
При решении любой задачи управления, осуществляемого человеком или автоматическим регулятором, необходимо, прежде всего, иметь объект управления со всеми его коммуникациями и производственным процессом. Объектом управления может быть: отдельное управляемое техническое устройство, либо управляемый комплекс устройств, либо более простая система управления. В последнем случае более сложная система управления включает в свой состав более простую систему или подсистему, которыми управляет сложная система.
При организации производственных процессов, например, строительного производства часто ставится задача по снижению трудоемкости технологических процессов путем их механизации и автоматизации. Для этих целей применяют строительно-дорожные машины и подъемно-транспортные устройства (СДМ и ПТМ), которые являются объектами автоматизации.
По отдельным видам СДМ решается следующий комплекс задач:
- для землеройных машин циклического действия обеспечивается программное управление и автоматическое определение глубины разрабатываемого грунта, в частности на экскаваторах циклического действия ручное управление остается пока при наборе грунта в ковш, а подъем ковша, поворот и выгрузка с последующим возвратом выполняются автоматически по определенной программе;
- для скреперов, бульдозеров, автогрейдеров осуществляется автоматическое регулирование оптимального использования мощности двигателей и программное управление рабочими органами, так как тяговое усилие скрепера, роторного, траншейного экскаватора и других землеройных машин в процессе резания грунта и заполнения ковша изменяются в широких пределах в зависимости от глубины резания и свойств грунта;
- для землеройных машин непрерывного действия обеспечивается регулирование их скорости движения в зависимости от развиваемых усилий при резании и программное управление работой машин при разработке траншей заданного профиля с учетом рельефа местности и оптимального регулирования загрузки приводных двигателей;
- учет производительности землеройных и землеройно-транспортных машин путем использования устройств для учета физических объемов выполненных работ и вычислительных устройств для непрерывного учета к.п.д.
машины и учета расхода горюче-смазочных материалов;
- для охраны труда и предотвращения аварийного состояния, машины снабжаются системами контроля и аварийными сигнализациями.
Перечень задач по автоматизации машин и механизмов можно продолжить бетоносмесительными и растворосмесительными установками, агрегатами для асфальтобетонных работ, погрузочно-разгрузочными механизмами, подъемными механизмами, свайными механизмами и т.д. Аналогично определяются задачи в других отраслях производства.
Машины для уплотнения грунтов
... его плотности. Машины для уплотнения грунтов По принципу действия на грунт различают машины статического (укатка) и динамического (трамбование и вибрация) ... правильности выбора метода уплотнения, типа машин и режимов их работы. Грунты, разработанные землеройными и землеройно-транспортными машинами, при ... 5 со скребками 6 и двух дышел со сцепными устройствами. Рис.8. Прицепной кулачковый статический ...
Для эффективного решения выделенного комплекса задач и многих других, не упомянутых здесь, необходимо детальное изучение технологических процессов объектов управления, правильный выбор параметров управления и средств автоматизации в соответствии с характеристиками объектов. В результате детального изучения нужно сформировать типовые характеристики объектов, влияющие на процесс управления и качество регулирования, выделить физические величины объекта и принять их в качестве параметров управления.
3.1 Основные свойства объектов регулирования
Объект, включенный в систему управления, получает воздействие окружающей среды (возмущения) и воздействие управляющих устройств (регулирующее воздействие).
Их называют входными воздействиями на объект. Входные воздействия вызывают динамические процессы внутри объекта, определяемые физическими величинами, значения которых контролируются и принимаются за выходной сигнал объекта. Упомянутые физические величины в системе управления называют регулируемыми. Простейший объект регулирования (ОР) имеет одну регулируемую величину. Объект регулирования обычно характерен притоком F1 (подачей) и стоком F2 (расходом) вещества или энергии. Если приток равен стоку, объект находится в равновесии – статический режим. При разности между притоком и стоком в объекте имеет место переходный процесс – динамический режим. Соответственно зависимость между входными и выходными величинами определяется статическими и динамическими характеристиками приведенными выше во втором разделе.
емкость, самовыравнивание и запаздывание.
Под емкостью
Емкость объекта характеризуется коэффициентом емкости, т.е. количеством регулирующего потока энергии или вещества, подводимого к объекту (или отводимого от него), который необходим для изменения параметра регулирования на единицу его измерения. Например, при регулировании температуры двигателя внутреннего сгорания (ДВС) коэффициентом емкости можно считать то количество тепла, которое необходимо ввести в ДВС или вывести из ДВС, чтобы изменить его температуру на 1 О С. Коэффициент емкости ДВС зависит от количества охлаждающей жидкости в системе охлаждения. Это объем водяной рубашки, объем радиатора, объем рабочих цилиндров ДВС, которые в целом определяют аккумулированное количество тепла в ДВС, характеризующее инерцию объекта.
