток одночастотных измерений состоит в невозможности точного учета ионосферной задержки. Однако для базовых линий умеренной длины, примерно до 20-30 км, одночастотные приемники обеспечивают почти такие же результаты, как двухчастотные приемники. Наблюдения на двух частотах значительно ослабляют влияние ионосферы и обеспечивают более быстрые (примерно в 1.5-2 раза) и надежные результаты.
2. Число каналов в приемнике. Чтобы отслеживать все видимые спутники (концепция all-in-view), высокоточный геодезический приемник, работающий только по GPS, должен иметь не менее 12 каналов. Если приемник работает по двум системам, то нужно иметь не менее 20 каналов.
3. Чувствительность приемника. Приемник должен отслеживать сигналы до уровня 20 дБ/Гц. При такой чувствительности он сможет отслеживать сигналы даже через листву, которая значительно ослабляет их силу.
4. Односистемные и двухсистемные приемники, то есть работающие только по сигналам GPS или ГЛОНАСС, или по сигналам обеих систем. Для пунктов, расположенных севернее параллели 55° (величина наклонения спутников GPS), в северной части небосвода находится зона, недоступная американским спутникам, но по которой проходят видимые траектории спутников ГЛОНАСС, что улучшает геометрические факторы понижения точности DOP.
5. Типичный темп записи данных: для статических измерений обычная дискретность записи данных — 15 — 30 с, для кинематических применений необходим намного более высокий темп, возможно даже 0.10 — 0.05 с.
6. Подавление интерференции. Чтобы сигналы от других источников не мешали работе приемника, когда они попадают в полосу частот ГЛОНАСС/GPS, приемник должен подавлять интерференцию, по крайней мере, в полосе 50 дБ.
7. Тип антенны и ее характеристики. Чем выше точность измерений, тем более высокими становятся требования к антенне приемника. Для геодезического приемника важно, чтобы фазовый центр антенны имел симметрию в плане лучше, чем 2 мм. Если центр перемещается в соответствии с ориентировкой антенны, то это вызовет ошибку в вычисленном положении. Чтобы антенна имела указанную характеристику, она должна иметь четырехполюсную цепь питания. Антенна геодезического приемника должна иметь возможность для ориентировки относительно сторон горизонта.
Не менее важной является способность антенны противостоять многопутности сигналов; наличие отражающей плоскости (плоскости заземления ground plane) или дроссельных колец (choke ring), применение технологий типа Stealth. Однако важно знать, что антенны с заглушающими кольцами choke-ring — достаточно крупные по размерам, массивные и плохо подходят для кинематических измерений. Способность антенны принимать только сигнал с правосторонней круговой поляризацией также предохраняет от многопутности, так как однократно отраженный сигнал меняет поляризацию на противоположную. Антенны с коническим куполом, в отличие от плоских антенн, представляют хорошую защиту от птиц, что особенно важно для базовых станций.
8. Внешние сигналы. Приемник должен иметь маркер внешних событий с точностью регистрации времени не хуже 25 нс, что необходимо для многих видов кинематических съемок. Приемник должен иметь вход для стабильной частоты 5, 10 или 20 МГц от внешнего генератора, необходимой в длительных сеансах и мониторинге. У приемников, предназначенных для топографических и ГИС съемок, желательно иметь возможность для подключения датчиков (сенсоров), позволяющих записывать в файл нужную информацию:
- штрих-кодовый считыватель атрибутов объектов съемки,
- определитель кислотности почвы,
- определитель уровня радиоактивности,
- определитель объема биомассы и др.
9. Наличие автоматической метеостанции. При обработке наблюдений могут понадобиться метеорологические данные, полученные в процессе измерений. Результаты измерений температуры, давления и влажности автоматической метеостанции можно записывать в файл наблюдений на пункте. Такая информация особенно важна при выполнении работ, в которых повышены требования к точности определения высоты, причем это касается, в первую очередь, районов работ со значительными перепадами высот между пунктами (50 — 100 м и более).
10. Объем внутренней памяти. Спутниковый приемник имеет память для записи результатов и память для конфигурирования приемника. Память в приемнике может быть расположена на съемных технических носителях различного типа (карточки РССМА тип 1, II, флэш-память и т. д.).
Требования к объему памяти приемника, необходимой для записи результатов измерений, зависят от вида выполняемых работ, режимов и параметров измерений, типа приемника. Оптимальная карта памяти для всех видов работ объемом 512 МБ.
11. Модемы. Для обеспечения связи между базовым и мобильным приемником используются радиомодемы. Для работы с ним необходимо иметь разрешение Главного радиочастотного центра (ГРЧЦ).
Поскольку в каждой стране и даже каждом районе для радиосвязи выделяется определенный частотный диапазон, то необходимо, чтобы аппаратура подходила по этому параметру. Мощность передатчика должна отвечать расстоянию, на которое ведется передача. Желательно, чтобы передатчик был объединен с приемником без дополнительных кабелей, которые создают неудобства в обращении и могут ломаться на морозе. Для работы с телефонным модемом разрешение не требуется, но необходимы услуги оператора сотовой связи. Для этого необходимо заранее узнать зону покрытия услуги GPRS оператора мобильной связи.
12. Поддерживание функции DGPS. Режим DGPS состоит в передаче дифференциальных поправок от базовой станции к полевому приемнику. Существуют стандартные форматы данных для передаваемых поправок. Каждый изготовитель может иметь свой собственный формат данных. Чтобы можно было объединять данные разных изготовителей, программное обеспечение должно поддерживать форматы RTCM как в опорном, так и в полевом приемниках.
13. Режим кинематики в реальном времени (Real Time Kinemalic, RTK) заключается в передаче поправок фазы несущей от базы к полевому приемнику. Существуют некоторые стандартные форматы данных для передачи этих поправок. Каждая фирма также может давать данные в своем собственном формате. Чтобы совместно использовать приемники разных изготовителей, программное обеспечение должно поддерживать форматы RТСМ RTK как на базовой станции, так и на мобильной станции.
14. Аппаратура должна иметь средства дли включения и выключения приемника, запускать и останавливать запись данных и указывать соответствующие операции приемника. Это минимальный интерфейс, который необходим оператору. Применение пользовательского интерфейса с большими возможностями будет эффективно при высокой квалификации наблюдателя.
15. Энергообеспечение и батареи. Комплект приемника и антенны должен иметь низкое энергопотребление с несколькими опциями. Заряда батарей должно хватать на 8-10 часов непрерывной работы.
16. Окружающая среда. Обычно аппаратура должна работать при температуре окружающей среды от -20 до +50°С. Однако, в условиях Сибири и Якутии нередки температуры -40°С и ниже, и, если приемки или его антенна не рассчитаны на такую температуру, то либо придется принимать меры по утеплению аппаратуры, либо отказываться от полевых работ. Система должна работать под дождем. Антенна и контроллер приемника должны быть герметичны.
17. Прочные кабели. Проблема кабелей оказывается очень актуальной. В комплекте аппаратуры может быть несколько разных кабелей (антенна – контроллер, приемник — компьютер).
Слабое место в кабеле — соединение с разъемом. Изготовители аппаратуры стремятся уменьшить количество кабелей и соединений. Выпускаются приемники, образующие единое целое с антенной (моноблок).
Появилась аппаратура с беспроводной связью — с инфракрасными портами, с радиосвязью bluеtooth.
18. Аксессуары для установки и переноски в поле, для упаковки и транспортировки: кейс, рюкзак, штативы, кинематические вешки (биподы, триподы), трегеры, центриры, рулетки (мерные рейки) и т. п. Это оборудование должно быть удобным, легким, обеспечивать требуемый уровень точности работ.
19. Физические характеристики. Конструкция приемника должна быть прочной, легкой и портативной. Желательно, чтобы тарелка и контроллер выдерживали удар при падении с высоты штатива.
20. Совместимость приемников. Приемники должны проверяться на совместимость и способность синхронизации (это одна из задач метрологической аттестации).
Кроме того, могут возникать проблемы из-за различного числа каналов, разной техники обработки сигналов и различной привязки к меткам времени.
Планирование полевых работ, учет особенностей объекта съемки
Программа планирования как правило входит в состав программного обеспечения. Исходными данными для планирования являются приближенные координаты объекта, приблизительное время работ, данные рекогносцировки о препятствиях вокруг пунктов и альманах системы. Для получения альманаха достаточно перед планированием и выездом на объект выставить приемник на открытое место и подержать его включенным 15-20 минут. Приемник за это время успеет собрать альманах и этот альманах можно будет перекачать в компьютер. В результате перед выездом в поле бригада геодезистов получает график, на котором указано, сколько спутников будут находиться над маской в данный часовой интервал и каков будет PDOP. Для пунктов, вблизи которых существуют препятствия, планирование выполняют отдельно. Оператор вводит информацию о препятствиях и программа учитывает, что спутники, находящиеся за препятствием, во внимание принимать не следует. Всегда желательно иметь «свежий» альманах. В противном случае устаревает эфемеридная информация и данные о «здоровье» спутников. Не рекомендуется пользоваться альманахом, возраст которого превышает месяц.
Выбор режима измерений. Соблюдение технологий GPS измерений.
|
Метод |
Миним. число спутников |
Миним. время наблюдений |
Обычная точность в плане |
Другие характеристики |
|
Статика |
4 |
1 час |
Одночастотный: 5 мм + 1 ppm Двухчастотный: 5 мм + 1 ppm |
Одночастотными приёмниками наилучшая точность достигается на базовых линиях менее 10 км. Для двухчастотных приёмников ограничений по длине базовой линии нет. |
|
Быстрая статика |
4 |
8 — 30 минут |
Между статической и кинематической точностью, в зависимости от времени стояния на точке. |
Процедуры — такие же, как и для статической съёмки, но время наблюдений более короткое. |
|
Кинематика с РР ( постобработкой) |
4 |
2 эпохи |
1 см + 2 ppm |
Ограничение по длине базовой линии приблизительно 50 км. Приёмник должен принимать пять спутников для OTF инициализации. Ровер должен быть инициализирован для измерений с точностью на уровне сантиметра. |
|
Кинематика в реальном времени (RTK) |
4 |
1 эпоха |
1 см + 2 ppm |
Необходим радиомодем. Ограничение по длине базовой линии приблизительно 10 км. Приёмник должен принимать пять спутников для OTF инициализации. Ровер должен быть инициализирован для измерений с точностью на уровне сантиметра. |
|
Дифференциальные измерения с РР (постобработка, кодовые приемники) |
4 |
2 эпохи |
Приёмники с технологиями Эверест / Максвелл: < 0.5 м RMS с 5 спутниками, PDOP < 4. Другие приёмники: 1-3 м в тех же условиях. |
Нет необходимости в непрерывном отслеживании спутников. |
|
Дифференциальные измерения в реальном времени |
4 |
1 эпоха |
Приёмники с технологиями Эверест / Максвелл: < 0.5 м RMS с 5 спутниками, PDOP < 4 Другие приёмники: 1-3 м в тех же условиях. |
Необходим радиомодем. Нет надобности в непрерывном отслеживании спутников. |
Таблица 2
Основные характеристики различных режимов измерений
Данные характеристики справедливы в условиях низкого уровня переотражения (многопутности) и низкой ионосферной активности. Они основаны на результатах полученных с помощью новейшего оборудования Trimble.
GPS оборудование следует использовать только на открытой местности. Желательно проводить GPS измерения только с целью создания планово-высотного обоснования, сгущения сети и т. п. (остальные инструментальные полевые измерения лучше проводить при помощи электронных тахеометров, теодолитов).
Результаты GPS наблюдений следует контролировать по расстояниям между пунктами, измеренными повторно длинномерными приборами. При GPS съемке избегать любых экранизирующих и отражающих поверхностей, объектов электромагнитного излучения. Одноэтажные здания, автомобили, ЛЭП 0,4 кВ, деревья высотой до 6-8 м должны находится не ближе чем в 30 метрах от снимаемого пункта; высоковольтные ЛЭП, многоэтажные здания и т. п. – не ближе чем в 50-100 метрах и более.
Огромное значение играет выбор исходного пункта ГГС. Для территории Крыма, особенно ЮБК, является сложной задачей поиск стабильного, несмещенного пункта. Под воздействием оползневых процессов ежегодно десятки пунктов ГГС на южнобережье смещаются, поэтому следует использовать только проверенные пункты.
