
В России создана мощная энергетическая база, обеспечивающая ускоренное развитие всех отраслей народного хозяйства и широкое внедрение различных электрических приборов для бытовых нужд городского и сельского хозяйства.
2. Общие сведения о генераторах и системах возбуждения генераторов.
электромеханические индукционные генераторы переменного тока
Возникновение и развитие объединенных энергосистем
... СССР - ОЭС Юга). 3. Возникновение и развитие энергосистем в СССР Процесс объединения электростанций на параллельную работу и образования первых энергетических систем начался в СССР в 20- ... основы АСДУ. Впервые были разработаны методы, алгоритмы и программы оптимизации энергетических режимов, расчетов электрических режимов сложных электрических сетей, анализа устойчивости, настройки противоаварийной ...
электромагнит
Современный генератор электрического тока — это внушительное сооружение из медных проводов, изоляционных материалов и стальных конструкций. При размерах в несколько метров важнейшие детали генераторов изготовляются с точностью до миллиметра. Нигде в природе нет такого сочетания движущихся частей, которые могли бы порождать электрическую энергию столь же непрерывно и экономично.
Как было уже выше сказано синхронная машина состоит из статора, ротора и системы возбуждения, система возбуждения является составной частью синхронной машины. Система возбуждения представляет собой комплекс устройств, предназначенных для питания обмотки ротора синхронной машины током возбуждения.
Процессы, происходящие в синхронной машине при ее возбуждении, описываются уравнениями Парка-Горева. Они достаточно сложны, имеют нелинейный характер. Отметим только, что возбуждение синхронной машины определяющим образом влияет на такие ее параметры, как напряжение статора (при работе машины на холостом ходу), генерируемая или потребляемая реактивная мощность (при работе синхронной машины в сети в режимах, соответственно, перевозбуждения или недовозбуждения).
Скорость изменения тока возбуждения синхронной машины, а также закон регулирования возбуждения являются одними из важнейших параметров обеспечения динамической и статической устойчивости энергосистемы.
2.1 Виды систем.
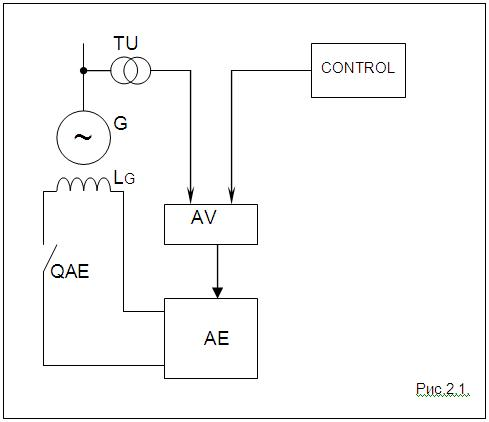
Общая структурная схема системы возбуждения синхронного генератора приведена на рис.2.1. На рисунке:
G – синхронный генератор (статор),
LG – обмотка возбуждения генератора.
Система возбуждения состоит из возбудителя AE и автоматического регулятора возбуждения AV.
Возбудитель AE представляет собой силовой агрегат, основным назначением которого является генерация (или преобразование) тока для возбуждения генератора, и способность его регулирования.
В зависимости от типа системы возбуждения, возбудитель AE может получать энергию, необходимую для питания обмотки ротора, в виде механической энергии вращения (электромашинные системы возбуждения), в виде электрической энергии (статические системы возбуждения), либо в виде комбинации названных способов.
Автоматический регулятор возбуждения AV предназначен для поддержания напряжения статора генератора G в соответствии с заданной уставкой. Обратная связь со статором обеспечивается посредством трансформатора напряжения TU, уставка по напряжению задается со щита управления генератором (на рис. – функция управления «Control»).
В зависимости от отклонения напряжения статора от уставки, регулятор воздействует на возбудитель с тем, чтобы соответственно изменить ток возбуждения синхронного генератора.
Показанная на рис.2.1 структура в достаточной мере условна. Современные системы возбуждения, например, имеют комплектное изготовление. В комплект системы входит все оборудование, необходимое для возбуждения синхронного генератора, включая автомат гашения поля QAE, контактор и резистор самосинхронизации, а также защитный разрядник, подключаемые параллельно ротору (на рис.3.1 не показаны), аппаратура управления, защит и сигнализации системы, трансформатор собственных нужд, коммутационная аппаратура для подключения к ротору турбогенератора резервного возбудителя станции. В наиболее поздних разработках отсутствует аппаратное различие таких функциональных частей, как регулятор возбуждения, система управления возбудителем, схема автоматики системы возбуждения, поскольку все названные функции выполняются программируемым контроллером.
