
Сегодня уже трудно представить себе город без работающего вертикального транспорта. Для огромного количества людей нормальная работа лифтового хозяйства является синонимом нормальной жизни. Качественная работа лифтов и подъемных механизмов и их надежность остается одним из ключевых аспектов в деле обеспечения безопасности жилых и общественных зданий, поэтому необходимо непрерывное развитие и модернизация лифтового оборудования.
Лифт – механизм вертикального транспорта, предназначенный для транспортировки пассажиров и грузов в жилых и производственных помещениях. Широкое распространение использования лифтового электропривода в промышленности и в повседневной жизни, определяет лифт как наиболее распространенный вид вертикального транспорта.
Наблюдаемая в последнее время тенденция к повышению этажности зданий в городах, а также к комфорту передвижения в лифтах ведёт к усложнению систем управления процессом передвижения. Благодаря развитию современных микропроцессорных систем управления данные задачи успешно решаются в настоящее время.
Современный лифт – это сложное электромеханическое устройство, работающее в полуавтоматическом режиме по установленной программе. Программа работы лифта определяется действиями пассажиров, местонахождением и положением (свободна или занята) кабины и регламентируется при помощи системы управления лифтом.
Система управления лифтом должна решать задачи безопасного и комфортного передвижения пассажиров [ 1 ]. Передвижение должно осуществятся с допустимым ускорением, требуемой скоростью и отсутствие ощутимых рывков. Для выполнения приведённых требований необходимо получать информацию о положении и скорости движения кабины с помощью различных датчиков.
Большое внимание необходимо уделить вопросу безопасности передвижения. Также следует обратить внимание на использование системы управления не только для модернизации существующего лифтового оборудования, но и использование в новом строительстве.
1. Актуальность темы
Система управления лифтом должна решать задачи безопасного и комфортного передвижения пассажиров. Передвижение должно осуществятся с допустимым ускорением, требуемой скоростью и отсутствие ощутимых рывков. Для выполнения приведённых требований необходимо получать информацию о положении и скорости движения кабины с помощью различных датчиков и смоделировать систему контроля.
Электропривод пассажирского лифта
... лифта и принцип работы 1.1 Классификация лифтов По назначению можно выделить следующие типы лифтов: а) пассажирский - предназначен для подъема и спуска людей; б) грузопассажирский - предназначен для транспортировки пассажиров ... лифтов и в тех случаях, когда необходимо снизить ... лифтового оборудования и существенно снижает уровень структурного шума в несущих конструкциях здания. К недостаткам схем лифта ...
Также следует обратить внимание на использование системы управления не только для модернизации существующего лифтового оборудования, но и использование в новом строительстве. Поэтому тема магистерской работы является актуальной.
2. Цель и задачи исследования
Целью данной работы является улучшение динамических характеристик системы управления лифтом в переходных режимах работы.
Для достижения поставленной цели не обходимо сформулировать основные задачи работы:
- Разработать математическую модель системы управления лифтом на базе ПИД регулятора.
- Синтезировать имитационную модель данной системы.
- Исследовать динамические характеристики системы управления при помощи математической модели.
Измерение текущего значения скорости производится при помощи устройства контроля скорости УКС-01 [ 2 ]. Обработка данных и выдача сигналов управления на двигатель будет производиться при помощи программируемого логического контроллера (ПЛК).