Следует помнить, что наиболее точные измерения будут при длине базовой линии до 10-15 км для одночастотных приемников (в горной местности 5-10 км).
Использование профессионального ПО для уравнивания измерений.
Наиболее распространенной в Крыму является ПО Trimble Geomatics Office v 1.6. В данной программе существует возможность уравнивания не только GPS измерений, но и измерений полученных с помощью тахеометров, теодолитов и нивелиров.
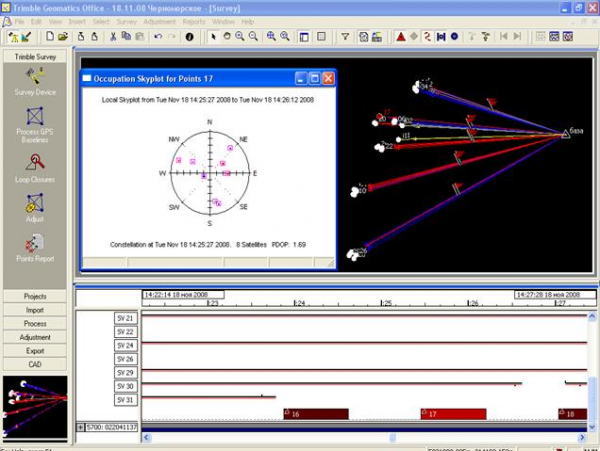
Рисунок 2. Программное обеспечение TGO.
Использование ПО Trimble Geomatics Office предусматривает решение таких задач как: обработки GPS базовых линий (установлен модуль WAVE Baseline Processing), уравнивания сети (установлен модуль Network Adjustment), обработки измерений полученных как с помощью GPS оборудования, так и с помощью обычных геодезических приборов, оценки точности и контроля качества данных (QA/QC), импорта и экспорта файлов дорожного проектирования, импорт и экспорт измерений, цифровое моделирование местности и отрисовка горизонталей, перевычисление из различных систем координат, сбор и экспорт ГИС данных, трансформации системы координат, обработка кодов элементов местности (топокодов), планирование работ, составление отчета по проекту.
Важнейшее утилитой является Timeline window (окно хронологии).
Timeline window – это тесная интеграция окна хронологии с графическим окном, мощный инструмент контроля качества. С помощью данной утилиты можно исключить из уравнивания некорректные сигналы спутников (прерывающиеся, всплывающие), а также проконтролировать правильность геометрии спутников.
Одним из лучших считается программное обеспечение Trimble Total Control. Данное ПО предоставляет пользователю полный контроль над любым геодезическим проектом. Оно обеспечивает великолепные возможности для контроля и управления процессом обработки больших массивов данных, и выполнения углубленного анализа результатов обработки. Программное обеспечение идеально подходит для обработки больших GPS сетей и длинных базовых GPS линий, предоставляет усовершенствованные возможности для анализа и обработки геодезических данных, и является особенно полезным для геодезистов, которые выполняют большую обработку данных фотограмметрии или геодезических сетей, а также для научно-исследовательских и образовательных целей. Основные возможности Trimble Total Control включают: обработку базовых GPS линий, поддержку российской спутниковой системы ГЛОНАСС, обработку данных статических, быстростатических, кинематических, непрерывно-кинематических съемок, поддержку сырых GPS данных других производителей, поддержку данных электронных тахеометров и цифровых нивелиров, уравнивание одно-, двух — и трехмерных геодезических сетей, геодезические трансформации, включая распределение невязок, поддержку картографических данных и проекций, углубленный анализ данных GPS и ГЛОНАСС, постобработку Virtual Reference Station (VRSTM), ручную и автоматическую оценку точности, гибкую систему составления отчетной документации.
Полевой и камеральный контроль измерений.
На мой взгляд, GPS приемник предназначен только для создания планово-высотного обоснования, в редких случаях его можно использовать для съемок как основной прибор при условии отсутствия застройки, деревьев. Но тем не менее многие используют GPS для съмки в городских условиях. Полевой контроль можно проводить следующими способами:
1) При сгущение сети, создании планово-высотного обоснования необходимо формировать съемочные точки в зоне видимости друг друга либо, если это невозможно, создавать их парами на расстоянии 30-50 метров друг от друга, чтобы после промерить расстояния между точками с помощью тахеометра, дальномера либо любого другого точного длинномерного прибора.
2) При съемках в условиях повышенной многопутности, радио — и электромагнитных помех расстояния между съемочными точками контролируются также, как было сказано выше. Для съемки «неприступных» точек применяются линейные засечки:
а) Створная засечка. Производится с двух-трех точек на небольшие расстояния (до 30 метров).
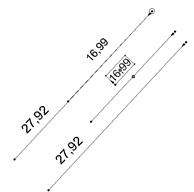 От определяемой точки натягивается мерная лента либо шнур, снимается GPS приемником на расстоянии 4-10 метров друг от друга 2-3 точки, определяется расстояние от точек засечки до определяемой точки. При возможности произвести 2-3 засечки с разных сторон.
От определяемой точки натягивается мерная лента либо шнур, снимается GPS приемником на расстоянии 4-10 метров друг от друга 2-3 точки, определяется расстояние от точек засечки до определяемой точки. При возможности произвести 2-3 засечки с разных сторон.
 б) Засечка с измерением радиуса окружности. GPS приемником измеряется три или более точки вокруг определяемой точки, промеряются расстояния до испрашиваемой точки.
б) Засечка с измерением радиуса окружности. GPS приемником измеряется три или более точки вокруг определяемой точки, промеряются расстояния до испрашиваемой точки.
В камеральных условиях отстраиваются измеренные расстояния, которые являются радиусами окружностей, испрашиваемая точка будет находиться на пересечении окружностей. Данный способ применим на небольших расстояниях, желательно не менее 4 точек.
При камеральной обработке наилучшим контролем являются материалы ДЗЗ. При съемках крупномасштабных объектов подходит для исключения грубых ошибок космоснимки Google, максимальным разрешением 0,6 метра на пиксель (к 2011 году планируется точность 0,25 м., на данный момент по американским законам максимальное допустимое разрешение 0,5 метра на пиксель).
Программный комплекс Digitals Geosystem содержит функцию загрузки космоснимков по координатам (а также сшивки снимков) с точностью от 3 метров. Например, по Симферополю точность космоснимков Google 3-15 метров.
Наилучшим контролем GPS измерений в камеральных условиях является аэрофотосъемка. Нынешние технологии позволяют получить аэрофотосъемку с разрешением 0,05-0,07 м. Оптимальным для требований точности является аэрофотосъемка масштабом 1:8000-1:12000 и разрешением 0,07-0,10 м. Только при наличии аэрофотоснимков высокого разрешения возможна GPS съемка в условиях высокой многопутности плотнозастроенных, залесенных районов.
Объединение GPS методов с другими приборами.
Использование пседвоспутников. Среди самых быстро растущих применений GPS нужно отметить геодезические работы и управление механизмами на открытых карьерах. Использование GPS на открытых карьерах и разрезах может значительно уменьшить стоимость различных операций. Доступность GPS позиционирования в реальном времени на сантиметровом уровне точности привлекает внимание шахтной индустрии. Это главное, почему точное GPS позиционирование является ключевым компонентом, который ведет к автоматизации тяжелых и дорогих механизмов и машин. К сожалению, как и в предыдущих случаях, сигналы от спутников будут практически блокироваться по мере увеличения глубины карьера. Поэтому надежное позиционирование только по спутникам GPS в глубоких открытых карьерах невозможно. Одна обещающая система для усиления GPS, гарантирующая высокоточное позиционирование, состоит в использовании системы псевдоспутников (псевдолитов).
Псевдоспутник — это электронный прибор наземного базирования, который передает GPS-подобный сигнал (несущая частота, кодовая модуляция и сообщение с данными), который может быть принят GPS приемником. В отличие от спутников GPS, на которых используются атомные генераторы, в псевдолитах для генерации сигналов используются недорогие кварцевые часы.
Добавление сигналов от псевдоспутников улучшает доступность системы и геометрию засечки. Число и положение псевдолитов может быть оптимизировано таким образом, чтобы обеспечить работу всей системы. В частности, можно значительно уменьшить фактор потери точности по высоте VDOP, что приведет к уменьшению ошибки в высоте пункта. Другое преимущество от использования псевспутников состоит в том, что их сигналы не подвержены действию ионосферы. Однако им присущи другие недостатки, которые нужно преодолевать, чтобы обеспечивать высокую точность позиционирования. Первый из них известен как проблема «далекий — близкий», которая происходит из-за изменения мощности принимаемого сигнала псевдоспутника. Чем ближе приемник к передатчику псевдоспутника, тем выше уровень сигнала, и наоборот. Эта проблема не существует при позиционировании только по сигналам GPS, так как мощность принимаемых сигналов остается почти постоянной, поскольку расстояние «спутник — приемник» изменяется незначительно. Следовательно, при объединении GPS с псевдоспутниками более сильный сигнал от псевдоспутника может заглушить другие сигналы. Это проблема близкого сигнала. Однако если сигнал от псевдоспутника намного слабее сигнала GPS, то приемник может не отследить его, это известно как проблема «далекий». Передача сигналов от псевдоспутника короткими импульсами с низким рабочим циклом (коэффициентом заполнения) может минимизировать влияние в проблеме «далекий — близкий».
Использование неточных часов для генерации сигналов псевдоспутников вызывает ошибку синхронизации сигналов, что приводит к ошибке в расстоянии, которая не исключается, даже если формируются двойные разности. Возможное решение этой проблемы идет через использование сообщения с данными свободного содержания от главного псевдоспутника. Другая проблема, которая требует внимания пользователя псевдоспутника, состоит в ошибке от многопутности. Ослабление этой ошибки предлагается производить через калибровку псевдоспутника или использование направленных антенн. В отличие от позиционирования только по GPS, где ошибки эфемерид не влияют значительно на вычисление положения, ошибки координат псевдоспутника будут передаваться в решение, вызывая большие ошибки позиционирования. Это объясняется сравнительно короткими расстояниями между приемником и псевдоспутником. Эта проблема также решается тщательной калибровкой антенны псевдолита.
Радиус действия псевдоспутников невелик (от 1 до 10 км), а геометрические особенности их расположения (в плоскости горизонта) не позволяют только с их помощью эффективно определять третью координату (высоту).
В то же время, такая геометрия оптимальна для определения координат в плане.
Псевдоспутники применяются в морской и воздушной навигации, при съемке тоннелей, шахт и т. д.
Использование дифференциальных GPS сервисов.

Рисунок 3. Схема мировых дифференциальных GPS сервисов
С середины мая 2003 г. на территории Украины (г. Харьков) функционируетновая GPS станция компании OmniSTAR BV и с этого момента в любом регионеУкраины GPS-потребителям доступен дифференциальный сервис дециметровой точности кроме DGPS/VBS-сервиса субметровой точности.
Компания OmniSTAR BV является подразделением холдинговой компании FUGRO GROUP, головные офисы которой находятся в Нидерландах, США и в Австралии. FUGRO GROUP содержит 160 офисов в 40 странах и предоставляет дифференциальные коррекции и другие услуги GPS-пользователям для выполнения геодезических работ, высокоточного определения местоположения, реализации геоинформационных технологий в наземных, авиационных и морских приложениях. Имеет в настоящее время в своем распоряжении примерно 100 референцных станций, 3 центра загрузки данных на спутники и 2 центра сбора, обработки и управления (ЦСОУ) глобальной сети референцных GPS-станций (СРС).