Генератор переменного тока (2)
... а обмотка возбуждения - на статоре. Особый класс составляют синхронные генераторы с увеличенным числом пар полюсов - для получения тока повышенной частоты (генераторы повышенной частоты). 4. Принцип действия генератора трехфазного тока Трехфазная система переменного тока ...
Высокочастотные и бесщеточные системы возбуждения.
В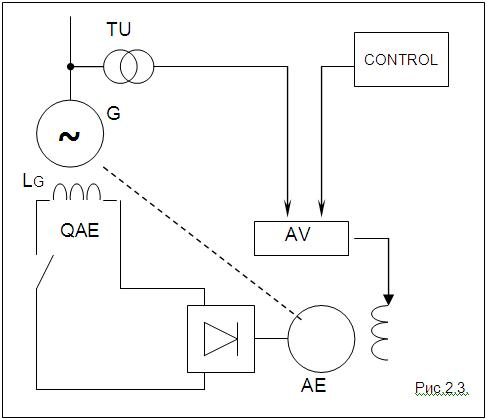 ысокочастотные системы возбуждения явились дальнейшей эволюцией электромашинных систем.
ысокочастотные системы возбуждения явились дальнейшей эволюцией электромашинных систем.
В основе высокочастотных систем – также электрическая машина, но не постоянного тока, а переменного. Тем самым конструкторы ушли от проблемы коллекторного аппарата. Более того, электрическая машина (генератор-индуктор) имеет специальную конструкцию. Она также расположена на одном валу с турбиной и турбогенератором, но ее ротор представляет собой магнитопровод с переменным зазором (по форме напоминающим зубчатое колесо).
Обмотки возбуждения и основная обмотка расположены на статоре. Таким образом оказалась также решена проблема щеточного аппарата.
При вращении ротора и поданном возбуждении в магнитопроводе за счет переменного зазора индуцируется переменное магнитное поле. Частота изменения поля – 450 или 500 Hz (ротор имеет 9 или 10 зубцов).
В основных обмотках наводится ЭДС с частотой изменения поля. Основных обмоток – 16, симметрично распределенных по статору под углом 22,5 градуса и соединенных в звезду. Таким образом, индуктор – 16-фазная электрическая машина. На выходе основных обмоток расположен диодный мост (неуправляемый выпрямитель).
Ротор синхронного генератора питается выпрямленным напряжением высокочастотного возбудителя. В возбудителях небольшой мощности (для турбогенераторов до 200MW) диодный мост конструктивно расположен в корпусе возбудителя, в системах большей мощности мост представляет собой отдельную монтажную единицу.
Структурная схема высокочастотной системы возбуждения приведена на рис.2.3.
Конструкция возбудителя обеспечила относительно высокое быстродействие системы возбуждения. Помимо высокой частоты выпрямления, на повышение быстродействия влияет особая конструкция системы возбуждения возбудителя. В индукторе применяются 2 обмотки возбуждения, включенные встречно. При протекании тока по одной из них напряжение на выходе индуктора повышается, при подаче тока на вторую – снижается. Питание обмотки возбуждения получают от подвозбудителя – это уже третья электрическая машина, установленная на одном валу с турбиной. (на рис.3.3 не показана).
Подвозбудитель по конструкции аналогичен возбудителю, но его ротор представляет собой набор постоянных магнитов. Подвозбудитель питает обмотки возбуждения индуктора через автоматический регулятор возбуждения, в котором размещен трансформатор, выпрямители и магнитные усилители, изменяющие ток прямовключенной и обратновключенной обмоток возбуждения индуктора.
Автоматическое регулирование возбуждения синхронных генераторов ...
... основных модификаций систем возбуждения и автоматического регулирования возбуждения. Автоматическое регулирование осуществляется по отклонению напряжения статора генератора. Основное возбуждение возбудителя создается током самовозбуждения Iо,св в обмотке ОСВ, равным току ротора турбогенератора Iо,св = Iо,р. Управление возбуждением осуществляется двумя токами Iо,рег,1 ...
Таким образом, регулирование возбуждения турбогенератора производится, как и в электромашинных системах, изменением тока возбуждения возбудителя.
Бесщеточные системы возбуждения по структуре аналогичны высокочастотным, с той лишь разницей, что основные обмотки возбудителя и диодный мост конструктивно размещены в роторе возбудителя, то есть вращаются вместе с ротором турбогенератора. Тем самым представилась возможность исключить из схемы системы возбуждения последнее ненадежное звено – кольца ротора и щеточный аппарат, через который во всех остальных системах подается ток на вращающуюся обмотку ротора турбогенератора.
