
Современный город это динамически развивающаяся система. На его территории постоянно строятся новые дома, заводы и другие объекты, сносятся старые постройки, изменяется количество зеленых насаждений и
т. д. Среди многих задач, связанных с управлением территориями, можно выделить обновление генерального плана, мониторинг застройки и зеленых насаждений. Для их решения необходимо использовать методы и алгоритмы, позволяющие оперативно и достоверно выявить изменения, происходящие на местности.
В зависимости от целей и задач кадастровых работ используют разные геодезические методы, технологии и приборы, при правильном выборе которых эффективность выполнения работ повышается.
Применение воздушных лазерных систем позволяет существенно сократить длительность технологического цикла производства топографических материалов и не требует выполнения наземных геодезических работ по планово-высотному обоснованию результатов аэросъемки.
Таким образом, работа, посвящённая воздушным лазерным системам и их применению при ведении кадастра на землях населённых пунктов, является актуальной.
Целью работы является обобщение и анализ информационных материалов по областям применения, принципам построения и функционирования воздушных лазерных систем, применяемых для топографо-геодезического обеспечения ведения государственного кадастра недвижимости.
Для достижения поставленной цели необходимо решать следующий комплекс задач:
- раскрыть содержание геодезического обеспечения при проведении кадастровых работ: его основные задачи, вопросы межевания земель, точности определения границ земельных участков и располагающихся на них объектов недвижимости;
- рассмотреть основные способы получения топографических материалов, используемых в кадастре: наземные съёмки и дистанционное зондирование Земли;
- провести анализ принципов построения, функционирования и основных характеристик воздушных лазерных средств.
привести основные преимущества и недостатки воздушных лазерных систем.
Объектом исследования являются системы воздушного лазерного сканирования.
Предмет исследования: применение лазерных систем для сканирования застроенных территорий.
- ГЕОДЕЗИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КАДАСТРОВЫХ РАБОТ
1 Основные задачи геодезии в кадастровых работах
Обеспечение Государственного кадастра недвижимости (ГКН) и Градостроительного кадастра, землеустройства и мониторинга земель основывается на картографических материалах, материалах инвентаризации земель, межевания и кадастровых съемок, которые используются при составлении планов земельных участков, прилагаемых к документам, удостоверяющим права на эти участки [28,29].
Описание основных элементов системы вентиляции
... воздушные потоки при этом не смешиваются. Вентилятор Вентилятор — основа любой системы искусственной вентиляции. Он подбирается с учетом двух основных ... воды будет стекать в помещение. Фильтр Фильтр необходим для защиты как самой системы вентиляции, так и вентилируемых помещений от ... шума по воздуховодам. Основным источником шума при работе вентилятора являются турбулентные завихрения воздуха на его ...
Геодезические работы имеют важное значение для создания кадастров, т. к. вся информация о земельных участках и недвижимости должна иметь пространственную привязку. К таким работам относится межевание земель, которое представляет собой комплекс работ по установлению, восстановлению и закреплению на местности границ земельного участка, определению его местоположения и площади. Можно выделить несколько видов топографо-геодезических работ:
- создание фонда картографических и геодезических материалов, включающего топографические карты (планы);
- каталоги координат пунктов государственной геодезической сети (ГГС), съемочных сетей;
- каталоги координат опорной межевой сети (ОМС) и межевых знаков;
- кадастровые карты (планы);
- кадастровые съемки.
В зависимости от назначения кадастра кадастровые съемки производят в тех же масштабах, теми же способами и с той же точностью, что и топографические. Базовым является масштаб 1:500, наиболее широко используемым 1:2000, обзорно-справочным 1:100 000 и мельче [2].
На кадастровых картах и планах изображают:
- границы земельных участков, владений, сельскохозяйственных и других земельных угодий;
- кадастровые номера и наименования земельных участков;
- дают экспликацию (описание) категорий использования земель и другие кадастровые сведения. Кадастровые карты и планы могут не содержать информацию о рельефе местности;
- инвентаризация земель.
В процессе инвентаризации земель и недвижимости, а так же комплексных кадастровых работ осуществляется сбор и анализ имеющихся картографических, кадастровых, землеустроительных, правовых и других материалов, обследуются границы земельных участков, определяется характер использования земель;
- определение площадей земельных участков. Площади земельных участков вычисляют, в основном, аналитическими методами по координатам межевых знаков. В отдельных случаях используют картографические материалы;
— отвод земельных участков. Отвод земельного участка — это процесс установления территориальных границ на основе утвержденного административного решения о предоставлении в пользование (владение) участка заданной площади. Граница земельного участка — это фиксированный пространственный объект, главная функция которого — юридически и технически отделять земли данного участка от земель смежных территорий [6].
По характеру обозначения в натуре или на картографической основе следует различать два типа границ:
- естественная граница — ее положение совмещено с существующими постоянными объектами местности (водоток лощины, бровка оврага, стена капитальной постройки и т. д.);
- такая форма границ не требует специального закрепления на местности, ее отображение на картографической основе получают путем дешифрирования аэрокосмических снимков или методами наземной съемки характерных точек;
- условная граница (≪суходольная≫) — ее линии на местности обозначены специальными межами, закрепленными межевыми знаками.
Для составления кадастровых планов выполняют различные виды топографических съемок в зависимости от назначения кадастра и градостроительных условий города. Особенности кадастровых съемок обусловлены содержанием и точностью кадастровых планов, формой их представления, а также объектами съемок.
Организация кадастрового производства и нормирование труда кадастрового инженера
... о земельных участках и территориальных зонах как основных единиц кадастрового учета. Все прочие действия (например, ведения основного и текущего учета земель, составление баланса земель, бонитировка почв и экономическая оценка земель, государственное управление земельными ресурсами) ...
Тахеометрическая, фототопографическая и аэрокосмическая съемки, а также спутниковые технологии находят широкое применение в кадастре.
Кадастровые планы различного назначения и масштабов составляют
на земельный участок или соответствующую учетную единицу (город, район, квартал, улицу), их стыковка осуществляется по общим границам.
Тематические кадастровые карты (почвенная, геоботаническая и др.) — создаются на основе карты земель района и отображают информацию, соответственно, о видах и свойствах почв, а также о растительности.
Кадастровые планы городов должны составляться в единой государственной системе координат[1], что позволяет обеспечить создание единого банка данных и возможность хранения информации об объектах в виде цифровых данных.
В настоящее время для сбора и обработки информации о территориях
с плотной городской застройкой и большими массивами прилегающих земель используются спутниковые технологии ГЛОНАСС / GPS в комбинации с цифровыми фотограмметрическими системами, например, PHOTOMOD (Россия) и др. [7].
1.2 Земельно-кадастровые работы
В соответствии с Федеральным законом «О Государственном кадастре недвижимости» межевой план представляет собой документ, который составлен на основе кадастрового плана соответствующей территории или кадастровой выписки о соответствующем земельном участке. В межевом плане должна быть отражена определенная информация, внесенная в Государственный кадастр недвижимости, и указаны сведения об образуемом земельном участке или земельных участках, либо о части или частях земельного участка, либо новые сведения о земельном участке или земельных участках, необходимые для внесения в Государственный кадастр
недвижимости. В результате кадастровых работ по разделу, перераспределению или выделу из существующих земельных участков или из земель, находящихся в муниципальной (государственной) собственности,
возникают образуемые земельные участки. Кадастровые работы так же проводятся и в связи с уточнением местоположения границ или площади существующего участка. Измененными считаются земельные участки, в отношении которых проведен выдел в счет доли собственности, либо после раздела единого землепользования.
Межевание земельного участка — комплекс работ по установлению,
восстановлению на местности границ земельного участка с закреплением поворотных точек межевыми знаками и определением их плоских прямоугольных координат, а также площади земельного участка.
Межевание проводят:
- на техническом этапе реализации утвержденных проектных решений о месторасположении границ земельных участков при образовании новых или уточнении существующих землепользователей;
- для уточнения местоположения на местности границ земельного участка при отсутствии достоверных сведений об их местоположении путем согласования границ на местности;
- для выполнения работы по восстановлению на местности границ земельного участка при наличии в Государственном кадастре недвижимости сведений, позволяющих определить положение границ на местности с нормативной точностью межевания.
Основаниями для проведения межевания могут служить:
- постановления федеральных органов исполнительной власти, органов исполнительной власти субъектов Российской Федерации или органов местного самоуправления о проведении межевания;
- задания на проведение межевания;
- судебные решения.
Состав работ при межевании земельных участков обычно включает:
- подготовительные работы;
- составление технического проекта;
- уведомление лиц, права которых могут быть затронуты при проведении межевания (если нужно);
- определение положения границ земельного участка на местности, их согласование (если необходимо) и закрепление межевыми знаками;
- межевую съемку земельного участка;
- определение площади объекта землеустройства;
- составление межевого плана с актом согласования местоположения границ земельного участка в случае выполнения кадастровых работ с целью уточнения границ;
- формирование межевого плана;
- утверждение межевого плана у заказчика.
При межевании должны быть учтены данные Государственного кадастра недвижимости, правоустанавливающих документов, а также других документов, связанных с использованием, охраной и перераспределением земель.
Работы по межеванию земельного участка выполняют на основании договора подряда на выполнение кадастровых работ утвержденного заказчиком, в котором указывают:
- месторасположение (адрес) земельного участка и его площадь;
- основания для проведения межевания;
- сведения о кадастровом инженере.