При помощи герконовых датчиков, находящихся на каждом этаже и поверхности кабины, будут контролироваться процессы разгона-торможения лифта [ 3 ]. Также будут установлены следующие измерительные датчики и приборы:
- прибор контроля открытия-закрытия дверей БАРЬЕР-1М [ 4 ];
- датчик температуры;
- датчик момента;
- модуль логики для контроля загруженности кабины КПЛ 1.1.
Для устранения аварийной ситуации при превышении максимального уровня загрузки кабины на диспетчерскую панель, а с нее на лифтовой индикатор поступает сигнал о перегрузки. При превышении безопасной скорости кабины поступает сигнал на ПЛК, а при его помощи осуществляется аварийная остановка лифта.
3. Технологическая схема объекта
Описание технологического процесса и оборудования
Основными частями лифта являются: лебёдка, кабина, противовес, направляющие для кабины и противовеса, двери шахты, ограничитель скорости, тяговые канаты и канат ограничителя скорости, узлы и детали приямка, электрооборудование и электроразводка. Основные параметры технической характеристики лифта: номинальная грузоподъёмность m = 400 кг, масса противовеса m пр = 1000 кг, масса пустой кабины m0 = 800 кг., номинальная скорость U = 1 м/c. Лифт двенадцатиэтажного дома плюс этаж технического обслуживания. Расстояние между этажами 3 м. Расчетная работа электропривода пуск раз в 3 минуты, 20 раз за час.
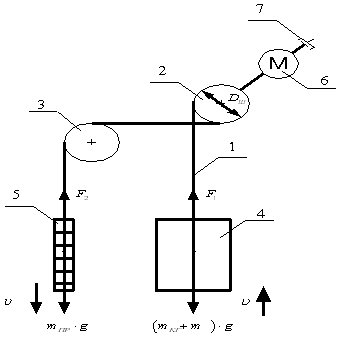
Рисунок 1 – Схема лифта
Кинематическая схема лифта представлена на рис. 1.1. Лифт имеет полиспастную подвеску с кратностью полиспаста 2, при которой тяговые канаты 1, сходящие с канатоведущего шкива 2, огибает полиспастный блок 3 на кабине 4 и противовесе 5 и крепятся к верхнему перекрытию шахты в машинном помещении.
Перемещение кабины и противовеса по направляющим осуществляется лебёдкой 6, установленной в машинном помещении, с помощью тяговых канатов 1. Там же размещены ограничители скорости, контроллер, вводное устройство. Лифт комплектуется специализированным контроллером.
Электрический привод лифта
... двигателя при нормальной работе и в аварийных режимах. Описание режима и цикла работы электродвигателя привода лифта Электропривод лифта должен обеспечивать реверсивную работу двигателя, плавный пуск ... для грузовых лифтов являются: канаты, противовес, кабина, подъемная лебедка, двигатель, тормоз и аппаратура управления. На рисунке показан общий вид кинематической схемы лифта. В шахте, которая ...
При нажатии кнопки вызывного аппарата в электроаппаратуру управления лифтом подается электрический импульс (вызов).
Если кабина находится на остановке, с которой поступил вызов, открываются двери кабины и шахты на данной остановке. Если кабина в другом месте, подается команда на её движение. В обмотку электродвигателя лебёдки и катушки электромагнитных тормозов подаётся напряжение, тормоза отпускают, и ротор электродвигателя приходит в движение.
При подходе кабины к требуемой посадочной площадке система управления лифтом по сигналу датчиков точной остановки переключает электродвигатель лебёдки на работу с пониженной частотой вращения ротора. Скорость движения кабины снижается, подаётся команда на остановку, и в момент, когда порог кабины совмещается с уровнем порога двери шахты, кабина останавливается, вступает в действие тормоз, включается в работу привод дверей, и двери кабины и шахты открываются. На лифте с системой управления от контроллера происходит бесступенчатое регулирование частоты вращения ротора двигателя посредством системы частотного регулирования, что обеспечивает плавные остановку и пуск кабины.
При нажатии кнопки приказа на панели управления, расположенной в кабине, закрываются двери кабины и шахты, кабина отправляется на посадочную площадку, кнопка приказа которой нажата.