Virtual Base Station (VBS)- и High Performance (HP) – технологии компании OmniSTAR — разработаны для удовлетворения самых высоких требований к точности
местоопределения. Как VBS, так и HP-данные (корректирующие поправки) передаются в L-диапазоне через созвездие геостационарных спутников, так, что любые GPS — пользователи могут воспользоваться этими коррекциями, оформив соответствующую подписку на эти услуги. Дифференциальный сервис OmniSTAR автоматически обеспечивает оптимальную дифференциальную коррекцию для текущего местоположения потребителя, используя передовые сетевые технологии –»виртуальная базовая (референцная) станция» — VBS&HP. Система OmniSTAR является глобальной DGPS подсистемой реального времени, которая доставляет коррекции от глобальной сети базовых (референцных) станций. Компания OmniSTAR BV использует эту сеть для определения и передачи потребителям ионосферных, орбитальных, частотно-временных и других, свойственных GPS,
погрешностей. Эти данные передаются в ЦСОУ, где они проходят контроль качества и целостности, а затем – через геостационарные спутники – ретранслируются авторизованным потребителям OmniSTAR–коррекций. Эта процедура организована таким образом, чтобы передаваемые коррекции были мгновенно доступны пользовательским приемникам. Приемники потребителей обрабатывают данные всехдоступных ближайших референцных станций для получения оптимального решения навигационной задачи. В этом случае возможно одновременное использование всейn доступной информации с учетом текущего местоположения потребителей по отношению к местоположению каждой из ближайших референцных станций. Оптимальное решение для каждого потребителя получается путем взвешенной обработки данных от референцных станций, где веса являются функциями расстояний между потребителем и станциями. Результатом является одно множество коррекций (по каждому спутнику), оптимальное для данного текущего положения каждого потребителя, т. е. так называемое
VBS-решение. Такая процедура выполняется непрерывно для каждого нового положения GPS-приемника и поэтому OmniSTAR–коррекции подходят как для статических, так и для динамических приложений.
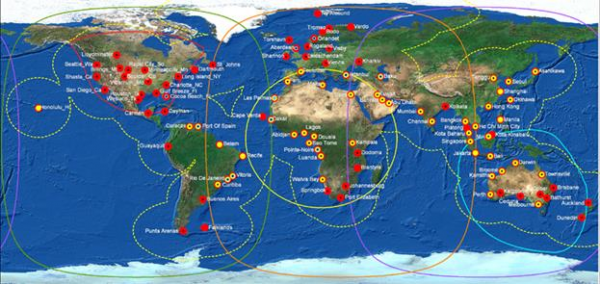
Рисунок 4.Схема сети базовых станций и центров управления OmniSTAR.
Преимущества использования VBS&HP:
1) гарантированно обеспечивается оговоренная точность на больших территориях обслуживания;
2) независимость от какой-либо одной референцной станции;
3) исключение скачкообразного изменения координат, возникающее при «переключениях» с одной базовой станции на другую.
На территории Украины также действует Европейский дифференциальный сервис EGNOS. EGNOS — европейская геостационарная служба навигационного покрытия. EGNOS предназначена для улучшения работы систем GPS, ГЛОНАСС и Galileo на территории Европы и является аналогом американской системы WAAS. Зона действия EGNOS охватывает всю Европу, север Африки и небольшую европейскую часть России. Также как и WAAS, система состоит из сети наземных станций, главной станции, которая аккумулирует информацию от спутников GPS, ГЛОНАСС и Galileo, и геостационарных спутников EGNOS, через который эта информация транслируется на GPS-приёмники, поддерживающие приём дифференцированных поправок.
На всей территории Украины (за исключением самых восточных областей) прием сигналов спутников EGNOS возможен даже простыми бытовыми приемниками. Так как система EGNOS пока не имеет там наземных станций, практическая польза варьируется от большой (Карпаты) до никакой (Донецкая, Луганская области).
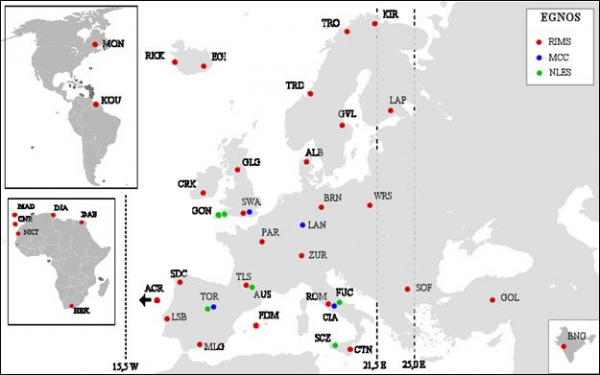
Рисунок 5. Схема сети базовых станций и центров управления EGNOS
2.2. Сравнение режимов наблюдений и практическое подтверждение влияния многопутности и различного рода помех на уровень качества GPS измерений на примере студенческого городка ЮФ НУБиП Украины «КАТУ».
Цель проведения работы:
1. Сравнение результатов GPS съемки проведенной в различных режимах.
2. Практическое подтверждение влияния многопутности и различного рода помех на уровень точности измерений.
3. Сгущение съемочной сети на территории студенческого городка ЮФ НУБиП Укратны «КАТУ».
Применяемое оборудование:
1. GPS приемники — Trimble 5700 L1, Trimble R3, антенны А3, контроллер Trimble Recon, лазерный дальномер, бипод, штатив, трегер с оптическим центриром.
2. Электронный тахеометр Nikon NPL 302.
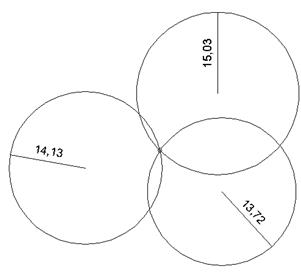
Проведение работы. Измерения проводились от Базовой станции, закрепленной на пункте ГГС пирамида «Замостье», который рассоложен на СВ от студгородка в районе кладбища. В качестве «базового» приемника использовался GPS приемник Trimble 5700 L1, в качестве ровера — Trimble R3. Первым этапом было измерение на пункте ГГС «Молодежное» для сравнения «паспортной» точности приемников. Наблюдения на пункте ГГС производились в режиме Fast Static, в течении временного отрезка 20 минут (при 7 спутниках), маска возвышения составляла 13˚, отсеивая сигналы спутников находящихся в меньшей плоскости эклиптики над горизонтом. Точность Trimble R3 составляет 0.5 см + 1*n, где n – длина базовой линии в километрах. Длина базовой линии составляет ≈ 2 км, следовательно, точность должна быть в пределах 0,7 см. Точность оптического центрира на трегере порядка 0,5 мм, точность центрирования бипода при высоте 2 м порядка 1 см. Таким образом, при идеальных условиях для наблюдений СКП положения точки будет: ![]() см.
см.
Далее были выбраны две группы пунктов: первая группа – 9 шт. была выбрана для сравнения точности режимов измерений по следующим параметрам: отсутствие переотражающих объектов, отсутствие электромагнитных и радио помех, отсутствие застройки, деревьев и любых других преграждающих радио сигнал объектов; вторая группа пунктов – 8 шт. была выбрана с целью практической проверки влияния многопутности и различного рода помех.
Первая группа пунктов была измерена в трех режимах: быстрой статики, кинематике с постобработкой, непрерывной съемке. Все измерения проводились при не менее чем 4-ех спутниках, маска возвышения составляла 13˚, PDOP не превышал 6. Наблюдения в режиме Fast Static производились в течении временного отрезка 20 минут; наблюдения в режиме PP Kinematic производились в течении временного отрезка в 45 сек. (9 эпох) дважды на каждой точке; наблюдения в режиме непрерывной съемки производились статично на каждой точке с периодом автосохранения каждые 5 сек. После всех GPS наблюдений 9 пунктов был выполнен контроль по расстояниям при помощи электронного тахеометра Nikon NPL 302.
Каждая из точек второй группы 8 шт. была измерена на протяжении 45 сек. в режиме PP Kinematic при 7-9 спутниках, PDOP составлял 1,6-3,0. Точки располагали на разных расстояниях вблизи «неблагополучных» для GPS съемки объектов. После всех GPS наблюдений 8 точек был выполнен контроль по расстояниям при помощи электронного тахеометра Nikon NPL 302.
После полевых работ в камеральных условиях производился обсчет данных полученных в поле с помощью программы Trimble Geomatic Office v 1.6.
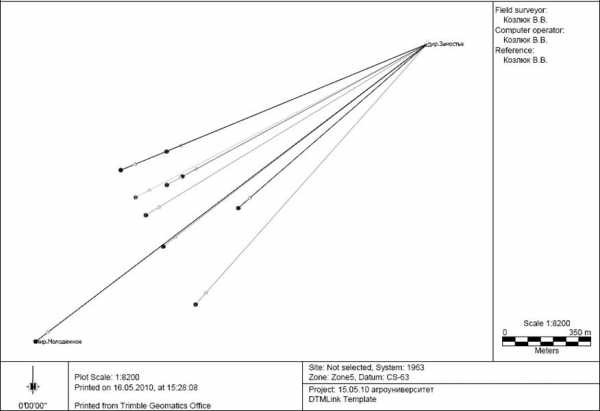
Рисунок 6. Схема базовых линий.
Результаты проведенной работы. Разница координат пункта ГГС пирамида «Молодежное» по съемке и по каталогу составляет 0,073 м в плане и 0,054 м. по высоте. Нельзя сказать что точность прибора 0,073 м, так как одного измерения и одного пункта ГГС недостаточно для статистики, но тем не менее можно сказать, что проведенные измерения достаточно точны относительно пунктов ГГС «Замостье» и «Молодежное». Результаты измерений приведены ниже:
Отчёт по вычисленным базовым линиям точек первой группы и пункта ГГС «Молодежное»
Проект: 15.05.10 агроуниверситет
|
Имя пользователя |
Дата время |
21:13:11 16.05.2010 |
|
|
Система координат |
1963 |
Зона |
Zone5 |
|
ИГД Проекта |
|||
|
ИГД Высот |
Модель Геоида |
Не выбрано |
|
|
Ед. изм. координат |
Метры |
||
|
Ед. изм. расстояний |
Метры |
||
|
Ед. изм. высот |
Итоговый отчёт по вычислениям
|
От |
До |
Режим съемки |
Длина базовой линии |
Тип решения |
Ratio |
Reference Variance |
RMS |
|
база |
Пирамида |
Статика |
1969,617м |
L1 Фиксированное |
3,4 |
8,194 |
0,012м |
|
база |
Пир.1 |
Кинематика |
1969,618м |
L1 Фиксированное |
3,4 |
3,390 |
0,006м |
|
база |
Пир.2 |
Кинематика |
1969,612м |
L1 Фиксированное |
3,4 |
1,996 |
0,006м |
|
база |
1 |
Статика |
1004,693м |
L1 Фиксированное |
2,5 |
11,312 |
0,014м |
|
база |
1(1) |
Кинематика |
1004,691м |
L1 Фиксированное |
2,5 |
8,622 |
0,012м |
|
база |
1(2) |
Кинематика |
1004,692м |
L1 Фиксированное |
2,5 |
8,911 |
0,010м |
|
база |
2 |
Статика |
1404,718м |
L1 Фиксированное |
1,6 |
3,042 |
0,009м |
|
база |
2(1) |
Кинематика |
1404,718м |
L1 Фиксированное |
1,6 |
6,717 |
0,013м |
|
база |
2(2) |
Кинематика |
1404,713м |
L1 Фиксированное |
1,6 |
10,230 |
0,015м |
|
база |
3 |
Статика |
1333,210м |
L1 Фиксированное |
2,4 |
9,915 |
0,010м |
|
база |
3(1) |
Кинематика |
1333,211м |
L1 Фиксированное |
2,4 |
16,823 |
0,020м |
|
база |
3(2) |
Кинематика |
1333,215м |
L1 Фиксированное |
1,5 |
10,196 |
0,015м |
|
база |
4 |
Статика |
1315,601м |
L1 Фиксированное |
4,7 |
0,905 |
0,003м |
|
база |
4(1) |
Кинематика |
1315,599м |
L1 Фиксированное |
4,7 |
1,626 |
0,005м |
|
база |
4(2) |
Кинематика |
1315,604м |
L1 Фиксированное |
4,7 |
0,855 |
0,004м |
|
база |
5 |
Статика |
1313,610м |
L1 Фиксированное |
4,7 |
2,815 |
0,005м |
|
база |
5(1) |
Кинематика |
1313,612м |
L1 Фиксированное |
4,7 |
3,582 |
0,008м |
|
база |
5(2) |
Кинематика |
1313,609м |
L1 Фиксированное |
4,7 |
4,111 |
0,006м |
|
база |
6 |
Статика |
1318,126м |
L1 Фиксированное |
2,8 |
14,140 |
0,018м |
|
база |
6(1) |
Кинематика |
1318,134м |
L1 Фиксированное |
2,8 |
2,110 |
0,006м |
|
база |
6(2) |
Кинематика |
1318,133м |
L1 Фиксированное |
2,8 |
1,172 |
0,004м |
|
база |
7 |
Статика |
1121,671м |
L1 Фиксированное |
1,6 |
1,636 |
0,006м |
|
база |
7(1) |
Кинематика |
1121,672м |
L1 Фиксированное |
1,6 |
1,636 |
0,006м |
|
база |
7(2) |
Кинематика |
1121,669м |
L1 Фиксированное |
1,6 |
1,288 |
0,005м |
|
база |
8 |
Статика |
1109,658м |
L1 Фиксированное |
1,6 |
1,316 |
0,005м |
|
база |
8(1) |
Кинематика |
1109,654м |
L1 Фиксированное |
1,6 |
2,634 |
0,007м |
|
база |
8(2) |
Кинематика |
1109,662м |
L1 Фиксированное |
1,6 |
5,180 |
0,009м |
|
база |
9 |
Статика |
1180,721м |
L1 Фиксированное |
1,6 |
1,213 |
0,005м |
|
база |
9(1) |
Кинематика |
1180,720м |
L1 Фиксированное |
1,6 |
1,527 |
0,006м |
|
база |
9(2) |
Кинематика |
1180,718м |
L1 Фиксированное |
1,6 |
1,908 |
0,009м |
|
база |
74651353 |
непрерывная |
1969,626м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,621м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,622м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,621м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,622м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,622м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,618м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651353 |
непрерывная |
1969,617м |
L1 Фиксированное |
3,4 |
1,302 |
0,004м |
|
база |
74651352 |
непрерывная |
1318,131м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,128м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,129м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,132м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,132м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,135м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,132м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651352 |
непрерывная |
1318,131м |
L1 Фиксированное |
2,8 |
8,851 |
0,014м |
|
база |
74651351 |
непрерывная |
1004,702м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
|
база |
74651351 |
непрерывная |
1004,701м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
|
база |
74651351 |
непрерывная |
1004,698м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
|
база |
74651351 |
непрерывная |
1004,698м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
|
база |
74651351 |
непрерывная |
1004,700м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
|
база |
74651351 |
непрерывная |
1004,700м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
|
база |
74651351 |
непрерывная |
1004,704м |
L1 Фиксированное |
2,5 |
4,929 |
0,009м |
Ratio (отношение) — это отношение вероятности правильности наилучшего в настоящий момент набора целых чисел к вероятности правильности следующего наилучшего набора. Таким образом, высокое отношение указывает, что наилучший набор целых чисел — намного лучше, чем любой другой набор. Это дает нам уверенность, что он правилен. Отношение должно быть более 5.