Межевую съемку земельных участков выполняют традиционными
геодезическими способами, которые используют при топографической съемке местности [6].
Так же определение координат характерных точек границ земельных участков, а так же расположенных на них объектов недвижимости, может производиться методом спутниковых геодезических измерений, фотограмметрический, картометрическим и аналитическим методом с точностью не ниже указанной в таблице 1.1. При определении местоположения характерных точек фотограмметрическим и картометрическим методами величина среднеквадратической погрешности (СКП) принимается равной 0,0005 м в масштабе картматериала [25].
Состав межевого плана в зависимости от вида кадастровых работ, связанных с образованием земельных участков различными способами, различается. Земельные участи могут быть образованы:
- из земель, находящихся в государственной собственности;
- в результате раздела исходного земельного участка;
- в результате раздела выдела земельного участка в счёт доли в общей долевой собственности;
- в результате объединения земельных участков;
- в результате перераспределения исходных земельных участков;
— Например, при земельно-кадастровых работах, связанных с образованием земельных участков из земель, находящихся в государственной или муниципальной собственности, неотъемлемой частью отчёта о проведены работах будет являться схема расположения земельного участка на кадастровом плане территории. Либо, если для размежёвываемой территории принят проект межевания территории, то границы участка будут устанавливаться в соответствии с ним.
Таблица 1.1 — точность определения границ земельного участка
|
Категория земель, разрешённое использование |
СКП, не более, м |
|
Земли населённых пунктов |
0,10 |
|
Земли сельхозназначения и предоставленные для ЛПХ, дачного хозяйства, огородничества, садоводства, ИЖС, индивидуального гаражного строительства |
0,20 |
|
Остальные земельные участки из земель сельхозназначения |
2,50 |
|
Земли промышленности и иного спец.назначения |
0,50 |
|
Земли особо охраняемых территорий и объектов (ООТиО) |
2,50 |
|
Лесной фонд, водный фонд, земли запаса |
5,00 |
|
Остальные земельные участки |
2,50 |
При образовании земельного участка путём объединения двух исходных участков, стоящих на кадастровом учёте, геодезические работы могут вообще не проводиться, соответственно, в состав межевого плана не будет включаться схема геодезических построений и т.д.
- ХАРАКТЕРИСТИКА ВОЗДУШНЫХ ЛАЗЕРНЫХ СИСТЕМ
1 Основные характеристики воздушных лазерных систем
1.1 Аэросъемочная система лазерного картографирования ALTM 3100
Лазерный сканер — это прибор, выполняющий измерения с помощью лазерного излучения. В настоящее время в большинстве случаев используется семейство аэросъемочных систем лазерного картографирования класса ALTM Существует множество разновидностей данных сканеров [23].
Основные возможности данного класса сканеров:
- фиксация интенсивности отраженного сигнала (возможность работы в ночное время);
- фиксация до 4 отражений одного посланного импульса (возможность разделения верха растительности и поверхности земли);
- самая высокая производительность из коммерчески доступных на сегодняшний день систем лазерного картографирования (например, производительность авиационного лазерного локатора ALTM 3100 — до 1000 кв.км. за один рабочий день);
- интегрируемость с цифровыми камерами, гиперспектральными сенсорами, регистраторами формы волны импульса для получения новых комплексных типов данных;
- возможность использования с приемниками GPS и GPS/GLONASS различных производителей;
- наличие согласованной схемы установки на отечественные летательные аппараты;
- адаптация к российским условиям;
- высокая экономическая эффективность использования в тех условиях, когда применение других методов крайне затруднительно, невозможно или ограничено сезонными факторами (безориентирная местность, сплошная листва, очень «плоский» рельеф и т.д.);
- высокопроизводительное программное обеспечение для предварительной обработки лидарных данных DASHMap со встроенным 3D просмотром для визуализации и вывода XYZI данных;
— навигационное программное обеспечение ALTM-NAV с возможностью использования цифровой модели рельефа (ЦМР) при планировании, отображением в реальном времени снимаемой территории, с прямым экспортом результатов в Googletm Earth и другие приложения.
Лазерный сканер ALTM поставляется с опциями компенсации крена, расширенной дивергенции и регистрации интенсивности и включает:
Бортовой навигационный комплекс.
Бортовой комплекс геодезического обеспечения GPS/GLONASS.
Приемник GPS Trimble 75 .
Воздушный лазерный сканер ALTM 3100 показан в приложении А.
Технические характеристики воздушного лазерного сканера ALTM 3100 представлены в таблице 2.1.
Таблица 2.1 — Технические характеристики воздушного лазерного сканера ALTM 3100
|
Параметры |
Значение |
|
|
Частота зондирующего импульса |
33 кГц 50 кГц 70 кГц 100 кГц |
|
|
Высота полета при съемке |
от 80 до 3500 м |
|
|
Точность сканирования по высоте |
не хуже 15 см при высоте 1200 м не хуже 25 см при высоте 2000 м не хуже 35 см при высоте 3000 м |
|
|
Точность определения планового положения точек |
лучше чем 1/2000 от высоты съемки |
от 0 до 93% от высоты съемки |
|
Разрешение по дальности |
1 см |
|
|
Количество регистрируемых отражений лазерного импульса |
4, включая последний |
|
|
Регистрация интенсивности |
12 бит динамический диапазон для каждого измерения |
|
|
Угол сканирования |
от 0 до +250 |
|
|
Компенсация крена |
Номинально ±50, в зависимости от текущего значения поля зрения |
|
|
Ширина полосы захвата |
От 0 до 0,93×Нм |
|
|
Частота сканирования |
0-70 Гц, зависит от угла сканирования |
|
|
Распределение отражений на поверхности земли |
Равномерно на протяжении 96% линии сканирования |
|
|
Используемый бортовой навигационный комплекс |
Applanix POSAV, модифицирован |
|
|
Бортовой GPS приемник |
Trimble 750 |
|
|
Расходимость лазерного луча |
0,3 мрад или 0,8 мрад |
|
|
Категория лазера |
Class 4 |
|
|
Высота безопасного зрения |
200 м при 0,7 мрад 400 м при 0,2 мрад |
|
|
Влажность |
0-95% без конденсата |
|
|
Потребление |
28 В переменного тока, 24 А в среднем, 35 А пиковое потребление |
|
|
Диапазон рабочих температур: -сканирующий блок -стойка управления -при термостабилизации |
от -100С до +350С от +100С до +350С от -300С до +550С |
|
|
Габариты/Вес: -сканирующий блок -стойка управления |
26×19×57см/23,4кг 65×59×49см/53,2кг |
Аэросъемочная система лазерного картографирования ALTM 3100 самая точная, производительная и экономически эффективная (в своем классе) на сегодня система лазерного картографирования.
1.2 Воздушный лазерный сканер RIEGL LMS-Q680
Воздушный лазерный сканер RIEGL LMS-Q680 объединяет в себе мощный лазерный источник и запатентованную цифровую обработку полной формы волны RIEGL. Такая комбинация позволяет работать на больших высотах полета и поэтому идеально подходит для воздушного сканирования сложных территорий [23].
LMS-Q680 дает доступ к подробным параметрам цели, путем оцифровки эхосигнала онлайн во время сбора данных, а также последующего анализа формы волны в режиме оффлайн. Этот метод является особенно ценным при выполнении сложных задач, таких, как определение высоты укрытий или классификация целей. Многократная обработка по времени позволяет использовать эхосигналы от цели, которые были пойманы вне диапазона однозначности, между двумя последовательными импульсами лазера.
Рабочие параметры RIEGL LMS-Q680 можно сконфигурировать так, чтобы охватить широкую область применения. Широкие возможности интерфейса позволяют легко интегрировать прибор в полную (законченную) систему воздушного сканирования. Воздушный лазерный сканер RIEGL LMS-Q680 показан в приложении Б.
Технические характеристики воздушного лазерного сканера RIEGL LMS-Q680 представлены в таблице 2.2.
Сканер является исключительно надежным и прочным устройством, идеально приспособленным для установки на летательный аппарат. Кроме того, он имеет компактную конструкцию и небольшой вес, достаточный для установки на одномоторные аэропланы, вертолеты и беспилотные летательные аппараты. Для работы прибора необходимы только источник питания и сигналы синхронизации GPS с целью обеспечения оперативного контроля при регистрации точно привязанных ко времени и оцифрованных эхо-сигналов. Регистратор данных RIEGL Data Recorder обеспечивает надёжную запись и сохранность данных в процессе измерения.