Самовыравнивание
Свойство самовыравнивания характеризуется степенью, которую можно определить как отношение увеличения (уменьшения) подачи возмущающего потока энергии или вещества в объект, необходимого для перевода параметра регулирования от одного установившегося значения до другого установившегося значения к величине изменения параметра регулирования. Чем больше степень самовыравнивания, тем меньше реакция объекта на возмущение и тем легче осуществить регулирование объекта, потому что в этом случае объект сам стремит параметр регулирования к стабильному значению.
Дуговые сталеплавильные печи как объект автоматизированного управления
... человек до 2300. 2. Дуговые сталеплавильные печи как объект автоматизированного управления 2.1 Устройство и работа дуговой сталеплавильной печи Электропечь является сложным электрометаллургическим агрегатом и ... наклона более компактен, чем электромеханический. Гидропривод обеспечивает плавное (бесступенчатое) регулирование движения, но требует более тщательного ухода в процессе эксплуатации. В ...
Проанализируем свойство самовыравнивания на примере простейшей и в то же время наиболее распространенной, современной САР на основе поплавкового регулятора уровня. Она используется в камере карбюратора двигателя внутреннего сгорания и показана на рисунке 12.
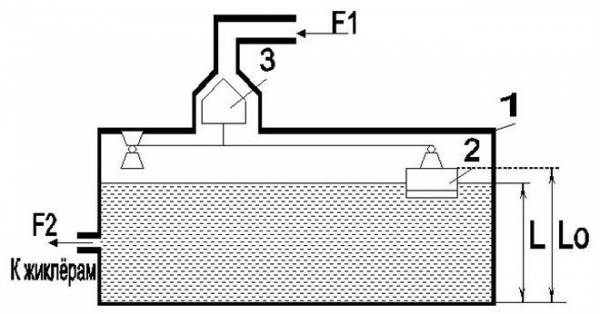
Рисунок 12 – Система с поплавковым регулятором
Объектом регулирования является поплавковая камера 1. Параметр регулирования – уровень L топлива, который измеряется положением поплавка 2 и через систему рычагов с запорной иглой (клапан 3) уровень регулируется притоком топлива F1. Приток F1-регулирующее воздействие.
Проследим свойство самовыравнивания, абстрагируясь от участия регуля-тора в этом процессе.
При уровне L=L0 игла полностью закрывает канал притока , т.е. F1=0. В процессе работы ДВС канал приоткрыт и дает некоторый приток F1. На камеру 1 действует возмущение — расход топлива F2, который самотеком через жиклеры подается в ДВС. Этот расход приводит к снижению уровня в поплавковой камере, что вызывает снижение гидростатического давления высоты столба топлива на жиклеры и соответственно уменьшение расхода F2. Наступит равновесное статическое состояние при F2=F1 и понижение уровня топлива прекратится. Таким образом, в поплавковой камере возник процесс, обеспечивающий самостоятельное стремление уровня к установившемуся значению без участия регулятора. Это и есть самовыравнивание.
Если же расход F2 создать принудительно, например, с помощью специального насоса, то объект не будет обладать свойством самовыравнивания.
Запаздывание
Передаточное запаздывание –это задержка в изменении параметра регулирования Хи за счет движения воздействий в объекте от места его подачи до места установки чувствительного элемента датчика регулятора.
Переходное запаздывание – это замедление в изменении параметра регулирования Хи за счет емкости объекта. Это запаздывание отрицательно сказывается на качестве регулирования, т.к. оно ведет к сдвигу по фазе между выходным и входным сигналом объекта, что в конечном итоге может вызвать неустойчивость регулирования. В этой связи время полного запаздывания учитывают соответствующим коэффициентом в дифференциальном уравнении движения системы и определяют запаздывание так называемой постоянной времени объекта регулирования.
Постоянная времени определяется по проекции касательной к кривой переходного процесса на ось времени, либо по длительности интервала времени, за который переходный процесс выполняется на 63%. При постоянной скорости изменения кривой переходного процесса касательную можно провести в любой точке этой кривой. На рисунке 9 она проведена в начальной точке переходного процесса (момент t 1 ).
Пересечение касательной с уровнем установившегося значения в момент t’1 от начала переходного процесса определяет интервал t1 -t’1 равный постоянной времени (Т).
Электромагнитные переходные процессы в системах электроснабжения
... трехфазных на шинах ВН и НН, а также на стороне 0,4 кВ. Кроме того, будут рассмотрены несимметричные короткие замыкания ... так как он не имеет зависимости от момента времени переходного процесса: Подпитка КЗ со стороны синхронных двигателей мала (меньше 5 ... при конкретных значений Х РАСЧ , определяемое по формуле: X РАСЧ = По расчетным кривым [1,2] для гидрогенератора без автоматического регулирования ...
Чем больше постоянная времени объекта, тем медленнее изменяется параметр регулирования при поступлении воздействия на объект.