RMS — среднеквадратическое отклонение, выражает точность измерений на точке. Это — радиус круга ошибки, в пределах которого находятся приблизительно 70% всех координат. Может быть выражено в единицах измерения расстояния или в циклах длины волны.
Reference Variance — характеристика обработки. Насколько реальная ошибка, выявленная в процессе обработки отличается от предрасчетной. Идеальное значение RV 1.0 в хороших решениях — ее значения меньше единицы.
В результате контроля по расстояниям с помощью электронного тахеометра Nikon NPL 302 было определено, что максимальное расхождение наблюдается на точке 3(1) – 0,042 м (съемка в кинематике Ratio — 2,4, Reference Variance — 16,823, RMS — 0,020 м).
В результате контроля по расстояниям было определено, что самой точной GPS съемкой является съемка в режиме быстрой статики – расхождение от измерений по тахеометру находились в диапазоне 0,005-0,022 м; расхождения в кинематической съемке находились в диапазоне 0,008-0,042 м в плане и 0,015-0,066 м по высоте; расхождения в режиме непрерывной съемки находились в диапазоне 0,003-0,037 м в плане и 0,001-0,103 м по высоте. Графическое отображение результатов приведено на рисунке 7 и в приложении 1 и 2.
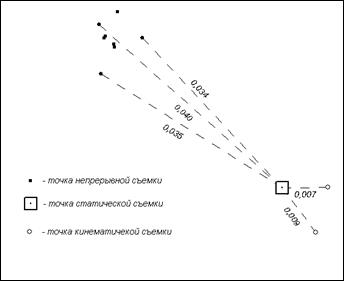
Рисунок 7. Смещение непрерывной съемки и кинематики относительно статики.
Вторым этапом измерений было измерений точек в «неблагоприятных» для GPS съемки местах. Точки снимались парой на расстоянии 10-20 метров друг от друга. Первая точка располагалась в непосредственной близости от района «неблагоприятного» для GPS съемки. Все измерения проводились в режиме PP Kinematic в течение временного отрезка в 45 сек. (9 эпох) при не менее чем 4-ех спутниках, маска возвышения составляла 13˚, PDOP не превышал 6. После электронным тахеометром Nikon NPL 302 все точки второй группы были отсняты дополнительно, в качестве планово-высотного обоснования для тахеометра использовались измеренные ранее точки в режиме Fast Static на расстоянии 30-50 метров от контролируемых точек. Наблюдения, проведенные тахеометром условно принимаются за эталонные. Все GPS измерения были произведены 15.05.2010 в период с 13.00 по 14.30, количество спутников и их геометрия изменились незначительно.
Рисунок 8.Схема положения спутников 15.05.10 г. в 13:10:52.
Результаты наблюдений:
1.GPS съемка в зоне интенсивного автомобильного движения. Первая точка была отснята при 8 спутниках, PDOP составлял 3,1. Отличие от эталонного значения 0,273 м. Причиной такого отклонения служит множество факторов: многопутность (поверхность автомобиля является хорошей отражающей поверхностью), вибрация (грузовые автомобили движутся на большой скорости, поток воздуха создает вибрацию в приемнике), частая потеря сигнала (крупногабаритный автотранспорт, автобусы заслоняет часть задействованных спутников).
Вторая точка была отснята при 8 спутниках, PDОP составлял 3,6. Отличие от эталонного значения 0,071 м. Вывод: интенсивное автомобильное движение, особенно грузовой и крупногабаритный автотранспорт оказывает значительное влияние на точности GPS наблюдений. Место позиционирования следует выбирать в 20-25 метрах от подобных объектов.
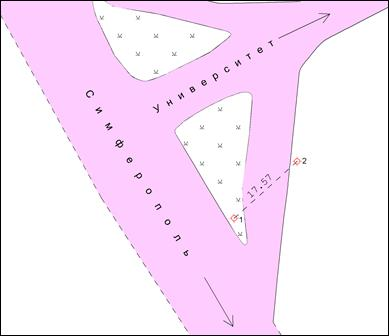
Рисунок 9.Схема съемочных точек в зоне интенсивного автодвижения.
2.GPS съемка в зоне плотной высотной застройки. Точка 3 была отснята при 5 спутниках, PDOP составлял 7,2. Отличие от эталонного значения 1,124 м. Причина: количество спутников недостаточно для качественного фиксированного решения. Точка 4 отснята при 8 спутниках, PDОP составлял 3,0. Отличие от эталонного значения 0,033 м. Вывод: в городских условиях, в условиях плотной застройки выбрать место позиционирования является непростой задачей, удаление от высотных зданий должно быть значительным 35 -50 метров.
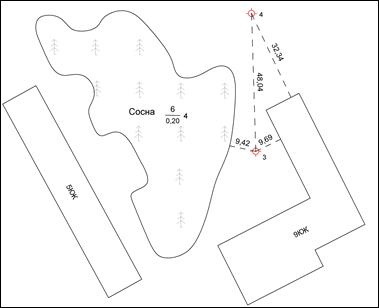
Рисунок 10.Схема съемочных точек в зоне плотной высотной застройки.
3. GPS съемка в зоне высокоствольных лесов. Точка 5 была отснята при 8 спутниках, PDOP составлял 2,6. Отличие от эталонного значения 0,124 м. Причина: количество спутников недостаточно для качественного фиксированного решения. Точка 6 отснята при 8 спутниках, PDОP составлял 2,6. Отличие от эталонного значения 0,019 м. Вывод: деревья значительно влияют на точность GPS измерений, особенно листва (особенно мокрая) препятствует прохождению сигнала. Минимальное отдаление от деревьев 20-50 метров (в зависимости от высоты дерева).
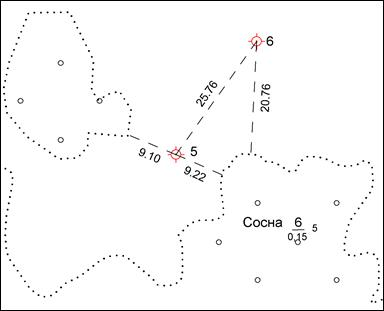
Рисунок 11.Схема съемочных точек в зоне высокоствольных лесов.
4. GPS съемка в зоне прохождения высоковольтных ЛЭП. Точка 7 была отснята под линией электропередач напряжением 110 кВ при 8 спутниках, PDOP составлял 3.1.Отличие от эталонного значения – 0,371 м. Точка 8 была отснята на расстоянии 20,57 м. от точки 8 при 9 спутниках, значение PDOP – 2.6. Отличие от эталонного значения 0,144 м. Вывод: в зависимости он мощности ЛЭП необходимо исключить GPS наблюдения в зоне распостранения электромагнитных помех — от 50 м (ЛЭП 10 кВ, троллейбусные контактные сети) до нескольких сотен метров (ЛЭП 35, 110, 150, 220, 330, 400, 500, 750, 800 и 1150 кВ).
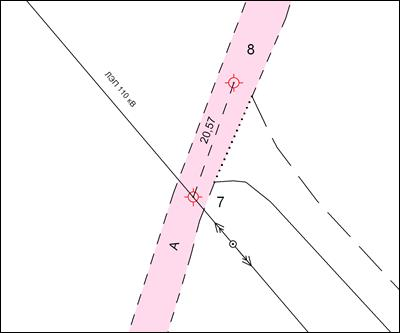
Рисунок 12.Схема съемочных точек в зоне высоковольтной ЛЭП.
Отчёт по вычисленным базовым линиям точек второй группы.
Проект: 15.05.10 агроуниверситет
|
Имя пользователя |
Дата время |
22:17:34 16.05.2010 |
|
|
Система координат |
1963 |
Зона |
Zone5 |
|
ИГД Проекта |
|||
|
ИГД Высот |
Модель Геоида |
Не выбрано |
|
|
Ед. изм. координат |
Метры |
||
|
Ед. изм. расстояний |
Метры |
||
|
Ед. изм. высот |
Итоговый отчёт по вычислениям
|
От |
До |
Режим съемки |
Длина базовой линии |
Тип решения |
Ratio |
Reference Variance |
RMS |
|
база |
1 |
Кинематика |
1611,64 м |
L1 Fixed |
1,1 |
18,392 |
0,032м |
|
база |
2 |
Кинематика |
1594,46 м |
L1 Fixed |
3,4 |
5,670 |
0,006м |
|
база |
3 |
Кинематика |
1067,01 м |
L1 Float |
0,8 |
19,254 |
0,058м |
|
база |
4 |
Кинематика |
1034,46 м |
L1 Fixed |
2,5 |
8,315 |
0,004м |
|
база |
5 |
Кинематика |
1435,16 м |
L1 Fixed |
2,4 |
6,514 |
0,012м |
|
база |
6 |
Кинематика |
1409,70 м |
L1 Fixed |
4,7 |
7,125 |
0,009м |
|
база |
7 |
Кинематика |
1579,56 м |
L1 Fixed |
1,6 |
16,222 |
0,020м |
|
база |
8 |
Кинематика |
1560,05 м |
L1 Fixed |
3,1 |
7,849 |
0,016м |
Вывод: в результате проведенной работы был определен самый точный вид GPS съемки – Fast Static (для GPS приемника Trimble R3).
Точность данного режима, относительно ближайших пунктов ГГС «Замостье» и «Молодежное», составила 0,073 м. при 7 спутниках. Точность режима PP Kinematic ≈ 0.085-0.088 м., точность непрерывной съемки ≈0,103-0,123 м.
В результате проведенной работы было практически подтверждено влияние многопутности и различного рода помех. Различие от «истинных» значений в различных ситуациях составили от 0,124 м. до 0,124 м. Особенно «опасна» съемка в зоне плотной высотной застройки.