Таблица 2.2 — Технические характеристики воздушного лазерного сканера RIEGL LMS-Q680
|
Параметра |
Значение |
|
|
Частота зондирующего импульса |
80 кГц 120 кГц 180кГц 240 кГц |
|
|
Высота полета при съемке |
от 1000 до 1600 м |
|
|
Погрешность |
20 мм |
|
|
Отражательная способность |
20% |
|
|
Длина волны лазера |
Ближний ИК диапазон |
|
|
Регистрация интенсивности |
16 бит динамический диапазон для каждого измерения |
|
|
Угол сканирования |
от 0 до +600 |
|
|
Компенсация крена |
Номинально ±50, в зависимости от текущего значения поля зрения |
|
|
Механизм сканирования |
Вращающееся многогранное зеркало |
|
|
Частота сканирования |
до 160 Гц, зависит от угла сканирования |
|
|
Растр |
Параллельные |
|
|
Скорость сканирования |
10-200 разверток в секунду |
|
|
Угловое разрешение считывания |
0,0010 |
≤0,5 мрад. |
|
Потребление |
7А при 24 В постоянного тока |
|
|
Питание |
18-32 В постоянного тока |
|
|
Габариты/Вес: |
480×212×230 мм/17,5 кг |
2 Перспективы развития и внедрения трехмерных ГИС и описания в государственном кадастре недвижимости объектов в трёхмерном
Развитие последних технологий ясно демонстрирует совершенствование методов сбора трехмерных данных о местности и объектах в отношении повышения точности и разрешения. К таким методам относятся: аэрокосмическая съемка и наземная стереофотограмметрическая съемка, воздушное и наземно-лазерное сканирование и GPS-съемка. На данный момент проводится много исследований, направленных на автоматизацию процесса реконструкции трехмерных моделей объектов. Для этих целей разработаны различные подходы, отличающиеся разрешением, точностью и стоимостью. Фотограмметрия является классическим и доминантным подходом для получения трехмерных данных. В этом случае построение трехмерных моделей объектов и картографирование территорий выполняется с использованием стереопар снимков. В последнее время снова возрастает популярность наземной стереофотограмметрической съемки объектов, где цифровые камеры применяются для получения крупномасштабных снимков, например, зданий. С развитием технологии цифровой обработки изображений повышается скорость обработки данных, снижается ее стоимость и увеличивается степень автоматизации процессов распознавания и реконструкции объектов по их изображению [27].
Кроме стереофотограмметрической обработки снимков с целью построения трехмерных моделей местности разработаны новые технологии получения трехмерной информации по одиночному изображению, используя геометрические свойства объектов и законы их отображения на плоскости, тени или комбинацию этих подходов. Эти технологии позволяют ускорить процесс обработки снимков и снизить ее стоимость по сравнению со стереоизмерениями. Имеющиеся на данный момент коммерческие программные продукты дают возможность создавать фотореалистичные модели городов и зданий по одиночным космическим или аэроснимкам. Лазерное сканирование на сегодняшний момент является самым быстрым и автоматизированным способом сбора пространственной информации. Использование воздушного и наземного лазерного сканирования обеспечивает быстрое и точное построение цифровой модели рельефа и определение высоты сооружений. Задача реконструкции сооружений состоит в определении положения и ориентации зданий, их размера, превышения точек местности, высоты крыш и т. д. Модели большинства зданий могут быть описаны достаточно детально с помощью многогранников, т.е. их границы можно представить набором плоскостей и прямых линий. Реконструкция зданий по данным лазерной съемки, также как и большинство задач выделения характерных особенностей изображений, может быть реализована в полуавтоматическом или автоматическом режиме. Полуавтоматические процедуры основаны на использовании набора примитивов для описания стандартных типов зданий и крыш. В этом случае оператор «вписывает» соответствующий примитив в массив точек и соединяет его с общей моделью здания. Различные автоматические процедуры реконструкции зданий помогают оператору измерить отдельные элементы объекта и уточнить трехмерные каркасы моделей [27].
Сложность реконструкции зданий можно уменьшить, интегрируя данные, полученные со снимков и цифровой карты или ГИС. В этом случае информация о плановом положении сооружений берется с карты. Для получения высотной составляющей применяются два похода: используются стереопары снимков, либо данные воздушного лазерного сканирования. Развитие перечисленных методов получения пространственной информации об объектах, а также совершенствование аппаратной и программной части вычислительных систем привело к появлению трехмерных ГИС. Трехмерные ГИС часто называют виртуальными. Виртуальная ГИС может решать практически все задачи, которые на данный момент реализованы в традиционных ГИС. Таким образом, она может использоваться для городского планирования, оценки состояния растительности, почв, водных путей или дорожных участков, предсказания наводнений и многих других задач. Кроме того, возможность получения детального трехмерного вида отдельных объектов и территорий с любой точки открывает новые перспективы для пользователей ГИС. Проектировщики новых зданий и сооружений могут получить комплексный трехмерный вид ландшафта с предполагаемого места строительства объекта или виртуальный снимок спроектированного сооружения с соседнего здания. Архитекторы могут увидеть макет улиц, зданий и парков и, таким образом, определить границы строительных площадок, возможность возникновения дорожных пробок, оценить освещенность улицы в дневное и ночное время и т.д. Опыт выполнения работ по трехмерному лазерному сканированию и моделированию различных по назначению и сложности объектов позволил сделать вывод о следующих достоинствах трехмерных моделей по сравнению с традиционной картой или планом [27].
Информативность. Наличие третьего измерения само по себе говорит о том, что информационная нагрузка трехмерной модели на порядок выше, чем планов и карт. Однако не только этим фактом объясняется высокая информативность трехмерной модели. Во-первых, для города, заводов, площадок сложного технологического оборудования свойственно наличие многоярусных конструкций. Такие объекты из-за наслоения элементов невозможно отобразить детально на плоскости. В этом случае на топографическом плане для многоярусных конструкций, как правило, показывается либо нижний, либо верхний ярус. Во-вторых, многие объекты на плане отображаются в виде точечных условных знаков (например, пожарные гидранты), которые по определению не имеют ориентации. На трехмерной модели такие объекты будут выглядеть аналогично, как на местности (в соответствии с их высотой и направленностью).
Отсутствие подобной информации может быть критическим, например, при проведении оперативных мероприятий по пожаротушению.
Наглядность. Традиционные планы содержат информацию о высоте в виде горизонталей, отметок точек местности и отдельных элементов оборудования, т.е. третья координата здесь представлена как атрибут, подпись или отдельный слой (например, слой цифровой модели рельефа).
Такая форма отображения и хранения информации во многом затрудняет ее интерпретацию, как для человека, так и для вычислительной системы. Установлено, что 50% мозговых нейронов участвуют при обработке зрительной информации. Это говорит о том, что трехмерная визуализация стимулирует больше нейронов, вовлекая большую часть мозга в процесс решения проблемы. Например, при анализе информации с двумерных карт мозг должен сначала построить концептуальную модель рельефа и местности, прежде чем принять какое — либо решение. Трехмерное отображение симулирует пространственную реальность, позволяя наблюдателю более быстро оценивать и понимать ситуацию [27].
Непрерывность. Поскольку отметки на плане показываются только для характерных или контрольных точек, то такую форму графического или электронного представления местности можно назвать дискретной, в то время как трехмерная модель по своей сути является непрерывной. Точность и достоверность. По точности трехмерные модели не уступают, а в ряде случаев превосходят, традиционные карты и планы. Например, метод трехмерного лазерного сканирования и алгоритмы обработки его данных сами по себе подразумевают, что полученная модель будет более точной, поскольку метрические характеристики объектов определяются не по координатам двух-трех пикетов, а по совокупности множества измерений. Например, если по результатам лазерного сканирования построены две плоскости, отображающие стены здания, то, очевидно, что геометрически линия пересечения двух плоскостей будет определена значительно точнее, чем если бы координаты угла здания были получены по одному измерению, тахеометром на отражатель. Кроме того, безотражательный принцип работы сканера исключает ошибку неточной установки отражателя на объект. Запас точности трехмерной модели также вытекает из свойства ее непрерывности, так как плановые координаты и отметки промежуточных точек местности и оборудования можно получить не интерполированием и аппроксимацией, а непосредственным измерением. Например, в ряде стран с высокой стоимостью земли ведется разработка системы трехмерного кадастра, в которой плата за пользование землей рассчитывается не от площади земельного участка, а от его трехмерного объема. Таким образом, трехмерные ГИС рано или поздно вытеснят другие формы представления информации о местности [27].
Так же стоит упомянуть принятое Правительством РФ 01.12.2012 распоряжение №2236-р, утверждающее план мероприятий («дорожную карту») «Повышение качества государственных услуг в сфере государственного кадастрового учета недвижимого имущества и государственной регистрации прав на недвижимое имущество и сделок с ним» [24], которым предусмотрено к 2018 году:
закрепить возможность внесения в государственный кадастр недвижимости сведений об объектах недвижимости (зданиях, строениях, помещениях и объектах незавершённого строительства) с описанием в трёхмерном
определить правила внесения и построения трёхмерных моделей;
- внедрить услугу по возможности внесения указанных сведений.
3 Сравнение традиционных съемок и лазерного сканирования
В настоящее время при проведении геодезических работ все чаще применяются современные лазерные технологии. В основе лазерного сканирования лежит способность луча лазера отражаться от наземных объектов или поверхности земли. Лазерное сканирование позволяет фиксировать абсолютно все особенности рельефа, максимально быстро получать трехмерную визуализацию даже труднодоступных объектов.
Всего в геодезии используются два вида работ: наземное и воздушное лазерное сканирование.
Наземное лазерное сканирование позволяет получать планы высокого уровня детализации, а также создавать трехмерные модели объектов.
При воздушном лазерном сканировании лазерный сканер размещают на воздушном судне, этот способ применяют в различных отраслях — от нефтегазовой промышленности до дорожного хозяйства.
Лазерное трехмерное сканирование делает возможной сплошную съемку объекта с большой скоростью и позволяет за малое время осуществлять большой объем работ с различными объектами, среди которых:
- здания и строения;
- предприятия со сложной структурой, в том числе химические предприятия, нефтегазоперерабатывающие комплексы и т.д.;
- автомобильные и железные дороги и дорожные объекты, в том числе мосты, путепроводы, прилегающие зоны;
- открытые и закрытые горные разработки;
- ситуация и рельеф.