В СССР были выполнены уникальные в мировой практике разработки безщеточных систем возбуждения с управляемым вращающимся тиристорным выпрямителем. В этих системах ток возбуждения турбогенератора регулировался непосредственно тиристорами вращающегося моста. Основная проблема была в способе передачи импульсов управления на вращающиеся элементы. Проблема была решена с появлением мощных оптических тиристоров. Но, ввиду своей уникальности (системы разрабатывались для сверхмощных турбогенераторов АЭС 1000 и 1500 MW), здесь они не рассматриваются.
С выпуском синхронных машин большой мощности (500MW и выше) и строительстве системообразующих линий электропередач высокого напряжения (500kV и выше) возможности высокочастотных систем по мощности, быстродействию и поддержанию устойчивости энергосистемы оказались исчерпанными. Так, на Сургутской ГРЭС-1 первые 6 генераторов ТВВ-200 имеют ВЧ-систему возбуждения, но при загрузке линии 500kV (1500км) возникали периодические качания, не позволяющие вывести линию на проектную мощность.
2.2 Характеристики систем, Основными техническими характеристиками систем возбуждения являются:
1. Тип системы возбуждения – классификация систем возбуждения по типу основана на конструктивных и технических особенностях системы. Общая классификация различает электромашинные, высокочастотные, бесщеточные и статические (тиристорные) системы возбуждения. Более подробная классификация будет приведена в соответствующих главах настоящего раздела;
2. Номинальное напряжение возбудителя – паспортное значение номинального напряжения силового агрегата на стороне его подключения к цепям ротора синхронного генератора, должно быть не менее номинального напряжения возбуждения синхронной машины;
3. Номинальный ток возбудителя – паспортное значение номинального тока силового агрегата на стороне его подключения к цепям ротора синхронного генератора, должен быть не менее номинального тока возбуждения синхронной машины;
4. Форсировочная способность возбудителя – паспортное значение максимального тока возбудителя, отнесенного к его номинальному току. Согласно ПТЭ, кратность форсировки рабочих систем возбуждения синхронных генераторов должна быть равна 2. Для резервных систем возбуждения – не менее 1,3 (но не более 2-х);
5. Быстродействие системы возбуждения – динамическая характеристика системы возбуждения, определяющая время реакции системы на отклонение регулируемого параметра (напряжения статора);
Генератор постоянного тока
... возбуждения Различаются генераторы независимого от возбуждения и генераторы с самовозбуждением. Генераторы независимого возбуждения делятся на генераторы с электромагнитным возбуждением, в которых обмотка возбуждения ОВ питается постоянным током от постороннего источника (аккумуляторная батарея, вспомогательный генератор или возбудитель ... В современных системах автономного электроснабжения ...
6. Коэффициент усиления системы возбуждения – статическая характеристика системы возбуждения, определяющая силу реакции системы на отклонение регулируемого параметра. Для систем возбуждения коэффициент усиления принято измерять в специальных неименованных единицах, как отношение «Единицы возбуждения» к «Единице напряжения» (е.в./е.н.), где под единицей возбуждения понимается номинальное значение тока возбуждения синхронного генератора, а под единицей напряжения – номинальное напряжение статора генератора;
7. КПД системы возбуждения – строго говоря, под паспортным значением КПД систем возбуждения подразумевается отношение мощности на выходе системы к полной мощности системы в номинальном режиме работы генератора. То есть КПД систем возбуждения учитывает потерю мощности на трение, вентиляцию и тепловыделение в аппаратуре системы. Но, поскольку энергия, потребляемая системой возбуждения, не производит работы (вместо обмотки возбуждения в ротор можно установить постоянный магнит), то некоторые специалисты считают, что КПД систем возбуждения равно нулю.
8. Надежность системы возбуждения – в паспортах на системы возбуждения приводятся расчетные значения надежности: количество часов наработки на отказ, и срок службы системы возбуждения. Оговаривается, что параметры надежности обеспечиваются только при соблюдении профилактических мероприятий.
Каждый тип системы возбуждения имеет также дополнительные технические характеристики, отражающие особенности конструкции системы данного типа. Например, для электромашинных систем в паспорте указывается номинальная частота вращения возбудителя, параметры и принцип возбуждения возбудителя, и т.д. Высокочастотные системы различаются по рабочей частоте возбудителей. Тиристорные системы могут быть одно – и многогрупповыми, самовозбуждения и независимого возбуждения, с сериесными трансформаторами или без них, и т.д.
3. Постановка задачи.