Было выяснено, что значение PDOP, ratio, reference variance и RMS не всегда точно характеризуют точность съемки. Особенно наглядно это видно в отчете по вычисленным базовым линиям точек второй группы. Я предполагаю, что GPS приемник и программное обеспечение TGO формирует значение данных показателей в основном с учетом количества спутником и их геометрии, а уровень помех мало учитывается. Именно поэтому важнейшее значение имеет контроль измерений.
Целью проведенной работы также было сгущение съемочной сети на территории студенческого городка. В качестве точек планово-высотного обоснования выбраны лучшие по результатам съемок измерения, каталог координат и схема точек прилагаются ниже.
Каталог координат точек планово-высотного обоснования на территории студенческого городка ЮФ НУБиП Украины «КАТУ»
|
№ |
X |
Y |
Z |
|
1 |
4 978 511.37 |
5 186 554.78 |
236.45 |
|
2 |
4 978 117.65 |
5 186 386.04 |
235.66 |
|
3 |
4 978 482.30 |
5 186 188.81 |
235.66 |
|
4 |
4 978 555.05 |
5 186 148.59 |
235.66 |
|
5 |
4 978 666.36 |
5 186 089.88 |
235.66 |
|
6 |
4 978 742.23 |
5 186 271.14 |
235.66 |
|
7 |
4 978 640.87 |
5 186 334.18 |
235.66 |
|
8 |
4 978 605.88 |
5 186 272.32 |
235.66 |
РАЗДЕЛ III
СОЗДАНИЕ СЕТИ ПЕРМАНЕНТНЫХ БАЗОВЫХ GPS СТАНЦИЙ НА ТЕРРИТОРИИ АР КРЫМ КАК МЕТОД ПОВЫШЕНИЯ ТОЧНОСТИ GPS ИЗМЕРЕНИЙ
3.1.Анализ современного состояния земельного фонда АР Крым.
Цель: проанализировать состояние земельного фонда АР Крым, соотношение земель по категориям; оценить факторы, влияющие на состояние и характер использования земель.
Земельный фонд Автономной Республики Крым (без г. Севастополя), согласно данным государственного земельного учета, по состоянию на 01.01.2009 г. составляет 2608,1 тыс. га. Преобладающая часть земель находится в интенсивном сельскохозяйственном обращении. Площадь сельскохозяйственных угодий составляет 1800,0 тыс. га (69% от общего фонда), в том числе пашни — 1262,7 тыс. га.
Рекреационных и курортно-оздоровительных земель близ Черного моря — около 100 тыс. га (прибрежная зона).
Общая площадь земель, на которых размещены учреждения курортно-оздоровительного, рекреационного, историко-культурного и природоохранного назначения, не превышает 9,5 тыс. га, из которых одна треть приходится на Южнобережье.
Площадь земельного фонда в расчете на 1 жителя республики составляет 1,24 га, в том числе сельскохозяйственных угодий – 0,85 га, из них пашни – 0,6 га. По Украине в целом эти показатели составляют соответственно 1,21 га, 0,84 га и 0,66 га.
Общее количество землепользователей и собственников земли (юридических и физических лиц) составляет 815,1 тыс.
В землях запаса и резерва находится около 30 % земель автономии (более половины из этих земель- с\х земли).
В административном отношении республика включает в себя 14 административных районов, 16 городов, в том числе 11 городов областного подчинения, 56 поселков городского типа, 38 поселковых советов, 243 сельских советов, 1022 населенных пунктов в том числе 72 городских и 950 сельских. По состоянию на 01.01.2009 г площадь земель в границах населенных пунктов составляет 178,2 тыс. га. Общее количество землепользователей и собственников земли (юридических и физических лиц) составляет 569,655 тыс. В собственности и пользовании физических и юридических лиц находится 103,7 тыс. га (58,2% от общей площади земель населенных пунктов).
Существует тенденция к увеличению площади территорий населенных пунктов, так с 2000 года по 2010 площадь земель в границах населенных пунктов увеличилась на 11,85 тыс. га.
Число административно-территориальных единиц, cоветов и населенных пунктов на 1 января 2009 года
|
Районов |
14 |
|
Городов республиканского значения |
11 |
|
Районов в городах |
3 |
|
Городов районного подчинения |
5 |
|
Поселков городского типа |
56 |
|
Поселковых Советов |
38 |
|
Сельских Советов |
243 |
|
Населенных пунктов |
1022 |
|
в том числе: |
|
|
городских |
72 |
|
сельских |
950 |
Районы. Сведения о территории районов
|
Наименование Района |
Наименование районного центра |
Территория (тыс. кв. км) |
|
Бахчисарайский |
г. Бахчисарай |
1,589 |
|
Белогорский |
г. Белогорск |
1,894 |
|
Джанкойский |
г. Джанкой |
2,667 |
|
Кировский |
пгт. Кировское |
1,208 |
|
Красноперекопский |
г. Красноперекопск |
1,231 |
|
Красногвардейский |
пгт. Красногвардейское |
1,766 |
|
Ленинский |
пгт. Ленино |
2,919 |
|
Нижнегорский |
пгт. Нижнегорский |
1,212 |
|
Первомайский |
пгт. Первомайское |
1,474 |
|
Раздольненский |
пгт. Раздольное |
1,231 |
|
Сакский |
г. Саки |
2,257 |
|
Симферопольский |
г. Симферополь |
1,753 |
|
Советский |
пгт. Советское |
1,080 |
|
Черноморский |
пгт. Черноморское |
1,509 |
|
Всего |
23,79 |
По состоянию на 01.01.2009 г площадь земель под жилой застройкой составляет 16,0 тыс. га (9,0% от общей площади населенных пунктов), земли коммерческого назначения занимают 2,3 тыс. га (1,3% от общей площади населенных пунктов).
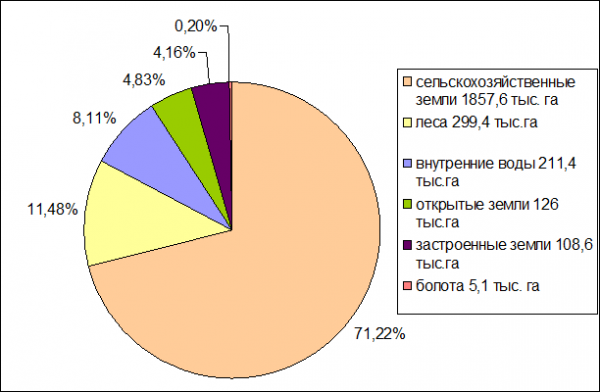
Рисунок 13. Земельный фонд АР Крым по угодьям.
1.Сельскохозяйственные земли.
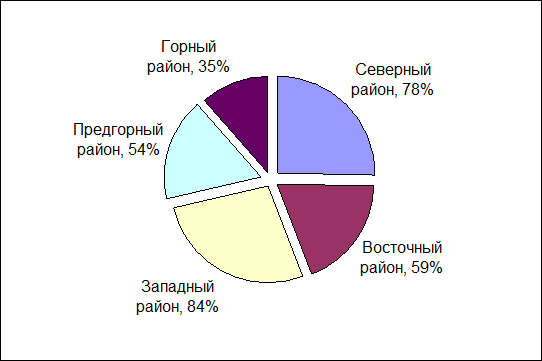
Рисунок.14. Сельскохозяйственная освоенность районов Крыма.
Земли сельскохозяйственного назначения по состоянию на 01.01.2009 г составляют 1857,6 тыс. га из них 1798,9 тыс. га относится к сельскохозяйственным угодьям. По структуре сельскохозяйственных угодий на долю пашни приходится 70,3% (1264,90 тыс. га.); залежи 0,7% (11,7 тыс. га); многолетних насаждений 4,5% (80,9 тыс. га); сенокосов 0,1 (2,2 тыс. га); пастбищ 24,4% (438,9 тыс. га).
В пользовании или собственности юридических и физических лиц по состоянию на 2008 г находится 1474,2 тыс. га сельскохозяйственных угодий. Всего в АР Крым сельским хозяйством занимается 869 сельскохозяйственных предприятий, из которых 774 не государственные.
Земельные участки сельскохозяйственного назначения для ведения садоводства заслуживают особого внимания, так как их процент на рынке земли существенный. Общая площадь земель для ведения садоводства по состоянию на 01.01.2009 г составляет 12,1 тыс. га и находится в собственности или пользовании у 178,338 тыс. физических и юридических лиц.
2.Земли рекреационного назначения.
- 1,1 тыс. га расположены в городах (2,0% от общей площади городов);
- 1,8 тыс. га в поселках (6,6% от общей площади поселков);
- 0,9 тыс. га в селах (0,8% от общей площади сел).
К землям рекреационного назначения относятся земельные участки зеленых зон и зеленых насаждений городов и прочих населенных пунктов, учебно-туристические и экологические тропы, маркированные трассы, земельные участки, занятые территориям домов отдыха, пансионатов, объектов физической культуры и спорта, туристических баз, кемпингов, яхт — клубов, стационарных и палаточных туристических оздоровительных лагерей, домов охотников и рыболовов, детских туристических станций, детских и спортивных лагерей, прочих аналогических объектов, а так же земельные участки, переданные для дачного строительства и сооружения прочих объектов стационарной рекреации.
Основной туристско-рекреационный потенциал Автономной Республики Крым сосредоточен в следующих районах: ЮБК, Бахчисарайский район, Евпатория, Керчь, Сакский район Феодосия, Черноморский район. Каждый их приведенных городов и районов обладает потенциальными возможностями для развития туризма, располагает землями рекреационного назначения.
Основная часть рекреационных ресурсов сосредоточена в Южнобережной зоне — 1701 объект, Центральной (Бахчисарай, Белогорск, Симферополь) — 547, Восточной (Кировский, Ленинский, Советский) — 255, Западной (Сакский, Черноморский) — 114, Северной (Джанкойский, Красногвардейский, Красноперекопский, Нижнегорский, Первомай-ский, Раздольненский) — 278. Всего по Крыму к данной категории ресурсов отнесено 3149 объектов.
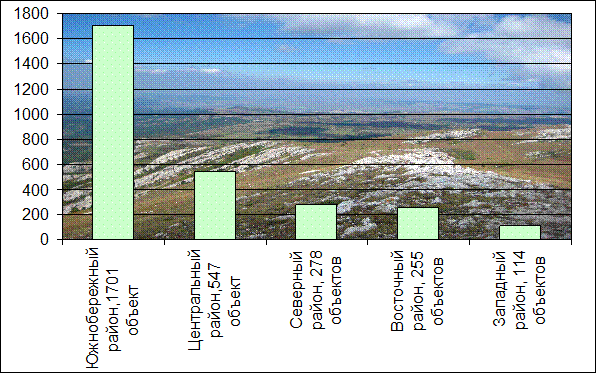
Рисунок 15.Диаграмма туристических ресурсов.
3.Земли природно-заповедного и другого природоохранного назначения; земли историко-культурного назначения. По состоянию на 01.01.2009 г. в Автономной Республике Крым расположено 153 объекта природно-заповедного фонда Украины общей площадью (с учетом морской акватории) 134 093 га, из них:
- общегосударственного значения — 43 объекта общей площадью 101104,5700 га;
- местного значения — 110 объектов площадью 32 989,3566 га.
Площадь земель объектов природно-заповедного фонда без учета морской акватории и естественных аквальных комплексов составляет 87 431 га, что составляет 3,4% от общей площади земель АР Крым.
Свыше 11,5 тысяч памятников истории, культуры и архитектуры, относящихся к различным историческим эпохам, цивилизациям, этносам и религиям, насчитывается в Крыму. Самые уникальные из них, например, комплекс пещерных городов и монастырей, генуэзская крепость, святые места различных конфессий и другие используются в качестве туристических объектов. Более половины этих объектов сосредоточены в южной зоне, около пятой части — в центральной (Симферополь, Бахчисарай, Белогорский район), 10% — на севере и востоке Крыма, остальные достопримечательности находятся на территориях Евпатории, Сакского и Черноморского районов.
На территории полуострова функционируют 17 самостоятельных государственных музеев с 26 филиалами, а также более 300 общественных и ведомственных музеев, которые подразделяются на исторические (6 единиц), краеведческие (5), естественнонаучные (5), литературные (9), художественные (8).