Трехмерное лазерное сканирование представляет собой новейшую технологию, обладающую такими преимуществами, как значительное сокращение сроков выполнения полевых работ, высокое качество и детальность съемки. При этом стоимость геодезических работ, проводимых в соответствии с данной технологией, вплотную приближается к цене традиционных методов. Первым результатом сканирования является облако точек, которое и несет максимум информации об исследуемом объекте, будь то здание, инженерное сооружение, памятник архитектуры и т.п. По облаку точек в дальнейшем, возможно, решать различные задачи:
- получение трехмерной модели объекта;
- получение чертежей, в том числе, чертежей сечений;
- выявление дефектов и различных конструкций посредством сравнения с проектной моделью;
- определение и оценка значений деформации посредствам сравнения с ранее произведенными измерениями;
- получение цифровых топографических планов методом одновременной аэрофотосъемки и воздушного лазерного сканирования.
При топографической съемке сложных промышленных объектов традиционными методами, исполнители часто сталкиваются с тем, что во время полевых работ бывают пропущены отдельные необходимые измерения. Обилие контуров, большое количество отдельных объектов и мелких деталей приводят к неизбежным ошибкам. Материалы, получаемые при лазерном сканировании, несут наиболее полную информацию о метрических данных объекта съемки, исключающую субъективные ошибки геодезиста [12].
Съемкой называется процесс геодезических измерений на местности, выполняемых для составления карт и планов. При горизонтальной съемке определяется взаимное плановое положение контуров и объектов — ситуации местности. Если кроме ситуации снимается рельеф местности, то съемка называется топографической. Наибольшее применение в качестве геодезической подосновы для архитектурно-строительного проектирования имеют топографические съемки крупных масштабов: 1 : 500, 1 : 1000,
: 2000, 1 : 5000 [22,8].
Один из видов наземной топографической съемки, осуществляемой с помощью теодолитов или тахеометров — это тахеометрическая съемка.
Тахеометрическую съемку применяют для создания планов или цифровой модели местности участков в крупном масштабе для ведения государственного кадастра недвижимости, для планировки сельских населенных пунктов, проектирования отводов земель, мелиоративных и противоэрозионных мероприятий, трассирования линейных сооружений и др. [9].
Перед тахеометрической съемкой на основе существующей геодезической сети строят съемочную сеть до густоты пунктов, обеспечивающей положение на территории съемки тахеометрических ходов с соблюдением технических требований, приведенных в таблице 2.1. Поэтому в съемочное обоснование тахеометрической съемки входит построение сетей триангуляции, трилатерации, полигонометрии, теодолитных ходов, обеспечивающей территорию съемки геодезическими пунктами нужной густоты [23].
Таблица 2.1 — Технические требования при проложении тахеометрических ходов
|
Параметры |
Масштаб съемки |
|
|
1 : 5000 |
1 : 2000 |
|
|
Максимальная длина хода, м |
1200 |
600 |
|
Максимальная длина линий, м |
300 |
200 |
|
Максимальное число линий в ходе |
6 |
5 |
Электронную тахеометрическую съемку эффективно применять на открытой равнинной местности, когда с исходной съемочной точки открывается видимость на расстояния 1…2 км. Вследствие значительной дальности действия тахеометра сокращаются затраты труда на развитие съемочного обоснования.
Экономическая эффективность электронных тахеометрических съемок еще и во многом определяется связями технологического процесса. Первый вариант отвечает классической схеме наземных топографических съемок, при которой основные технологические процессы последовательно сменяют друг друга. Численность топографической бригады составляет два человека. Служебную и метрико-семантическую информацию записывают на технический носитель. Обрабатывают результаты измерений и составляют топографические планы электронной тахеометрической съемки в основном в условиях стационарного камерального производства.
Второй вариант электронной тахеометрической съемки отличается от первого тем, что обработку материалов съемки ведут на базе полевой бригады, когда разрыв между полевыми и камеральными работами не превышает нескольких суток.
Третий вариант отвечает принципиально новой схеме организации работ, при которой основные процессы съемки (полевые и камеральные) ведут одновременно. Численность топографической бригады при этом увеличивается на одного человека за счет организации в ближайшем к объекту населенном пункте выездного командно-диспетчерского камерального поста с передачей ему функций регистрации информации на технический носитель, за счет обработки ее по мере поступления и отображения на составляемых тут же топографических планах [11].
Одновременности выполнения полевых и камеральных работ достигают за счет организации радиосвязи между всеми участниками съемки и ее камеральной обработки. Связь осуществляют с помощью мобильных радиостанций. При этом оператор тахеометра управляет перемещением рабочего с отражателем по объекту съемки, принимает семантическую информацию с места установки отражателя и передает ее вместе с метрической информацией на командно-диспетчерский камеральный пост. Оператор командно-диспетчерского камерального поста, находясь в ближайшем от объекта населенном пункте (или кузове специального автомобиля), не только принимает и обрабатывает метрико-семантическую информацию, но и активно управляет плотностью набора пикетов, закрывая «белые пятна» в съемке, а в необходимых случаях требует от оператора тахеометра набора контрольных пикетов и т.п. Одновременность набора и отображения съемочных пикетов на составляемых топографических планах позволяет исключить недостатки, свойственные обычной тахеометрической съемке. При этом за счет большой дальности действия тахеометра значительно увеличивается площадь съемки, выполняемая с одной установки прибора и, как следствие, уменьшается потребность в числе пунктов съемочного обоснования.
Технология электронной тахеометрической съемки дает возможность представить топографические планы как в традиционной графической форме, так и в виде цифровых моделей местности и рельефа, то есть в форме, удобной для исполнения в системах автоматического проектирования [10].
При изысканиях, проектировании, строительстве и эксплуатации инженерных сооружений необходимо еще знать и рельеф местности.
Без знания рельефа местности невозможно проектирование железных и шоссейных дорог, водоотводных (осушительных и оросительных) каналов, гидротехнических сооружений, аэродромов, строительных площадок, населенных пунктов, плотин, полей севооборотов и других объектов.
Знание рельефа выражается прежде всего в знании отметок всех характерных точек местности.
Определение высот точек местности и превышений между ними и есть цель нивелирования.
Нивелирование — вид геодезических работ, в результате которых определяют разности высот (превышения) точек земной поверхности, а также высоты точек над принятой отсчетной поверхностью.
В зависимости от применяемых инструментов и методов различают следующие виды нивелирования: стереофотограмметрическое, барометрическое, гидростатическое, автоматическое, геометрическое и тригонометрическое.
Геометрическое нивелирование основано на применении нивелира, который обеспечивает горизонтальное положение линии визирования. Геометрическое нивелирование может быть выполнено также с помощью тахеометра.
При необходимости передачи высот на большие расстояния прокладываются нивелирные ходы, состоящие из нескольких связанных между собой станций. Путем проложения нивелирных ходов первого — четвертого классов точности создается единая государственная нивелирная сеть, являющаяся высотной основой всех геодезических работ на территории страны. Пункты государственной нивелирной сети закрепляются на местности постоянными знаками — реперами и марками, их отметки публикуются в специальных каталогах.
В развитие государственной нивелирной сети для производства топографо-геодезических работ прокладываются ходы технического нивелирования.
Техническое нивелирование выполняют в одном направлении. Максимальная длина хода технического нивелирования зависит от высоты сечения рельефа h и составляет 1 км при h = 0,25 м; 4 км при h = 0,5 м.
При съемке участка под строительство, а также при обмерах объектов архитектуры высотным обоснованием служит, как правило, нивелирный ход, проложенный по точкам теодолитного хода — теодолитно-нивелирный ход.
В рядах случаев техническое нивелирование выполняют при определении высот вершин квадратов, построенных на местности [13].
Рассмотрим состав работ при проложении нивелирного хода.
Общие точки для смежных станций хода называют связующими. В тех случаях, когда перепад высот между точками не позволяет выполнить измерение с одной станции, выбирают дополнительную связующую точку — x точку и соответственно дополнительную станцию. Если в створе между связующими точками имеются характерные точки перегиба рельефа, их нивелируют. Такие точки называют промежуточными или плюсовыми.
Порядок работы на станции при нивелировании
визирование на заднюю по ходу точку и отсчет по черной стороне рейки;
- визирование на переднюю точку и отсчет по черной стороне рейки;
- отсчет по красной стороне рейки при визировании на переднюю точку;
- отсчет по красной стороне рейки при визировании на заднюю точку;
- визирование на промежуточную точку и отсчет по черной стороне рейки.
Таким образом устанавливается симметрия во времени при наблюдении на заднюю и переднюю точки, что позволяет ослабить влияние атмосферной рефракции на отсчет по рейке.
Значение превышения на станции вычисляют дважды: по черным и красным сторонам рейки. Допустимое расхождение значений превышений — не более 5 мм, в противном случае измерения на станции следует повторить. При работе с электронными тахеометрами и нивелирами с встроенным процессором значения превышений и горизонтальных проложений считывают с экрана дисплея и заносят в электронный журнал.
Тригонометрическое нивелирование производят путем измерения угла наклона визирной линии к горизонту и расстояния между нивелируемыми точками.
Тригонометрическое нивелирование широко распространено при топографической съемке местности, а также при производстве инженерно-геодезических работ. В настоящее время в связи с внедрением тахеометров сфера применения тригонометрического нивелирования значительно увеличилась. Основным преимуществом данного вида нивелирования является возможность определения высот точек без ограничения углов наклона скатов к горизонту, а также дальности расстояний до точек наблюдений [30].