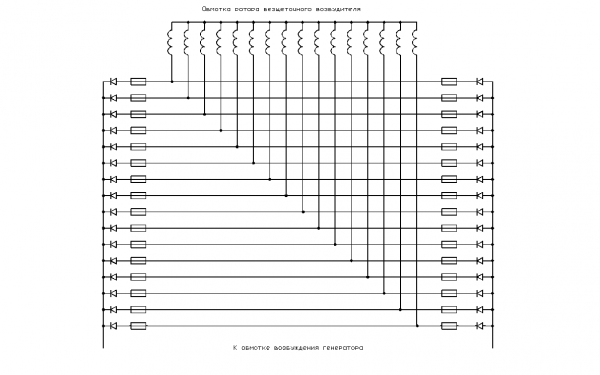
На Тобольской ТЭЦ в качестве системы возбуждения турбогенератора используется безщеточная система. В качестве возбудителя используется обращенная синхронная машина, ротор которой состыкован с ротором возбуждаемого турбогенератора. На статоре возбудителя находится обмотка, питаемая постоянным током, на роторе 16-ти фазная обмотка, от которой через неуправляемые вентили получает питание обмотка ротора турбогенератора. Машина работает с частотой 3000 оборотов в минуту. Последовательно с каждым вентилем включен предохранитель. Таким образом, мы должны контролировать 16 предохранителей анодной группы и 16 предохранителей катодной группы, входящих в группу 16 фазного выпрямителя, вращающегося 3000 оборотов в минуту.
Контроль предохранителей очень важен для режима работы машины и чрезвычайно важен для работоспособности возбудителя. В случае отсутствия контроля перегоревших предохранителей мы попадаем в режим повышенной токовой нагрузки на обмотки возбуждения, что может привести к критическому отказу возбудителя с последующим дорогостоящим и очень длительным ремонтом машины.
-
3.1 Назначение системы контроля перегорания предохранителей.
39 стр., 19463 словМодернизация системы судового освещения танкера «Tavrichesky Bridge»
... систем судового освещения позволяет сделать вывод о значительном потреблении электроэнергии системами судового освещения: до 39,7 кВт, освещение надстройки; до 21,1 кВт освещение машинного отделения; 1,2 кВт навигационное освещение. Модернизация систем судового освещения ... защиты: IP23; Система возбуждения: бесщёточный с самовозбуждением; Тип ротора: цилиндрический; Система охлаждения: воздушная; ...
-
Система предназначена для определения количества перегоревших предохранителей, определение номеров перегоревших предохранителей, выдачи в зависимости от количества перегоревших предохранителей команды на ограничения тока возбуждения турбогенератора или на гашение поля и остановки агрегата.
4. Принятие технического решения.
До последнего времени в качестве системы контроля использовалась система УБК, выполненная на основе моделей “Логика-Т”. Система в настоящее время неисправна и восстановлению не подлежит. Станция предложила нашей организации разработать систему для замены УБК, используя существующие датчики контроля.
Во время проверки имеющегося оборудования стало понятно, что можно использовать существующие датчики тока в предохранителях (1ДТ, 2ДТ), датчики опроса и сброса (1ДМ1, 2ДМ1) , датчики импульсов переключения (1ДМ15, 2ДМ15).
Датчик тока в предохранителях ДТ представляет собой П – образный сердечник, нашихтованный из тонких листов электротехнической стали с двумя обмотками на его полюсах. Датчик устанавливается на неподвижной части возбудителя вблизи вращающихся шин с током через предохранители таким образом, чтобы в момент прохождения шины под датчиком ток в ней был максимален. Датчики тока устанавливаются на возбудителе согласно чертежу.
Датчик импульса опроса ДМ1 и датчик переключающих импульсов ДМ15 состоят из П-образных сердечников из магнитомягкой стали с двумя обмотками на полюсах. Одна обмотка рабочая, другая – подмагничивания.
ДМ15 – устанавливается вблизи немагнитного диска с магнитными клиньями. Диск жестко насажен на вал возбудителя. Число клиньев m – 1 , где m – число фаз возбудителя ( в нашем случае m = 16).
ДМ1 – устанавливается вблизи немагнитного диска с одним клином. Установка ДМ1 и ДМ15 на возбудителе производится согласно чертежу. Подмагничивание датчиков ДМ1 и ДМ15 осуществляется через добавочный резистор и дроссель от блока питания 24В шкафа управления.
При прохождении шин с током под ДТ в нем наводятся двуполярные импульсы напряжения соответствующие току через предохранители. При прохождении под ДМ1 и ДМ15 клиньев немагнитных дисков меняется магнитная проводимость цепи датчика, что в свою очередь приводит к изменению индукции и в обмотке датчиков наводится ЭДС.