Бахчисарайский и Керченский – историко-культурные, Херсонский — государственный историко-археологический, заповедник Судакская крепость, Алупкинский дворцово-парковый заповедник.
Пять государственных заповедников, 33 заказника, из них 16 общегосударственного значения, 87 памятников природы, 13 из них общегосударственного значения, 10 заповедных урочищ и т. д.
Лечебно-минеральные ресурсы: 8 месторождений минеральных вод, 15 месторождений лечебных грязей.
В последние годы на территории полуострова появились новые туристские объекты, которые представляется возможным отнести к категории естественнонаучных музеев, а именно: оборудованные для массового посещения пещеры Красная и Мраморная, Трехглазка, рекреационные тропы — Боткинская, Штангеевская, Тарахташская, Голицына.
Новым и перспективным направлением в развитии туристской индустрии Крыма стал зеленый (сельский) туризм. Этот вид туризма является одним из видов малого бизнеса, поднимает роль краеведения, усредняет элементы активной деятельности и отдыха, создает жизненную среду, приближенную к природе. Для этого в Крыму есть все условия: сочетание живописных гор и обширных равнин, лесов, степей, морей, озер, уникальная флора и фауна, широкая сеть природных, исторических и этнографических памятников.
В настоящее время развитие санаторно-курортной отрасли в Автономной Республике Крым становится одним из приоритетных направлений. Оно базируется на использовании минеральных вод (с потенциальным дебитом 14 тыс. м3 в сутки), лечебных грязей (с балансовыми запасами 22,4 млн. м3), пляжей (протяженностью 517 км), климатических и ландшафтных ресурсов, морского и горного воздуха и пр. Всего в Крыму насчитывается более 600 санаторно-курортных и оздоровительных учреждений, используемых в основном для сезонного лечения и отдыха. Санатории и пансионаты с лечением составляют 28% и расположены преимущественно на Южном берегу Крыма, а также на курортах Евпатория, Саки. При этом ЮБК специализируется на лечении взрослого населения, Евпатория же — детский курорт. Доля детских мест в санаториях Евпатории составляет 73%, на ЮБК — 12%.
Создание разветвленной экологической сети обеспечивает сохранение уникальных естественных ландшафтов и биоразнообразие Крыма. Мягкое использование природных ресурсов в рекреационной и туристической деятельности в структуре природно-заповедного фонда республики позволит стать мощным стойким источником финансовых поступлений в бюджет автономии.
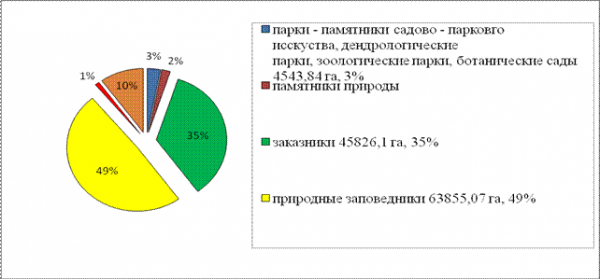
Рисунок 16.Природно-заповедный фонд АР Крым.
Факторы, влияющие на состояние и характер использования земель.
1. Природный фактор
Благодаря расположению на средних широтах, климатические зоны полуострова резко отличаются друг от друга. Северная степная часть полуострова характеризуется климатом умеренного пояса со снежной и ветреной зимой, короткой весной, жарким и сухим летом и дождливой осенью. Весь южный берег Крыма прикрыт с севера горами, которые в какой-то мере препятствуют проникновению холодных циклонов и уходу тёплого воздуха. Климат южнобережья — субтропический. В связи с тем, что море медленнее прогревается весной и так же медленно остывает осенью, здесь поздняя весна и тёплая осень. Особенно знаменит крымский «бархатный сезон» — сентябрь, первая половина октября.
По сезонам года осадки распределяются неравномерно. Так, в степном и предгорном Крыму их максимум приходится на июнь — июль, на ЮБК и в южной части гор — на январь или декабрь, на западном и восточном побережьях осадки выпадают относительно равномерно в течение года. Около 80 — 85% годовой суммы осадков выпадает в виде дождя. На долю твердых осадков приходится менее 10%, а смешанных — 5 — 8%. Число дней с дождями колеблется от 80 — 130 в степных районах до 150 — 170 в горах. Летом в Крыму наблюдается не более 5 — 10 дней с дождями за месяц.
Крымские горы отвесной стеной обрываются в сторону морского побережья, а противоположные их склоны пологи. Самые высокие вершины — Роман-Кош (1545 м), Ай-Петри (1232 м), Чатыр-Даг (1527 м), Северная Демерджи (1356 м), Отвесные стены, высотой от 200 до 400 метров, простираются вдоль побережья от мыса Айя до поселка Гурзуф.
По территории республики протекает 257 рек длиной более 5 км. Наиболее крупная — Салгир, длиной 220 км, а наиболее полноводная — Бельбек (расход воды до 150 литров в секунду).
На полуострове, главным образом, вдоль побережий, насчитывается более 50 соленых озер, используемых для получения солей и лечебных грязей: Сакское, Сасык, Донузлав, Бакал, Старое озеро, Красное озеро, Акташское, Чокракское, Узунларское и др.
На полуострове имеются следующие виды почв: черноземы на плотных породах (255,0 тыс. га), черноземы на плотных глинах (177,2 тыс. га), черноземы преимущественно щебнистые и галечниховые на элювии карбонатных и окарбоначенных пород (242,1 тыс. га), черноземы южные остаточно-, слабо — и среднесолонцеватые преимущественно на лессовидных глинах и суглинках (58,9 тыс. га), черноземы предгорные (134,7 тыс. га), лугово-черноземные почвы, преимущественно на лессовидных породах (66,0 тыс. га), темно-каштановые остаточно-, слабо — и среднесолонцеватые почвы и их комплексы с солонцами на лессовидных породах (197,5 тыс. га), темно-каштановые слитные солонцеватые почвы на плотных глинах (и их комплексы с солонцами) (27,4 тыс. га), лугово-каштановые солонцеватые почвы и их комплексы с лугово-степными солонцами (137,5 тыс. га), луговые почвы (47,4 тыс. га), солонцы (92,6 тыс. га), дерновые почвы (168,7 тыс. га), горные бурые лесные почвы (42,1 тыс. га), коричневые горные сухих лесов и кустарников (48,5 тыс. га).
2. Социально — экономический фактор
Демографические условия . На 1 января 2009 года в Автономной Республике Крым проживало 1967,3 тыс. чел. Самым крупным городом является г. Симферополь (360,6 тыс. чел.).
Численность населения городов Евпатория и Керчь превышает 100 000 жителей. В течение 2008 года количество населения уменьшилось, на что, главным образом, повлияло естественное сокращение. Вследствие внутрирегиональной миграции в 2008 году городское население увеличилось за счет сельского.
Население Автономной республики Крым размещено по территории полуострова неравномерно. При средней плотности населения 75,4 чел./км2, плотность в равнинной части Крыма превышает 30 чел./км2, в горах — около 10 чел./км2, в предгорье — около 150 чел./км2, а на побережье — более 300 чел./км2. На побережье Крыма, являющемся наиболее ценной в рекреационном отношении территорией, проживает 50% населения республики. А если к рекреационно-ценным территориям отнести также горы и предгорья, то показатель возрастет до 75%.
Для Крыма характерны рост числа городов, а также поселков городского типа и относительная стабильность сельских поселений. Ввиду расширения сети рекреационных предприятий (санаториев, домов отдыха, пансионатов и т. д.), количество поселений городского типа на побережье увеличилось за 50 лет более чем в два раза.
Сельские населенные пункты размещаются по Крыму неравномерно. При общем количестве 950 сельских поселений и средней плотности 4 поселения на 100 км2, в Симферопольском районе плотность сельских поселений составляет 6, а в Черноморском районе — 2,2 поселения на 100 км2.
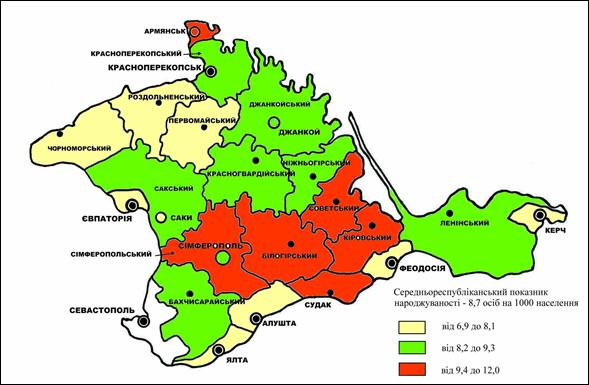
Рисунок 17.Среднереспубликанский показатель рождаемости на 01.01.09 г.
Инфраструктура аграрного рынка . По состоянию на 01.01.2009 инфраструктура аграрного рынка Автономной Республики Крым включает:
1) 2 товарные биржи, аккредитованные Министерством аграрной политики Украины;
2) 18 агроторговых домов;
3) 36 оптово-продовольственных и 63 оптово-плодоовощных рынков;
4) 113 обслуживающих сельскохозяйственных кооперативов, из них 8 перерабатывающих, 18 снабженческих, 19 заготовительно-сбытовых и 68 сервисных;
5) 606 заготовительных пунктов по закупке сельхозпродукции;
6) 86 фирменных магазинов;
7) 23 кредитных союзов.
Развитость экономики . К 2010 году экономика Украины ещё не вышла на уровень советского периода. ВВП Украины в 2007 году составил лишь 72,2 % от уровня 1990 года. С приходом новой власти с 2005 года Украина только наращивала внешний долг, так на начало 2010 года внешний долг составляет около $150 385 млн. $. Падение экономики с приходом мирового финансового кризиса и под руководством некомпетентного правительства составило от 17% до 40% в разных отраслях. По данным Министерства экономики, уровень теневого сектора экономики Украины по результатам II квартала 2009 года составляет 36 % от официального ВВП. По предварительным оценкам, государственный бюджет Украины, в результате увеличения теневого сектора, в 2009 году может недополучить более 100 млрд грн.
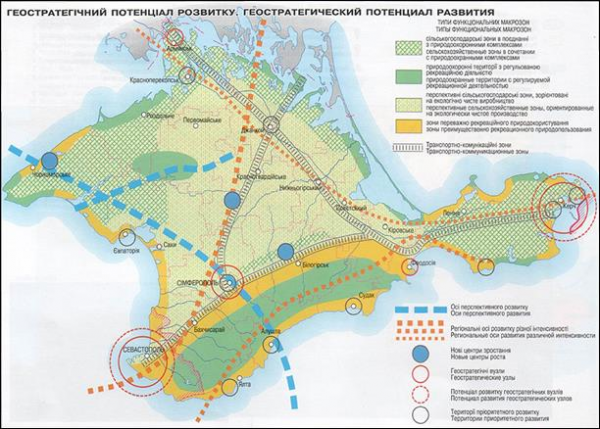
Рисунок 18.Геостратегический потенциал развития.
Уровень жизни один из самых низких в Европе. По Украине АР Крым занимает 14 место по уровню заработных плат. Уровень заработных плат на территории республики уменьшается по мере удаления от моря в глубь материка и с юга на север.
Развитие малого и среднего бизнеса.
|
Город/район |
Кол-во (2009г) |
|
Город |
|
|
Симферополь |
197 |
|
Алушта |
115 |
|
Армянск |
32 |
|
Джанкой |
47 |
|
Евпатория |
81 |
|
Керчь |
48 |
|
Красноперекопск |
55 |
|
Саки |
92 |
|
Судак |
103 |
|
Феодосия |
79 |
|
Ялта |
145 |
|
Бахчисарайский |
49 |
|
Белогорский |
28 |
|
Джанкойский |
11 |
|
Кировский |
19 |
|
Красногвардейский |
26 |
|
Красноперекопский |
17 |
|
Ленинский |
42 |
|
Нижнегорский |
14 |
|
Первомайский |
26 |
|
Раздольненский |
23 |
|
Сакский |
41 |
|
Симферопольский |
36 |
|
Советский |
24 |
Количество малых и средних предприятий по состоянию на 01.01.2008 г. В Украине подавляющее число приобретенных земельных участков по состоянию на 01.01.2009 г. имели коммерческое назначение – 83 %. Таким образом количество предприятий несомненно играет важную роль в характере использования земель.