После прибытия на требуемую посадочную площадку и выхода пассажиров двери закрываются, кабина стоит до тех пор, пока не будет нажата кнопка любого вызывного аппарата.
Движение кабины возможно только при исправности всех блокировочных и предохранительных устройств. Срабатывание любого предохранительного устройства приводит к размыканию цепи управления и остановке кабины.
Основу конструкции лифта составляет механизм подъёма на основе применения лебёдки с канатной системой передачи движения кабине.
Пассажиры перемещаются в специально-оборудованной кабине с закрываемыми дверями, которые имеют блокировочные устройства, исключающими возможность движения при открытых створках.
Для центрирования кабины и противовеса в горизонтальной плоскости и исключения поперечного раскачивания во время движения, применяются направляющие, устанавливаемые на всю высоту шахты лифта.
Направляющие обеспечивают возможность торможения кабины (противовеса) ловителями при аварийном превышении скорости и удерживают её до момента снятия с ловителей.
Пространство, в котором перемещается кабина и противовес ограждается на полную высоту и называется шахтой.
Помещение, в котором устанавливается подъёмная лебёдка и другое необходимое оборудование, называется машинным помещением.
Часть шахты, расположенная ниже уровня нижней посадочной площадки, образует приямок, в котором размещаются упоры или буферы, ограничивающие ход кабины (противовеса) вниз и останавливающие с допустимым ускорением замедления.
Для предотвращения аварийного падения кабины (противовеса) лифт оборудуется автоматической системой включения ловителей от ограничителя скорости, срабатывающей при аварийном превышении скорости.
Конструктивные требования к устройству мусоропроводов и лифтов
... кабины и дверей шахты. Лифтовой "тюнинг" подразумевает не только эстетическое улучшение дизайна, но и модернизацию управления. Фирмы-производители предлагают большой выбор специальных режимов работы и дополнительных опций. Система управления лифтом, ... при подъеме на высоту до 15 м, где умеренная скорость движения кабины приемлема, кабина соединена с верхней частью поршня, который движется вверх-вниз ...
Ловители устанавливаются по боковым сторонам каркаса кабины (противовеса) и приводятся в действие канатом, охватывающим шкив ограничителя скорости.
В приямке устанавливается натяжное устройство ограничителя скорости.
Станция управления работой лифта, приборы и аппараты находятся в машинном помещении.
Соединение электрического оборудования кабины со станцией управления обеспечивается посредством подвесного кабеля и жгута проводов, смонтированного в шахте.
Датчики замедления, шунты датчика точной остановки и устройства контроля шахтных дверей также устанавливаются в шахте.
На рис. 1.1 представлена схема размещения оборудования лифта. Лебёдка и шкаф управления располагаются в лифтовом помещении, закрытом от проникновения посторонних лиц.
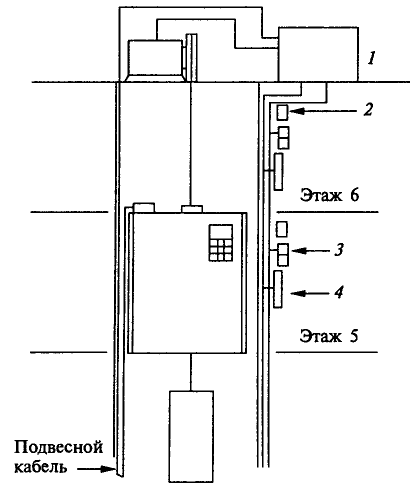
Рисунок 1.1 – Технологическая схема оборудования
Основная плата управления установлена в шкафу контроллера. Последовательная линия передачи данных подразделяется на каналы кабины и шахты. Канал кабины, к которому подключена клеммная коробка кабины, представляет собой подвесной кабель. На рис. 1.1 приняты следующие обозначения: 1 – шкаф контроллера, 2 – позиционный индикатор, 3 – этажные кнопки, 4 – датчик положения кабины.
4. Моделирование узла
Получение математической модели асинхронного двигателя, лежащего в основе работы лифта, является основой общей модели объекта. По известным паспортным данным двигателя серии 4 А [ 5 ] мощности 5,5 кВт произведем следующие необходимые расчеты:
Номинальный фазный ток статора:
Базисное значение сопротивления:
![]() Ом
Ом
Угловая частота тока:
![]()
Реактивное сопротивление рассеяния статора в относительных единицах:

Коэффициент, связывающий параметры машины в Т и Г-образной схемах замещения [ 6 ]:
Реактивное сопротивление рассеяния фазы статора:

Активное сопротивление фазы статора:

Индуктивность рассеяния фазы статора:

Реактивное сопротивление рассеяния фазы ротора:

Активное сопротивление фазы ротора:

Индуктивность рассеяния фазы ротора:

Реактивное сопротивление взаимоиндукции:

Индуктивность взаимоиндукции:

Управление в строительстве
... рассматриваются понятие, этапы и особенности проектного управления в строительстве. Кроме того анализируются модели зрелости проектного управления и проводится выбор одной для дальнейшего исследования в работе. Во второй главе дается общая ...
Имитационная модель лифта с контролем по скорости представлена на рисунке 2:
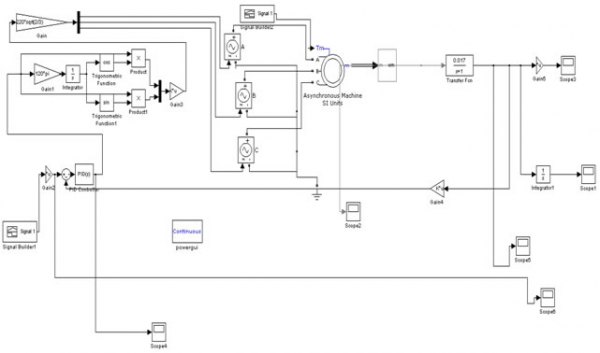
Рисунок 2 – Имитационная модель лифта с контролем по скорости
Для поддержания скорости на нужном уровне выберем ПИД регулятор – наиболее эффективный и распространенный вид регулятора, обеспечивающий достаточно высокую точность при управлении различными процессами [ 7 ]. Известно, что данный регулятор следует выбирать для систем регулирования, с относительно малым уровнем шумов и величиной запаздывания в объекте управления.
Для синтеза регулятора применим метод Зиглера-Никольса [ 8 ].
- Выставляем все коэффициенты (Kp, Ki, Kd) в 0.
- Начинаем постепенно увеличивать значение Kp и следим за реакцией системы. Нам нужно добиться, чтобы в системе начались устойчивые колебания (вызванные перерегулированием).
Увеличиваем Kp, пока колебания системы не стабилизируются (перестанут затухать).
Запоминаем текущее значение Kp (обозначим его Ku) и замеряем период колебаний системы (Tu).
По результатам Kp=52, Tu=0.9.
- Теперь используем полученные значения Ku и Tu для расчета всех параметров ПИД регулятора по формулам:
Kp = 0.6 * Ku; Kp = 31,2
Ki = 2 * Kp / Tu; Ki = 69,3
Kd = Kp * Tu / 8; Kd = 3,51
Данные настройки подставим в ПИД регулятор и промоделируем систему и оценим полученные результаты [ 9 ].
Рассмотрим следующий вариант движений-остановок лифта: лифт стоит на 3-ем этаже, в него заходит 1 человек, этаж назначения – 5.
Результаты моделирования представлены ниже на анимации 1:
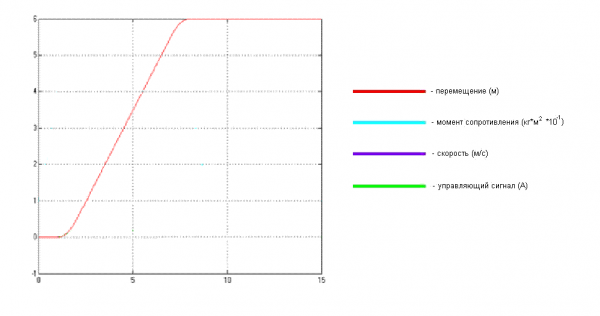
Анимация 1 – Графики управляющего тока, линейной скорости перемещения лифта, момента сопротивления, перемещения кабины
Выводы
Была спроектирована САУ процесса управления перемещения кабины лифта. Был рассмотрен процесс работы объекта, его технологическая схема, а также цель проектирования САУ. Были определены задачи, необходимые системе для достижения поставленной цели.
Были получены и проанализированы переходные процессы данных моделей. Момент сопротивления и управляющий токовый сигнал , при различных условиях меняется, однако по графикам видно , что заданное воздействие отрабатывается и на выходе мы получаем требуемую скорость с минимальными отклонениями от заданных на входе значений.
В дальнейшем в систему будут внесены нелинейности [ 10 ];и будет выяснен наилучший способ их отработки для достижения поставленной цели.
Список источников
[Электронный ресурс]//URL: https://inzhpro.ru/referat/po-avtomatike-na-temu-lift/
- П. Д. Гаврилов, Л. Я. Гимельштейн, А. Е. Медведев Автоматизация производственных процессов – М.: Недра, 1985. – 216с.
- Сайт компании
OTIS
http://www.otis.com . - Под общ. ред. И. П. Копылова и Б. К. Клонова Справочник по электрическим машинам: В 2т./С74. Т.1.–М.: Энергоатомиздат, 1988. 456 с.
- Электронный каталог лифтового оборудования. http://лифтов.рф/liftovoe-oborudovanie-katalog .
- А. Э. Кравчик, М. М. Шлав, В. И. Афонин, Е. А. Соболенская Асинхронные двигатели серии 4А: Справочник/А90 – М.: Энергоиздат, 1982. 504 с.
- В. Е. Китаев, Л. С. Шляпинтох Электротехника с основами промышленной электроники. Учебное пособие для проф.-техн. учебных заведений. Изд. 2-е, переработ. и доп. М.,
Высш. школа
, 1968. 416 c. - С. Г. Герман – Галкин, Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие – СПб.: Корона принт, 2001. 320 с.
- Ю. Лазарев Моделирование процессов и систем в MATLAB. Учебный курс. – СПб.: Питер; Киев: Издательская группа BHV, 2005. 512 с.
- П. В. Агуров Интерфейсы USB. Практика использования и программирования Спб.: БХВ Петербург, 2004.
- Б. Ван дер Поль. Нелинейная теория электрических колебаний. Пер. с англ. Связьтехиздат, 1935.