Высоты (отметки) точек и рельеф местности отображаются на картах и планах и служат основой для архитектурно-строительного проектирования, в том числе для составления проектов вертикальной планировки территории, проектов транспортных сетей, инженерных коммуникаций и др. Без нивелирования нельзя осуществить вынос проекта сооружения в натуру, выполнить обмеры архитектурных комплексов.
При наружных обмерах объектов недвижимости, как правило, используют 20…30-метровые стальные рулетки, а также так называемые «лазерные рулетки». Для измерения расстояний в корпус рулетки помещают лазерный электромагнитный дальномер. При измерениях лазерный пучок наводят на отражающую поверхность объекта, до которого измеряют расстояние. Наведение осуществляют визуально, т.е. по «лазерному пятну» или используют для этого закрепленный на корпусе рулетки специальный оптический визир.
При внутренних обмерах эффективнее применять лазерные дальномеры, например, для оценки объекта недвижимости и составления генерального и поэтажного планов, когда внешние условия не влияют на результаты измерений.
Совместив внутреннюю съёмку с внешней и построив по облаку точек нерегулярную сеть, можно получить полноценную трёхмерную модель здания с информацией о толщине стен, отклонениях от плоскости, вертикали и горизонтали. По полученной модели, можно проводить различные измерения, строить сечения, рассчитывать количество строительных материалов для реставрации и реконструкции [32].
Быстро и качественно получить трехмерную модель местности, а также зданий, сооружений и т.п. можно с помощью лазерного сканера.
Лазерное сканирование с успехом применяется в самых различных областях деятельности:
в промышленном, гражданском и транспортном
в нефтегазовой отрасли;
- в подземном строительстве, прежде всего в тоннелестроении, там, где требуется высокая точность и максимально полная информация об объекте. Затраты на проведение измерений в этом случае сокращаются в десятки раз, а получаемая точность соответствует принятым нормам;
- в машиностроении;
— в архитектуре, археологии и музейном деле (сканирование необходимых для отрисовки фасадных чертежей тонких архитектурных элементов зданий, размер деталей которых составляет миллиметры или первые сантиметры).
При съёмках зданий, представляющих историческую и культурную ценность, такая задача возникает довольно часто.
Лазерное сканирование позволяет быстро получить трехмерную модель местности, а также зданий, строений, сооружений и т.д. Движущийся лазерный луч сканирует объект за несколько секунд. По сравнению с векторной трехмерной моделью растровая модель имеет ряд преимуществ, так как готова сразу после сканирования, занимает большее пространство и стоит дешевле. По сравнению с фотограмметрическими способами съемки лазерное сканирование позволяет получить пространственные координаты с одной точки стояния без последующей камеральной обработки, причем имеется возможность провести контрольные измерения непосредственно в полевых условиях. При этом достигается более высокая точность работ. Лазерное сканирование может выполняться как с воздуха (с борта самолета, вертолета), так и с поверхности Земли.
Рассмотрим воздушное лазерное сканирование [21].
Принцип функционирования воздушных лазерных систем представлен на рисунке 2.1. В качестве излучателя используется полупроводниковый лазер, как правило, ближнего инфракрасного диапазона, работающий в импульсном режиме. В каждом акте сканирования регистрируются наклонная дальность до точки отражения и значение угла, определяющего направление распространения зондирующего луча в системе координат локатора. В зависимости от типа сканирующей системы могут фиксироваться более одного (до пяти) отражений для каждой линии визирования. Такая возможность способствует получению более информативных лазерно-локационных изображений, так как в одном акте сканирования могут быть получены отклики сразу от нескольких компонентов сцены: первые отклики будут получены за счет отражений от листвы растительности, проводов и опор линий электропередач, кромок зданий, а последний отклик, как правило, соответствует поверхности земли или другой твердой поверхности, например, крыше здания. Траектория движения носителя регистрируется бортовым приемником GPS (ГЛОНАСС).
В сочетании с замеренными значениями наклонной дальности и угла сканирования это позволяет непосредственно получить абсолютные геодезические координаты элементов сцены, вызвавших отражение зондирующего луча. С некоторыми упрощениями современный лазерный сканер можно определить как «сканирующий лазерный дальномер с навигационным обеспечением». Все основные структурные компоненты, составляющие лазерный сканер, такие как дальномерный блок, GPS, инерциальная система всесторонне изучены и уже много лет активно эксплуатируются.
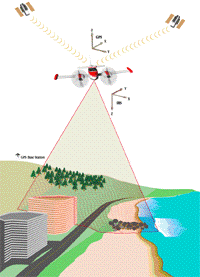
Рис. 2.1 — Принцип функционирования воздушных лазерных систем
Целесообразность использования новой технологии в различных приложениях основывается на ее уникальных возможностях. Среди отличительных особенностей воздушного лазерного сканирования можно выделить три основных.
Во-первых, производительность воздушного лазерного сканирования чрезвычайно высока. На практике достигнута производительность съемки линейных объектов в 500-600 км за один аэросъемочный день. Здесь следует отметить, что камеральная обработка результатов съемки, как правило, по продолжительности сравнима со временем выполнения авиационных работ, что позволяет выполнять такую обработку оперативно на месте проведения работ. Это, в свою очередь, позволяет эффективно контролировать качество съемки и при необходимости выполнять повторную съемку.
Во-вторых, воздушное сканирование не требует выполнения наземных геодезических работ по планово-высотному обоснованию результатов аэросъемки. Необходимость выполнения таких работ может составить серьезную проблему при реализации традиционных методов съемки, особенно для удаленных и труднодоступных районов.
В-третьих, непосредственное получение трехмерных моделей рельефа и всех наземных объектов, а также возможность выполнения по ним геометрических измерений.
Использование воздушных лазерных систем для решения данных задач городского кадастра предполагает получение геопространственных данных двух основных видов: данных для аналоговых и цифровых аэрофотоснимков и собственно результатов лазерно-локационной съемки. Цифровые аэрофотоснимки по своему информационному содержанию и методике использования мало отличаются от традиционных аэрофотоснимков, получаемых с помощью традиционных пленочных камер. Конечно, использование цифровой аэрофотосъемочной техники позволяет добиться значительно более высокого фотографического и фотограмметрического качества, а также существенно сократить длительность технологического цикла производства топографических материалов.
Получение данных для аналоговых и цифровых аэрофотоснимков заключается в определении их элементов внешнего ориентирования аэрофотоснимков и измерение наклонной дальности съемки на борту летательного аппарата.
Определение элементов внешнего ориентирования аэрофотоснимков на борту летательного аппарата состоит в следующем: угловые элементы внешнего ориентирования определяют с помощью инерциальных систем навигации, а координаты центров проекций находят по показаниям GPS-приемников. На практике эта задача сегодня решается почти исключительно с использованием интегральных навигационных GPS/IMU (аббревиатура IMU есть InertialMeasurementUnit, или в переводе инерциальное измерительное устройство) комплексов. Такие комплексы получили название системы прямого геопозиционирования, т. е. обеспечивают возможность полного решения задачи геопозиционирования без привлечения других источников данных.
Идеология использования GPS/IMU систем при съемке с любых летательных аппаратов предполагает их полностью автономное функционирование от съемочного оборудования. Это чрезвычайно важное обстоятельство позволяет использовать такие системы в паре с практически любыми аэросъемочными средствами — аналоговыми и цифровыми аэрофотоаппаратами, воздушными лазерными сканерами, радиолокаторами, инфракрасными и спектрозональными приборами и др. В процессе аэросъемки эти приборы могут работать совершенно независимо на аппаратном уровне. Необходимо обеспечить только их синхронность или более точно временную определенность событий, чего в нынешних условиях нетрудно добиться благодаря использованию GPS/GLONASS технологий. Применительно к аэрофотоаппарату последнее требование означает, что время совершения каждого аэрофотоснимка должно быть определено во временной шкале, единой с POS/AV комплексе. На практике это достигается регистрацией импульса срабатывания затвора аэрофотоаппарата через один из специальных EVENT входов комплекса. Аналогично выполняется синхронизация с авиационным импульсным лазерным дальномером.
Точность определения текущих координат центра съемки, элементов внешнего ориентирования и наклонной дальности (от центра съемки до точки) с помощью перечисленной бортовой аппаратуры приведена в таблице 2.2 [5].
В сочетании с измеренными значениями наклонной дальности и угла сканирования, точность определения позволяет непосредственно получить абсолютные геодезические координаты точек пространства, вызвавших отражение зондирующею луча.
Другим методом крупномасштабного топографического картографирования городских территорий является комплексная обработка лазерно-локационных данных, получаемых с помощью лазерного сканера, и результатов цифрового фотографирования.
Таблица 2.2 — Точность определения текущих координат центра съемки, элементов внешнего ориентирования и наклонной дальности
|
Определяемый параметр |
Используемая аппаратура |
Точность |
|
Пространственные координаты носителя |
GPS |
8-10 см |
|
Наклонная дальность |
Импульсный лазерный дальномер |
3-5 см |
|
Угловые координаты зондирующего пучка лазерного излучения |
Импульсный лазерный дальномер |
1 мрад |
|
Ориентация приборов |
Инерциальная система |
1-2 мрад (ошибка позиционирования 15-30 см) |
|
Суммарная ошибка определения координат точек |
Весь бортовой комплекс |
20-40 см |
Роль лазерно-локационных данных в рассматриваемом методе создания и обновления топографических карт и планов городских территорий существенно отличается от традиционной. При реализации метода аэросъемочные работы могут проводиться различными подходами: параллельный и последовательный сбор геопространственных данных. Данные подходы изображены на рисунке 2.2[15] .