Туристическая инфраструктура . Под туристической инфраструктурой я понимаю дорожную сеть, наличие гостиниц различных классов, пансионатов, санаториев, домов отдыха, детских лагерей, ресторанов, кинотеатров, театров, парков, наличие оборудованных чистых пляжей, наличие развитой качественной сферы услуг. Туризм является приоритетной отраслью в АР Крым, которому, на мой взгляд, нужно больше уделять вниманию в плане государственного регулирования и привлечения инвестиций.
3.Государственное регулирование (создание соответствующего законодательства, создание благоприятного инвестиционного климата).
Создание соответствующего законодательства . Главная задача состоит в том, чтобы на основе правовых норм обеспечить проведение работ по землеустройству, создать автоматизированный государственный банк данных о собственниках земли и землепользователях, экологическом состоянии, направлениях и структуре использования земельных ресурсов, повысить ответственность всех субъектов хозяйствования на земле за рациональное использование и качественный состав почв, сделать их материально и морально заинтересованными в проведении мероприятий по защите и воссозданию продуктивности земли.
Инвестиционный климат . В III квартале 2009 года Госкомстат зафиксировал двукратное — до 432 млн. $ — ускорение оттока прямых инвестиций из Украины. Вследствие оттока и курсовой переоценки приток прямых иностранных инвестиций в III квартале сократился до 614 млн.$. Опрос руководства ведущих иностранных инвестиционных компаний, который был проведен в октябре 2009 года исследовательским центром компании SEOLA Group, показал значительное ухудшение инвестиционного климата в Украине. Так, согласно данным исследования, 69 % руководителей иностранных инвестиционных компаний не собираются в ближайшее время рассматривать вопрос об инвестировании в экономику Украины. При этом 34 % иностранных инвестиционных компаний, которые уже работают в стране, собираются уйти из Украины, а 26 % — заморозить текущие проекты.
Вывод
- отсутствие государственного регулирования в сфере туризма и отдыха;
- слабая соответствующая транспортная, бытовая инфраструктура;
- коррупция и нестабильность власти и соответственно слабая инвестиционная привлекательность;
- развитие курортных районов Крымского побережья проходит крайне неравномерно: подавляющая часть отдыхающих устремляется на Южный берег Крыма;
- ничтожно малый процент участия малых городов в рекреационном хозяйстве Крыма;
- очень сложная и дорогостоящая процедура отвода земельных участков для рекреационного назначения.
В сельском хозяйстве нет должного контроля и экономического стимулирования для рационального использования и охраны земель. Несовершенство законодательства ведет к нецелевому использованию земель, неправомерной смене целевого назначения земли, несоблюдение охранных и санитарных зон и т. д.
3.2. Преимущества перманентной сети.
Традиционные методы геодезической съемки с ГНСС аппаратурой предполагают небольшие расстояния между ровером и базовой станцией (от 10-15 км до 30-40 км ) и при такой работе необходимо иметь сеть сгущения. Так же существует ряд ошибок, который влияет на качество работы и точность. При традиционной ГЛОНАСС\GPS-технологии потребитель обязан иметь комплект оборудования, в состав которого входит собственная базовая станция. Такая базовая станция должна быть предварительно размещена в районе проведения измерений на точке с известными координатами, после чего можно выполнять измерения подвижным приемником с требуемым качеством. Но так как требуется время на получение координат пунктов и существует проблема поиска их то время выполнения работ увеличивается в несколько раз.
Принцип функционирования . Все БС в автоматическом режиме непрерывно собирают навигационную информацию со спутников ГНСС и по каналам связи (например при помощи GSM, GPRS сети по протоколу NMEA) передают ее в Центр Управления (ЦУ).
Программное обеспечение ЦУ анализирует полученные данные и формирует ряд поправок: ионосферную, многолучевость, точность работы спутников и ошибки часов спутников, затем, создает модель на всю зону покрытия сети. Программа также вырабатывает DGPS-поправку для обеспечения навигации и создает виртуальную базовую станцию. В начале работы пользователь отправляет на ЦУ свои навигационные координаты. ЦУ рассчитывает и создает в радиусе 15 метров виртуальную базовую станцию, и прибор, с которым работает пользователь, получает поправку от этой БС, что позволяет обеспечить его надежными и точными данными. Данная технология может быть использована как для режима РТК, так и для режима пост-обработки.
— Позиционирование в режиме реального времени. С помощью сети станций возможно достижение точности определения местоположения 1–3 см в плане и 2–5 см по высоте. Созданием сети референцных станций уменьшается влияние ошибок, зависящих от расстояния, и тем самым улучшается точность и надежность результатов. Достигаемая точность:
— Позиционирование в режиме реального времени. С помощью сети станций возможно достижение точности определения местоположения 1–3 см в плане и 2–5 см по высоте. Созданием сети референцных станций уменьшается влияние ошибок, зависящих от расстояния, и тем самым улучшается точность и надежность результатов.
— Позиционирование в режиме реального времени с точностью от 0,5 до 3 метров. Корректирующие поправки передаются в диапазоне УКВ и длинных волн в стандартном формате RTCM. Кроме того, возможен ежесекундный прием корректурных данных по мобильному телефону (GSM) или в двухметровом радиодиапазоне.
— Точное и высокоточное позиционирование. Для высокоточных измерений необходим процесс постобработки данных. С помощью сети станций определение местоположения достигает миллиметрового уровня, как в плане, так и по высоте. Данные предоставляются для пользователей в стандартном формате RINEX как по е-mail, так и по ftp(http)-соединению или на сменных носителях.
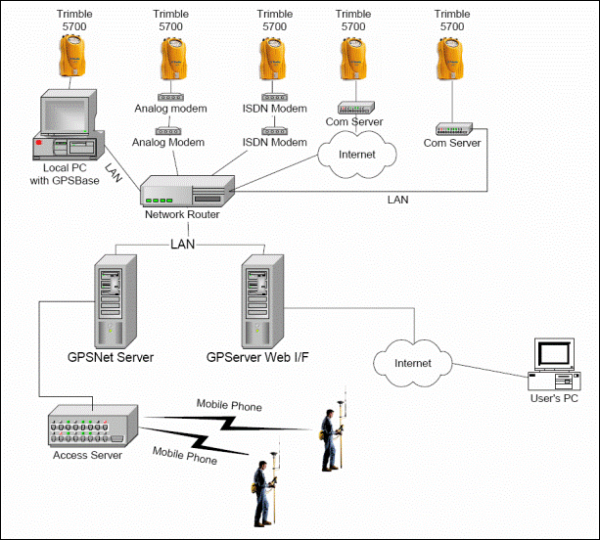
Рисунок 19.Схема передачи данных при VRS — технологии.
VRS – технология создания виртуальной базовой станции внутри сети перманентных станций. Используя данные как минимум от трех базовых станций (со средним расстоянием между ближайшими станциями 50–70 км), программная надстройка над GPSNet, называемая RTKNet, осуществляет обработку данных всех входящих в сеть GPS-станций. RTKNet может обеспечивать работу как в режиме DGPS (точность 1–3 м), так и в высокоточном RTK (точность 2–3 см) с инициализацией на лету. Моделирование ошибок в сети позволяет минимизировать ошибки и обеспечить равномерную точность по всей зоне обслуживания, вне зависимости от удаления от базовой станции. Также существенно (в несколько раз) уменьшается время от момента установления связи с ВЦ до момента фиксации решения. Формирует сообщения в формате RTCM, CMR/CMR+. Может генерировать поправки в формате FKP.
В настоящее время в Крыму существует возрастающая потребность в
развертывании стационарных базовых GPS станций, способных непрерывно
накапливать данные с требуемыми характеристиками и размещать их в
корпоративных сетях или Интернет для оперативной передачи потребителям.
Использование наблюдений таких станций особенно актуально при проведении работ в городских условиях, когда видимость навигационных спутников бывает существенно ограничена зданиями и сооружениями. Создание GPS инфраструктуры имеет следующие преимущества:
- создание единой системы координат на всей территории работы базовых станций,
- значительное увеличение производительности выполнения работ,
- сокращение проектных расходов, расходов на оснащение полевых бригад и следовательно повышение рентабельности работ,
- обеспечение безопасности базовых станций,
- контролируемая точность данных,
- возможность интенсивного внедрения GPS технологий
- контроль данных и значительное снижение ошибки ионосферных, тропосферных задержек и многопутности.
С помощью сети перманентных GPS станций проще и дешевле решать прикладные задачи. Сеть можно применить в следующих областях:
- геодезия, картография, ГИС, и землеустройство (определение границ и площадей земельных участков, градостроительные и кадастровые работы, привязка стационарных объектов, маркшейдерские работы, поддержка аэрофотосъемки, сгущение геодезических сетей, поддержка географических информационных систем (ГИС));
- железнодорожный, автомобильный транспорт и авиация;
- туризм;
- сельское хозяйство (например, обеспечение точного внесения посевного материала, удобрений и гербицидов в целях их экономии при выполнении сельскохозяйственных работ с использованием наземной техники и сельскохозяйственной авиации);
- мониторинг окружающей среды (экологический мониторинг, мониторинг оползневых и абразионных процессов);
- строительство (например, обеспечение строительных и дорожных работ, мониторинг сложных сооружений);
- коммунальное хозяйство;
- предупреждение глобальных катаклизмов.
При помощи постоянно действующих GPS станций возможно исследовать и предупреждать землетрясения. Например, в Чили после прошедших трагических событий планируется построение сети GPS станций состоящей из 20 приемников, которые будут наблюдать 300 сейсмоопасных районов. На Камчатке активно применяют сеть перманентных станций (6 станций) для исследования сейсмоактивности вулкана «Безымянный». В Японии при помощи GPS сетей исследуют, прогнозируют и предупреждают цунами.
Перманентные GPS станции не новинка, они активно используются в США и Европе. В России существует множество локальных GPS сетей с небольшой площадью охвата (г. Тула, г. Пермь, г. Краснодар, г. Санкт-Петербург, г. Москва и т. д.).
В Украине на данный момент действуют две масштабных перманентных GPS сети:
1. Сеть постоянно действующих GNSS станций Украины. В настоящий момент состоит из 15 (в том числе 3 в Крыму: Евпатория, Симеиз и Кацивели) станций и операционного центра (Главная астрономическая обсерватория НАН Украины).
Операционный центр выполняет функции сбора измерительных данных, их периодической обработки и обеспечивает взаимодействие сети с международными организациями (IGS, EPN, MGN).
Данные пересылаются во внутреннем бинарном формате к Операционному центру данных Главной астрономической обсерватории Национальной академии наук Украины, где они конвертируются в формат Compact RINEX и отсылают в Региональный центр сбора данных BKG в Федеральное агентство картографии и геодезии, г. Франкфурт-на-Майне, Германия и в Локальный центр сбора данных EPN в Институт космических исследований (OLG), г. Грац, Австрия.
2. Закарпатская сеть ZAKPOS, состоящая из 11 станций из которых уже пять станций зарегистрированы под украинским флагом в базе EUPOS. По своей сути это региональная GNSS система наземного базирования, которая работает по европейским стандартам и обеспечивает GNSS данными наблюдений и поправками к ним в реальном времени (RTK) для высокоточного определения местоположения. Аналогичные системы действуют во многих странах мира, ближайшие к нам являются активные сети референцных станций SKPOS (Словакия), CZEPOS (Чехия), APOS (Австрия), SAPOS (Германия), ASG-EUPOS (Польша) и т. д.
В г. Харькове действует региональная перманентная сеть, состоящая из 5 станций, покрывающая город Харьков и часть Харьковской области (примерно в радиусе 50 км от Харькова).
Существуют также одиночные перманентные GPS станции в г. Одесса, г. Ровно (Академия водного хозяйства), г. Феодосия, г. Днепропетровск (Национальный горный университет), г. Киев и т. д.
Перечень GPS станций на территории Украины (данные на 01.01.2010 г.):
- Север: GLSV (Киев/Голосеево) — IGS, EPN;
- KIRS (Киев/НАУ) — СКНОУ;
- KIEW (Киев/север);
- CNIV (Чернигов) — EPN;
- CHRS (Чернигов) — СКНОУ;
- PRYL (Прилуки).