Как именно осуществляется сбор данных, параллельно или последовательно, не имеет принципиального значения.
Лазерные сканеры, установленные на борту летательного аппарата, осуществляют сканирование местности вдоль маршрута. Ширина полосы съемки может меняться в широких пределах oт единиц метров до размера, равного 93% высоты съемки. Обычно высот полета при съемке выбирается и пределах от 200 м до 3000 м. Точность определения высоты сканером составляет 5-15 см. Построчное сканирование пучком лазерного излучения осуществляют перпендикулярно маршруту со скоростью несколько тысяч точек в секунду.
Траектория движения носителя регистрируется бортовым приемником GPS для определения текущих координат центра съемки, а для определения элементов ориентирования используется инерциальная система IMU комплекса GPS/IMU.
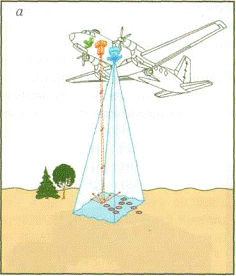
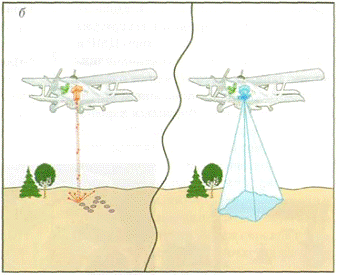
Рис. 2.2- Варианты организации аэросъемочных работ:
- а — соответствует случаю, когда все необходимые технологические компоненты (аэросъемочные средства) размещаются на борту одного носителя;
- б — демонстрирует случай, когда сбор геопространственных данных осуществляется последовательно: сначала выполняется съемка объекта с помощью лазерного локатора, а затем — с помощью аэрофотоаппарата.
3. ПРИНЦИПЫ ПОСТРОЕНИЯ И ПРЕИМУЩЕСТВА ВОЗДУШНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
1 Принципы построения и функционирования воздушных лазерных систем
Сущность дальнометрирования в соответствии с [31] заключается в сравнении одного и того же физического параметра до и после прохождения лазерного излучения измеряемого расстояния. При этом один и тот же сигнал от передатчика направляется на приемник одновременно по двум различным путям: непосредственно на приемник и путь до объекта и обратно, как показано на рисунке 3.1.
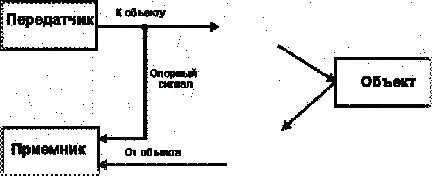
Рис. 3.1 — Общая схема дальнометрирования при использовании лазерного излучения
Первый путь называется опорным каналом, или трактом, а идущий по нему сигнал — опорным сигналом. Второй путь образует канал дальнометрирования и соответственно сигнал, отраженный от объекта называют дистанционным сигналом. В приемнике осуществляется сравнение опорного и дистанционного сигналов по избранному параметру, или, другими словами, измеряется их различие по этому параметру. Так как эти сигналы образованы из одного и того же сигнала передатчика, указанное различие обусловлено только тем, что они проходят различные пути.
Выбор параметра, по которому производится сравнение опорного и дистанционного сигналов, определяет метод измерения расстояния. В соответствии с [31] существуют следующие основные методы: временной (импульсный) и фазовый. Последний метод может быть реализован в двух вариантах: на несущей частоте (т. е. без модуляции) и на частоте модуляции.
При измерении расстояний импульсным методом измеряется непосредственно время распространения коротких, регулярно следующих со сравнительно долгими паузами импульсов, которые излучаются установленным в начале линии приемо-передатчиком, проходят расстояние до отражателя на конце линии и возвращаются к ее началу. Искомое расстояние вычисляется по формуле:
|
|
(3.1) |
где τ- время, измеряемое с момента подачи импульса на источник излучения до момента приема отраженного сигнала.
Отношение периода повторения импульсов ТПк длительности импульсов τи называется скважностью. Используемые для измерения дальности импульсы должны иметь исключительно малую длительность и очень большую скважность (более 1000).
В реальных системах энергия излучается обычно в виде высокочастотной несущей волны, на которую эти импульсы налагаются. Для этого применяется амплитудная или частотная модуляция (при импульсах почти прямоугольной формы говорят об амплитудной или частотной манипуляции).
Вследствие более простой осуществимости и существенно меньшей средней мощности излучения амплитудная манипуляция предпочтительнее; в течение длительности импульса излучаются высокочастотные колебания постоянной амплитуды, а в паузах между импульсами излучение отсутствует (рис. 3.2 б).
При частотной манипуляции амплитуда излучаемых колебаний остается постоянной, а частота изменяется на время длительности импульса (рис. 3.2 в).
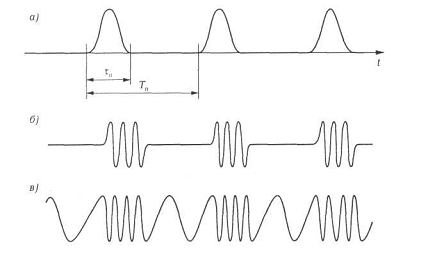
Рис. 3.2 — Форма смодулированных (а) и модулированных по амплитуде (б) и частоте (в) импульсов
Чтобы полученная величина измеряемого расстояния D была однозначной, период следования импульсов должен быть больше времени пробега τ2D импульсом измеряемой дальности туда и обратно. В этом случае отраженный сигнал достигает приемника раньше, чем излучается следующий импульс. Чем короче расстояние, тем выше допустимая частота следования импульсов FП = 1 / ТП.
Требуемая точность измерения времени τ2D определяется из формулы:
|
|
(3.2) |
где mD — среднеквадратическая погрешность определения расстояния.
Для получения сантиметровой точности определения расстояния необходимо измерять время распространения импульса с ошибкой в десятые доли наносекунды [33].
Точность регистрации импульсов зависит от возможностей фиксации опорных точек импульса (которые являются точками начала отсчета при измерении времени пробега) и прежде всего от крутизны фронтов импульса. Возникающие при этом погрешности определения времени пробега в современных радиочастотных системах приводят к ошибкам измерения дальности порядка нескольких дециметров.
Поэтому для точной дальнометрии импульсный метод с использованием радиочастотных импульсов в общем случае оказывается непригодным.
Развитие лазерной техники позволило получать оптические импульсы длительностью от 10 до 0,1 нс. Соответствующие ошибки измерения расстояний при этом составляют от 1 м до единиц сантиметров. Импульсные лазеры позволяют получать более высокие излучаемые мощности, чем лазеры с непрерывным излучением, что дает возможность измерять очень большие расстояния.
Обобщенная структурная схема импульсного лазерного дальномера изображена на рисунке 3.3.
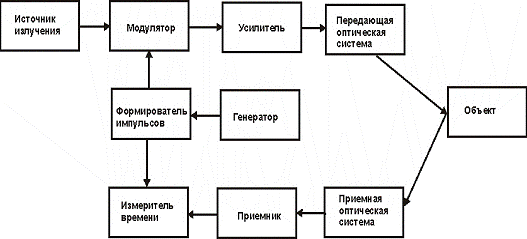
Рис.2.3 — Обобщенная структурная схема импульсного лазерного дальномера
Электромагнитные (световые) волны от источника излучения при помощи модулятора превращаются в импульсы с амплитудной или частотной модуляцией. Модулирующие импульсы поступают на модулятор от формирователя импульсов, который преобразует синусоидальные колебания генератора с постоянной частотой в последовательность импульсов с постоянной и высокостабильной частотой повторения FП. Полученные таким образом сигналы, которые в случае необходимости могут быть усилены усилителем, излучаются передающей оптической системой передатчика.
Передающая оптическая система служит для концентрации излучаемого светового потока в узкий пучок и направления его на объект.
После отражения от объекта лазерное излучение, сконцентрированное при помощи приемной оптической системы, попадает на приемник. Приемник производит преобразование импульсов лазерного излучения в последовательность электрических импульсов. Он должен иметь высокую чувствительность к слабым световым сигналам используемого спектра излучения и способность выделить информационный сигнал на фоне различных шумов и других побочных компонент спектра излучения [33].
Как модулирующие импульсы передатчика, так и принятые импульсы поступают на устройство измерения времени. В современных приборах для измерения времени пробега обычно используется электронный счетчик. В частности, в приборах с импульсными лазерами момент излучения лазерного импульса задается кварцевыми или атомными часами. Часть энергии этого импульса отводится и служит стартовым импульсом при измерении интервала времени. Для этого отведенный импульс по находящемуся внутри прибора световоду подается на фотоприемник, где он преобразуется в электрический импульс, который затем поступает на электронно-счетный измеритель времени пробега, открывая счет временного интервала. Другая часть излученного импульса проходит двойное измеряемое расстояние и через приемную оптическую систему также поступает на фотоприемник, преобразуется в электрический импульс и останавливает счет времени пробега в электронном счетчике, выполняя, следовательно, роль стоп — импульса.
Временной интервал между старт — импульсом и стоп — импульсом представляет собой искомое время пробега.
Достоинства импульсного метода состоят в
время пробега является непосредственным результатом измерений, дальность до объекта пропорциональна времени пробега;
- осуществляется прямое измерение полной дальности, нет необходимости знать ее приближенное значение;
- измерение проводится быстро и дает результат в удобной форме;
- можно измерять расстояния до объектов, не снабженных специальными отражателями, при умеренной потребляемой мощности аппаратуры.
Недостаток импульсного метода — меньшая точность по сравнению с фазовым методом.
Фазовый метод основан на том, что фаза гармонического колебания есть линейная функция времени, и, следовательно, изменение фазы за некоторый промежуток времени будет линейной функцией расстояния, пройденного за это время гармоническим колебанием [31].
Поэтому расстояние Dможно вычислить (при известной скорости распространения лазерного излучения υ), если измерить сдвиг фаз φ2Dна несущей частоте f, возникший в результате прохождения излучения расстояния до объекта и обратно. Величина расстояния определяется из выражения:
|
|
(3.3) |
![]() N- целое число
N- целое число
Формула (3.3) показывает, что измеряемое расстояние равно некоторому числу (N + Δ N) полуволн λ/2. Другими словами, величина λ/2 представляет собой ту линейную меру, при помощи которой проводится измерение расстояния. Поэтому соответствующую длине волны частоту f, к которой относится измеряемый фазовый сдвиг, называют масштабной частотой.
В современных фазовых лазерных дальномерах, как правило, применяется модуляция излучаемых колебаний, и масштабной частотой является частота модуляции.
Это обусловлено следующим. При достаточно высокой частоте излучения (начиная примерно с частот СВЧ диапазона) весьма сложно производить фазовые измерения и резко усложняется, особенно на оптических частотах, определение числа N. Измерения на таких частотах целесообразно выполнять не при помощи фазометра, а регистрируя результат непосредственной интерференции излучаемых и принимаемых колебаний в точке приема, т. е. применяя интерференционный метод измерения расстояний. В этом случае дальномер превращается в интерферометр (СВЧ или оптический).
Интерферометры обеспечивают очень высокую точность измерений, но интерференционному методу присущи специфические трудности и ограничения, и он пока что может использоваться лишь в отдельных случаях для решения специальных задач.
Для фазовых измерений в лазерных дальномерах общего назначения оптимальными, как считается в настоящее время, являются частоты, лежащие в диапазоне 10 — 500 МГц. Однако непосредственное излучение колебаний с такими сравнительно низкими частотами для точных измерений непригодно по ряду причин (отражения от подстилающей поверхности, дифракция, значительные размеры антенн).
Таким образом, возникает противоречие, состоящее в том, что с точки зрения условий излучения и распространения наиболее подходящими оказываются электромагнитные волны СВЧ и оптического диапазонов, а с точки зрения фазовых измерений — волны, соответствующие значительно более низким частотам.
Для разрешения этого противоречия в фазовых дальномерах и используют модуляцию излучаемых колебаний. Передатчик излучает колебания СВЧ или оптического диапазона, которые служат несущими. Они модулируются колебаниями частот 10 — 500 МГц, к которым относятся фазовые измерения и которые, следовательно, являются измерительными, масштабными.
Итак, передатчик излучает модулированные колебания. Поскольку несущая частота нужна лишь как переносчик масштабной частоты, после приема модулированных колебаний от несущей в общем случае необходимо избавиться, т. е. выделить из принятого модулированного сигнала только колебания масштабной частоты — частоты модуляции. Для этого нужно применить операцию детектирования. Фазометр измеряет разность фаз излучаемых и принимаемых колебаний. В результате сравнения фаз опорного и получаемого сигнала определяется только величина сдвига фазы, а целое число циклов остается неизвестным и не позволяет сразу получить расстояние. Эта неоднозначность разрешается путем многократных измерений модуляции волны, в результате чего определяется уникальное целое число циклов. Как только целое число циклов определено, то расстояние до цели может быть вычислено очень точно. В соответствии с вышеизложенным обобщенная структурная схема фазового лазерного дальномера показана на рисунке 3.4.
Фазовый метод традиционно несколько более точен, чем импульсный. Однако, для многих практических задач это отличие несущественно, зато возможность измерений больших расстояний с помощью импульсного дальномера очень востребована многими пользователями. Поэтому для решения многих практических задач аэросъемки применяют импульсные лазерные дальномеры.
Чем больше расстояние от излучателя, тем больше размер лазерного пятна. Этот принцип действует и для импульсного, и для фазового методов, хотя размер и форма пятна на цели (отклонение пучка от точки визирования) отличаются. Этот эффект различного расхождения имеет как свои преимущества, так и недостатки.
Импульсный и фазовый методы отличаются также своей чувствительностью к прерыванию сигнала во время измерений. Так как импульсный метод объединяет непосредственное измерение времени прохождения импульса с технологией обработки сигналов, то он оказывается менее чувствительным к прерыванию сигнала, чем фазовый метод. При измерении фазовым методом прерывание сигнала приводит к необходимости повторного определения неоднозначности, но, в конечном счете, также выявляется и исключается из измерений.
Рис. 3.4 — Структурная схема фазового дальномера: 1- передающая часть; 2- источник излучения; 3- модулятор оптического излучения; 4 — передающая оптическая система; 5-вспомогательный генератор; 6- смесители I и II; 7-генератор масштабной частоты; 8- линия оптического короткого замыкания; 9- объект; 10 — фотоэлектронный приемник; 11 — приемная оптическая система; 12 и 13- опорный и информационный сигналы; 14 -фазоизмерительное устройство.
В современных системах дальнометрирования передающая и приемная оптические системы, как правило, совмещены, что позволяет сделать конструкцию прибора более компактной и устранить трудности в приеме отраженного сигнала, а в качестве приемника используются фотодиоды на основе кремния и германия.
Одновременно с наземными лазерными сканерами в 80-х годах были разработаны лазерные сканеры воздушного базирования, которые предназначены для воздушных съемок и устанавливаются на летательный аппарат. Обобщенная структурная схема лазерного сканера приведена на рисунке 3.5 [5].
Данные сканеры могут работать как в активном так и в пассивном режимах. Активный режим применяется при съемке малоконтрастных объектов, и их подсветка осуществляется излучением зондирующего лазера.
При работе в активном режиме лазерные сканеры осуществляют сканирование местности вдоль маршрута. Построчное сканирование пучком лазерного излучения осуществляют перпендикулярно маршруту со скоростью несколько тысяч точек в секунду.
При работе в пассивном режиме регистрация собственного или отраженного от объекта солнечного излучения осуществляется приемным оптико-электронным устройством на основе цифрового аэрофотоаппарата, тепловизионной или телевизионной аппаратуры. Видеоконтрольное устройство позволяет контролировать результаты съемки на борту летательного аппарата в реальном масштабе времени.
Обзор пространства в системах со сканированием узким полем осуществляется посредством вращения или качания зеркал, призм или объективов, а также движения диафрагм и щелей. При этом происходит перемещение поля зрения в пределах заданного поля обзора по определенному закону так, что след оптической оси прибора описывает в пространстве предметов круг, циклоиду или другую фигуру. После просмотра всех точек поля обзора движение повторяется.
Системы сканирования узким полем позволяют получить большую площадь обзора при достаточно малом мгновенном угле поля зрения, что увеличивает чувствительность прибора к излучению малоразмерных удаленных источников излучения, уменьшая влияние фона. Однако при заданном времени обзора в результате сканирования узким полем получаются короткие импульсы фототока, для усиления которых необходимо широкополосное усиление.
Обычно осмотр поля обзора осуществляется по заранее заданному закону и неизменной программе, однако в принципе возможно построение систем, в которых с большей подробностью осматриваются те области поля обзора, где вероятность появления объекта велика, и с меньшей подробностью — те, где вероятность мала. Если появление объекта в той или иной точке поля обзора равновероятно, задача выбора оптимального закона сканирования значительно усложняется.
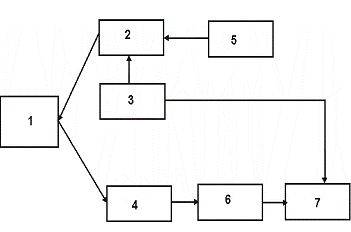
Рис. 3.5 — Обобщенная структурная схема лазерного сканера: 1 — объект; 2 — сканирующее устройство; 3 -устройство синхронизации; 4 — приемное оптико-электронное устройство; 5 — зондирующий лазер; 6 — блок обработки и усиления сигналов; 7 — видеоконтрольное устройство
Сканирование большого пространства узким полем встречает серьезные препятствия, так как скорости сканирования ограничены инерционностью приемника, чувствительностью прибора и возможностями быстрого перемещения элементов оптической системы, осуществляющих сканирование.
В связи с этим приходится расширять мгновенное поле зрения системы, определяющее ширину сканирующего поля. Однако возникают две трудности: во-первых, размеры поля зрения начинают превышать допустимые ошибки измерения угловых координат объекта и точный отсчет их текущих значений, например, по положению центра поля зрения прибора, становится невозможным; во-вторых, помехоустойчивость оптико-электронного прибора уменьшается, так как большее поле зрения улавливает соответственно большее излучение фона.
Указанные трудности удается в некоторой степени преодолевать, подвергая анализу изображение, создаваемое оптической системой прибора, с помощью специальных растров, называемых в разных случаях анализаторами, координаторами и модуляторами. Растр размещается в картинной плоскости оптической системы и перемещается относительно изображения поля излучения, поэтому на приемник, находящийся за растром, падает модулированное излучение, причем модуляция осуществляется так, что параметры модулированного сигнала (амплитуда, частота, фаза, длительность импульса и т. д.) зависят от положения и размеров источника излучения.