Центр: POLV (Полтава) — IGS, EPN; SMLA (Смела) – EPN; VNRS (Винница) – СКНОУ; KRRS (Кировоград) – СКНОУ; DNMU (Днепропетровск).
Запад: SULP (Львов) — IGS, EPN; UZHL (Ужгород) — IGS, EPN; DNRS (Дунаевцы) – СКНОУ; JVRS (Яворов) – СКНОУ; MKRS (Мукачево) – СКНОУ; MUKA (Мукачево) – ZAKPOS; VBER (Великий Березный) – ZAKPOS; MIZG (Межгорье) – ZAKPOS; HUST (Хуст) – ZAKPOS; RAHI (Рахов) – ZAKPOS; SHAZ (Шацк); RVNE (Ровно); TERN (Тернополь); FRAN (Ивано-Франковск); CRNI (Черновцы) плюс станции RTK-сети во Львовской обл.: Николаев, Самбор, Сколе, Старычи.
Восток: KHAR (Харьков) — IGS, EPN; KHRS (Харьков) – СКНОУ; KHBA (Харьков) — НГЦ. NET; SURE (Харьков/ХНУРЭ); ALCI (Алчевск) – EPN; LGRS (Луганск) – СКНОУ; CHUG (Чугуев) — НГЦ. NET; ZOCH (Золочев) — НГЦ. NET; VLCH (Волчанск) – НГЦ. NET.
Юг: MIKL (Николаев) — IGS, EPN; CRAO (Симеиз) — IGS, MGN; EVPA (Евпатория) – EPN; EVRS (Евпатория) – СКНОУ; FDRS (Феодосия) – СКНОУ; SVRS (Севастополь) – СКНОУ; KTVL (Кацивели) плюс станции сети ООО «Синергия»: Запорожье, Орехов.
3.3. Создание перманентной сети.
Цель работы: рассмотреть методику создания и применяемое оборудование, систему функционирования и структуру GPS сети.
Развитие перманентной сети базовых GPS станций в Крыму возможно по трем сценариям: 1.Полностью за счет бюджетных средств. Этот вариант маловероятен, т. к. требует большого количества денежных средств и в условия высокой коррумпированности власти качественно выполнить этот проект невозможно. 2. За счет отечественных и иностранных инвесторов. На мой взгляд, тоже проблематично, т. к. крупные финансовые вложения на длительный срок в новый проект мало кто захочет вкладывать. 3. За счет коммерческих организаций. Считаю, что самый реальный вариант для современного Крыма. Но и тут, если внедрять данные технологии масштабно, т. е. в сферы туризма, транспорта, мониторинга и т. д. не обойтись без государственной поддержки.
На сегодняшний день в АР Крым функционируют 5 перманентных станций: 2 в Евпатории и по одной станции в Кацивели, Симеизе и Феодосии. Также имеются закрепленные, но не постоянно функционирующие станции в Симферополе и Севастополе. Необходимо отталкиваться при развитии сети от этих станции.

Рисунок 20.Станция перманентной сети в г. Евпатория, на территории квантовой оптической системы «Сажень».
 Применяемое оборудование: в качестве базовых станций предлагаю использовать такой приемник, который бы не требовал использования компьютеров и, соответственно, операторов на самой станции. Передача данных наблюдений из референцной станции должна происходить без вмешательства оператора непосредственно в вычислительный центр через коммуникационные линии связи. Для такого варианта возможный круг GNSS-оборудования сильно сужается. На мой взгляд, целесообразней в таких случаях не экономить и выбирать наиболее проверенного производителя и модель, например – двухчастотные 72-х канальные GPS/ГЛОНАСС приемники Trimble NetR5 и антенны Zephyr Geodetic Model II (ZAKPOS применяет аналогичную комплектацию).
Применяемое оборудование: в качестве базовых станций предлагаю использовать такой приемник, который бы не требовал использования компьютеров и, соответственно, операторов на самой станции. Передача данных наблюдений из референцной станции должна происходить без вмешательства оператора непосредственно в вычислительный центр через коммуникационные линии связи. Для такого варианта возможный круг GNSS-оборудования сильно сужается. На мой взгляд, целесообразней в таких случаях не экономить и выбирать наиболее проверенного производителя и модель, например – двухчастотные 72-х канальные GPS/ГЛОНАСС приемники Trimble NetR5 и антенны Zephyr Geodetic Model II (ZAKPOS применяет аналогичную комплектацию).
Точность в статике и быстрой статике 5 мм + 0,5 мм/км в плане и 5 мм + 1 мм/км по высоте; в кинематике с PP, кинематике в реальном времени 10 мм + 0,5 мм/км в плане и 20 мм + 1,0 мм/км по высоте.
Из сетевого программного обеспечения можно выбирать из трех вариантов: Trimble Navigation Limited (Trimble networking software — GPSNet + RTKNet, США), ООО «Geo + +» (GNSMART Professional, Германия) и Leica Geosystems (Leica GNSS Spider Software, Швейцария).
Третий вариант отпадает через конкретный выбор GNSS-оборудования в пользу Trimble. С программным обеспечением GNSMART Professional возникает проблема из-за отсутствия представительства производителя в Украине. Поэтому в качестве программного обеспечения выбираем Trimble networking software — GPSNet + RTKNet.
Основные этапы создания сети:
1. Выбор места установки GNSS-антенны и создание необходимых условий для безопасного функционирования (прокладка кабеля от антенны до специального шкафа, где размещен GNSS-приемник с коммуникационным оборудованием и подключение последнего к линии Интернет-связи).
Следует выбирать места установки в крупных населенных пунктах на общественных зданиях, например на зданиях Укртелекома. Допускается установка только на строения из кирпича или железобетона. Здание должно быть построено не менее чем за 5 лет до установки знака (за этот период происходит начальная усадка здания).
Сооружение, на котором устанавливается знак, не должно иметь видимых трещин на внутренних и внешних стенах. Не рекомендуется использовать здания выше двух этажей. Недопустимо использовать деревянные сооружения и конструкции с металлическим каркасом или металлическими несущими стенами (ангары и т. п.).
Это позволит минимизировать движение из-за температурного расширения/сжатия и многолучевое распространение. Расчетный период эксплуатации пункта позиционирования 15 лет, поэтому в течении этого времени не должно происходить существенных изменений вокруг принимающей антенны. Радиосигнал, принимаемый антенной и поступающий в спутниковый
навигационный приемник, может быть искажен помехами, исходящими от радио — и электрического оборудования (телевизионные передатчики и приемники, радиостанции, сотовые телефоны и базовые станции, КВ и УКВ передатчики, РЛС, радиорелейные станции, высоковольтные ЛЭП).
Такие источники создают помехи, способные привести к временному или полному срыву слежения за спутником, и даже полной невозможности производить измерения на этом пункте. Всеми средствами следует избегать близкого соседства с таким оборудованием. Все находящиеся вблизи пункта радиосредства обязательно должны быть указаны в паспорте пункта Расстояние между станциями сети 50-70 км.
Рекомендации по закреплению антенны. Использовать для крепления стойку из нержавеющей стали (профиль — уголок или труба).
Использование алюминиевых сплавов нежелательно, поскольку коэффициент линейного расширения алюминия в два раза больше, чем у железобетона. Стойку следует крепить болтами непосредственно к несущей стене здания, оптимальным местом размещения является угол, сформированный двумя несущими стенами. Крепление стойки на дымовую трубу допускается, только если она особо прочная или заглушена бетоном. Стойка не должна мешать ремонту крыши, что уменьшит вероятность повреждения центра во время ремонта. При креплении стойки сбоку на несущую стену: стойка должна выступать, по крайней мере, на 0.5 метра над верхним срезом крыши и должна быть прикреплена к стене по длине не менее 1 метра тремя или более анкерными болтами. Болты должны проходить прямо сквозь стойку, не допускается применение U — образных креплений, скоб, хомутов. Допускается применение проставок, предотвращающих непосредственный контакт стойки со стеной. При креплении стойки в несущую стену: болт или арматурный стержень следует закладывать в несущую стену. Производимые работы не должны приводить к потере гарантии на крышу.
Необходимо предусмотреть наличие устройства, расположенного между центром (стойкой) и антенной, позволяющего: во-первых, произвести
нивелирование (приведение в горизонт) антенны, и, во-вторых, при замене антенны, новая антенна должна занять то же положение. Альтернативно допускается производить замену антенны таким образом, чтобы положение относительно стенного репера центра можно было измерить с точностью 1 мм. Если антенна просто накручивается на штырь с резьбой, то при замене антенны, скорее всего, не примет то же положение в пространстве или антенна будет ориентирована по-другому. Это может вызвать необходимость повторного определения координат антенны, что нежелательно. Антенная стойка не должна уклоняться от вертикали на угол более 0.15 градуса (или 2.5 мм на метр), такую точность выставки вполне можно добиться даже с использованием строительных уровней. Применение трегеров не допускается, поскольку, как правило, их подъемные винты не оснащены механизмом фиксации.
Длина кабеля от антенны до приемника не должна превышать 30 метров, во избежание потери сигнала.
Антенный обтекатель лучше не использовать, т. к. многочисленными исследованиями было доказано, что он может привести к смещению фазового центра. Следует очищать антенну от загрязнений (не демонтируя ее) не реже 1 раза в год, в зимний период очищать от снега как можно чаще.
2. Рекогносцировка пунктов ГГС и привязка GPS станций. Исходные пункты ГГС предварительно необходимо проконтролировать, особенно на ЮБК. Привязку станций сети производить от 5 пунктов при длительных статических наблюдениях двухчастотными GPS приемниками. Точность привязки станции должна быть около 1-3 мм в плане и 3-5 мм по высоте.
3. Создание сервера приема информации и вычислительного центра. Вычислительный центр — это программно-аппаратный комплекс, предназначенный для управления сетью референцных станций, сбора и архивации данных сети, и выдачи пользовательскому сектору координатно-временной информации, как для режима постобработки (РР), так и для работы в реальном времени (RТК и DGPS).
Обязанности центров управления:
- Сбор данных измерений, произведенных приемниками, объединенными в
местную подсеть.
- Архивирование измерительной информации.
- Преобразование измерительной информации в формат RINEX.
- Контроль качества собранных данных (данные с каждой станции проверяются независимо).
- Формирование сообщений о состоянии станции (диагностика отказов), которые должны сообщаться через систему почтовой службы EUREF.
- Выдача предупредительных сигналов о возникновении отказов для привлечения внимания обслуживающего персонала.
- Пересылка файлов с данными измерений (часовых и суточных интервалов) в Центры Хранения Данных по установленному расписанию.
- (при поддержке обмена в реальном масштабе времени) производится передача файлов с измерениями на вещательные узлы. При этом следует использовать формат передачи данных, оговариваемый дополнительно.
Требования к серверу: операционная система Windows Server 2008 Service Pack 1 или новее; Windows Server14 2003, Service Pack 2 или новее; Windows XP Professional, Service Pack 2 или новее; Windows Vista. Для сетей малого и среднего размера допускается использование как 32, так и 64 битовых версий указанных выше операционных систем. Для крупных сетей компания Trimble рекомендует использование 64 битовой версии операционной Windows Server 2008. Центральный процессор (один из перечисленных ниже, обязательна поддержка набора инструкций SSE2 — например. Intel Pentium 4 или новее): один процессор с поддержкой hyper-threading с тактовой частотой не менее 3.0 ГГц; сдвоенный процессор с тактовой частотой не менее 3.0 ГГц, двухьядерный процессор с тактовой частотой не менее 1.5 ГГц, четырёхъядерный процессор. ОЗУ: 3 Гбайт. Не менее 20 Гбайт дискового пространства на диске С:\ для Tnmble VRSNetDBServer, дополнительно 20 Гбайт дискового пространства (конкретное требование определяется количеством станций в сети и размером планируемого архива).
Канал связи со скоростью 100 Мбит/с между компьютерами с установленной распределённой средой Trimble Distributed Environment, канал связи со скоростью 10 Мбит/с между компьютерами с установленной распределённой средой Tnmble Distributed Environment и компьютерами с модулем VPSNet «Рабочее место оператора». Право доступа на чтение и запись системного реестра на всех компьютерах, исполняющих программы Trimble Distributed Environment и Tnmble Database Engine.