Таким образом, движущийся растр позволяет решить три основные задачи: преобразует пространственное распределение излучения в функцию времени (модуляция); выделяет излучение объекта наблюдения (цели) из излучения фона (селекция); вносит в сигнал от цели определенным образом закодированную информацию о положении цели в поле зрения, т. е. определяет координаты цели в системе координат оптической системы (измерение).
Поскольку функции растров не ограничиваются модуляцией потока излучения, термин «модулятор» к ним, строго говоря, неприменим. В течение длительного времени их называли координаторами, однако в последние годы этот термин практически отождествляется с понятием головки самонаведения. В связи с этим в дальнейшем изложении будет использоваться термин растровый анализатор или растр.
Сигнал, вырабатываемый приемником излучения, установленным за растровым анализатором, после соответствующей обработки и усиления может быть, в частности, использован для воздействия на привод различных элементов, обеспечивающих сканирование, т. е. зеркал, линз, клиньев, либо подвижной платформы, на которой установлен прибор, с целью автоматического сопровождения объекта наблюдения при его движении в пределах поля обзора [3].
Как показано в [14-21,3], лазерные сканеры по сравнению с другими аэросъемочными системами имеют следующие преимущества:
Высокие геодезическая точность и производительность.
Высокая степень автоматизации обработки результатов съемки (при использовании ПО ALTEXIS).
Возможность оперативной установки оборудования на борт летательного аппарата.
Короткий по сравнению с другими аэросъемочными технологиями технологический цикл (от начала оборудования летательного аппарата до выдачи конечных результатов).
Практически полное отсутствие наземных геодезических работ.
Возможность работы в темное время суток и в любое время года.
Возможность комплексирования с аэрофотоаппаратом, спектрозональным и тепловизионным сканерами.
Возможность использования легких и средних летательных аппаратов (аппаратура может устанавливаться как на внешней подвеске, так и, при наличии люка соответствующего размера, внутри фюзеляжа).
Наличие согласованных схем установки на ряде отечественных летательных аппаратах.
Возможность контроля оператором получаемых данных и оперативного изменения им режимов и параметров съемки (во время полета).
Чрезвычайно широкий спектр приложений.
Высокая экономическая эффективность.
Сниженное энергопотребление.
Модульная конструкция для облегчения и ускорения обслуживания
2 Преимущества воздушного лазерного сканирования
Лазерное сканирование представляет собой новую технологию, обладающую множеством преимуществ перед другими методами измерений, таких как значительное сокращение сроков выполнения полевых работ, высокое качество и детальность съемки. Главным преимуществом использования лазерного сканирования является то, что конечный продукт представляет собой трёхмерную модель, которая в свою очередь является более технологичной, чем двумерная. В трехмерной модели инженерные задачи можно решать с большей эффективностью, так как видна реальная ситуация местности, а не отдельные точки как в случае с тахеометрической съёмкой [12].
Преимущества воздушного лазерного сканирования:
- получение трехмерных моделей рельефа и всех наземных объектов;
- детальность изображения трехмерных сцен путем выбора соответствующих режимов полета и съемки (высоты и скорости полета, а также ширины полосы захвата);
- исключение из технологического цикла наземных геодезических работ, мобильность аэросъемочного комплекса и средств наземной постобработки;
- истинный рельеф (поверхность земли) без существенной потери точности при наличии травяного покрова крон деревьев;
- результаты топографических съемок в безориентирной местности (полностью заснеженные территории, тундра, пустыни, песчаные пляжи).
К основным достоинствам лазерной технологии, несомненно, можно отнести высокую скорость и оперативность съемки, недостижимую любыми другими методами измерений. В области обследования линий электропередач воздушная лазерная съемка сегодня является практически мировым стандартом. При этом нельзя забывать о правовых вопросах. Например, для проведения любой аэросъемки требуется пройти долгий путь получения соответствующих разрешений, связанных как с вопросами секретности, так и с вопросами использования воздушного пространства. Это может занимать весьма значительное время, что отрицательно влияет на оперативность. Основным результатом лазерного сканирования — будь то наземное, воздушное или мобильное — является облако трехмерных точек, с той или иной точностью описывающих геометрические параметры объекта съемки. Количество лазерных отражений, полученных при съемке объекта обследования, часто составляет сотни миллионов и даже миллиарды. Обработка таких массивов данных и формирование на их основе конечных продуктов для пользователей в различных отраслях деятельности сегодня является наиболее трудоемкой составляющей лазерной технологии [26].
ЗАКЛЮЧЕНИЕ
При написании выпускной квалификационной работы были решены следующие поставленные задачи:
- раскрыто содержание геодезического обеспечения при проведении кадастровых работ;
- рассмотрены основные способы получения топографических материалов, используемых в кадастре: наземные съёмки и дистанционное зондирование Земли;
- проведён анализ принципов построения, функционирования и основных характеристик воздушных лазерных средств;
- приведены основные преимущества и недостатки воздушных лазерных систем.
При раскрытии содержание геодезического обеспечения проведения кадастровых работ были рассмотрены его основные задачи и вопросы, касающиеся проведения межевания земель. Установлено, что точность определения границ земельных участков и располагающихся на них объектов недвижимости для застроенных территорий не должна быть меньше 0,20 метров.
Основные методы определения координат характерных точек земельных участков и объектов капитального строительства при проведении кадастровых работ: геодезический, метод спутниковых определений, картометрический, фотограмметрический, аналитический.
Были установлены и рассмотрены основные способы получения топографических материалов, используемых в кадастре:
- теодолитная съёмка;
- фототеодолитная съёмка;
- тахеометрическая съёмка;
- космическая и аэрофотосъёмка;
- наземное и воздушное лазерное сканирование.
Был проведён анализ принципов построения, функционирования и основных характеристик воздушных лазерных систем, их основные преимущества и недостатки. Были рассмотрены и приведены основные характеристики двух воздушных лазерных систем: аэросъемочная система лазерного картографирования ALTM 3100 и воздушный лазерный сканер RIEGL LMS-Q680.
Использование технологии лазерного сканирования позволяет предложить конечному пользователю самые разные продукты, которые могут быть использованы при создании геоинформационных систем, проектировании, обследовании и анализе состояния различных объектов, контроле инженерных работ, проведении регрессионного анализа и т.д.
Основными практическими достоинствами использования технологии лазерного сканирования по сравнению с традиционными наземными методами топографической съемки являются: высокая производительность (выпуск топографических планов масштаба 1: 2000 осуществляется в течение 1- 2 суток); возможность выполнения работ в труднодоступных и недоступных для наземной съемки районах (заснеженные территории, густой растительный покров, пустыни); гибкость метода привязки в различные системы координат; отсутствие необходимости выполнения наземных геодезических работ по планово-высотному обоснованию; использование различных лазернолокационных данных при дешифрировании для полного отображения качественных и количественных характеристик объектов; существенное снижение финансовых затрат.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
[Электронный ресурс]//URL: https://inzhpro.ru/referat/printsip-deystviya-vozdushnyih-lazernyih-skanerov/
«О единых государственных системах координат»: Постановление Правительства Российской Федерации от 28 декабря 2012 г. N 1463 г. //Российская газета. — 2013. — 8января.
Данилин, И. М. Мониторинг земель и землепользованиия на основе воздушной лазерной локации и цифровой аэро и космической съемки. / И. М. Данилин, Е. М. Медведев // Научно — практический ежемесячный журнал «Землеустройство, кадастр и мониторинг земель».- 2008.- № 5. -С. 92 — 95.
Дементьев, В. Е. Современная геодезическая техника и ее применение: Учебное пособие для вузов. / В. Е. Дементьев. — М.: Академический Проект, 2008. — 591 с.
Дементьев В. Е. Современная геодезическая техника и ее применение: Учебное пособие для вузов / В. Е. Дементьев. — М.: Академический Проект, 2008. — 591 с.
Дементьев, В. Е. Современная геодезическая техника и ее применение: Учебное пособие для вузов. / В. Е. Дементьев. — М.: Академический Проект, 2008. — 591 с.
Золотова, Е. В. Геодезия с основами кадастра / Е. В. Золотова, Р. Н. Скогорева.- М.: Академический Проект, 2011.
Золотова, Е. В. Градостроительный кадастр с основами геодезии / Е. В. Золотова, Р. Н. Скогорева.- М.: Архитектура-С, 2008.
Инструкция по топографической съемке в масштабах 1:5000, 1:2000, 1:1000 и 1:500 / Главное управление геодезии и картографии при Совете Министров СССР. — М.: Недра, 1982. — 151 с.
Киселёв, М. И. Геодезия: учеб.для сред. проф. образования / М. И. Киселёв, Д. Ш. Михелев. — М.: Издательский центр «Академия», 2004. — 384 с.
Колесникова, Н. В. Лазерное сканирование наземного базирования / Н. В. Колесникова // Пространственные данные в информационных, кадастровых и геоинформационных системах. — 2006. — №4. — С. 57-71.
Куштин, И. Ф. Геодезия: учебно-практическое пособие. — М.: «Издательство Приор», 2001. — 448 с.
Лазерное сканирование в геодезии — Режим доступа: <#»898351.files/image013.gif»>
- Рис. А.1 — Воздушный лазерный сканер ALTM 3100
ПРИЛОЖЕНИЕ Б
(справочное)
Воздушный лазерный сканер RIEGL LMS-Q680

Рис. Б.1 — Воздушный лазерный сканер RIEGL LMS-Q680