Структурная схема системы показана в приложении.
При анализе осциллограмм датчиков, стало понятно, что на аналоговый вход контроллера будет поступать сигнал частоты 16*50=800Гц. Аналогичные сигналы со сдвигом 1,5 деления ротора имеются для другой группы, всего у нас их две: анодная и катодная.
Амплитуда сигналов на выходе датчиков составляет 4-12V в зависимости от тока фаз., При токе ротора менее 500A на вход системы поступает запрет (от существующего датчика тока).
Таким образом, необходимо задействовать 6 аналоговых входов контроллера и обрабатывать их с частотой, которая необходима для обработки сигнала 1600Гц.
Необходим также модуль релейного ввода для ввода сигнала о токе меньше 500A, модуль вывода для подключения промежуточных реле (количество сгоревших предохранителей).
Настройка операционной системы Windows с помощью Панели управления. ...
Основные настраиваемые объекты - средства управления и оформления. Средствами настройки являются Панель управления (Пуск Панель управления), контекстные меню объектов Windows и элементы управления диалоговых окон операционной системы и ее приложений. Внешний вид стартового ...
Также необходим выходной модуль для контроля номеров перегоревших предохранителей (номер можно наблюдать по светодиодам модуля).
Реакция системы на перегорание может быть не мгновенной, т.е. выходные реле могут сработать с некоторым запаздыванием (примерно несколько периодов или больше это не так критично).
Сигналы с датчиков поступают в шкаф контроллера, где преобразуются компараторами Conv1…Conv6 и поступают на входа контроллера.
На вход контроллера поступает также сигнал о величине тока возбуждения меньшей 500А (при токах ниже 500А система выводится из действия).
Контроллер определяет номера неисправных предохранителей, подсчитывает количество перегоревших предохранителей и формирует на выходе сигналы о количестве сгоревших предохранителей, которые поступают на реле размножения контактов. Выходные контакты реле используются для сигнализации и ограничений в допустимой величине тока возбуждения турбогенератора (запрет форсировки в случае перегорания 2-х и более предохранителей и гашение поля при перегорании 5 и более предохранителей).
На сигнализацию выводится также сигнал о исправности блока питания шкафа контроллера и сигнал об исправности системы.
При выборе контроллера основные критерии были:
- климатические условия эксплуатации
- устойчивость к вибрации
- устойчивость к мощным магнитным полям
-
-
— аппаратная резервируемость, безопасность и реакция на отказы
-
- возможность интеграции в общестанционную АСУ ТП
- гибкость настройки
-
-
-установка дополнительных панелей и интерфейсов для визуализации процессов, управления и архивирования аварийных событий системы
-
— качество разводки и монтажа
-
-достаточное количество входов/выходов
-
-быстродействие
-
- При рассмотрении вариантов марки контроллера, основными кандидатами были Siemens SIMATIC S&-400 и Omron CJ1M/ CQM 1 H .
-
Оба они удовлетворяют требованиям для решения нашей задачи, но как это обычно бывает, основным очень важным критерием является цена.
Система поставляется в виде шкафа одностороннего обслуживания, изготовленного фирмой “Уралтехмаркет”. В шкафу установлены контроллер и блок питания производства фирмы “OMRON”, преобразователи сигналов фирмы “Уралтехмаркет”, блок питания фирмы “OMRON”, трансформаторы питания изготовления завода “Уралэлектротяжмаш”.
На лицевой панели дверки шкафа расположены световые индикаторы исправности системы , индикаторы срабатывания выходных реле количества отказавших предохранителей; индикаторы исправности каждого предохранителя.
Монтаж шкафа выполнен фирмой “Уралтехмаркет” .
В системе используются сигналы датчиков существовавшей системы УБК. Датчики подключаются к шкафу управления экранированным кабелем.
Для подмагничивания датчиков используется блок питания шкафа управления. Обмотки подмагничивания подключаются к блоку питания через существующие в системе УБК дроссели Др1…Др4 и регулируемые сопротивления.
5. Описание контроллера .
Промышленные контроллеры имеют разнообразное применение в промышленности и в быту они предназначены для управления электронными и электрическими аналоговыми и цифровыми устройствами. В составе с вспомогательными устройствами контроллеры выполняют различные функции: обработка информации, управление, регулирование, мониторинг, измерение, сигнализацию, контроль. Основными направлениями применения контроллеров в промышленности является: конвейеры, транспортеры, контроль водоснабжения, автоматы, станки, противоаварийная автоматика и многие другие. Основными направлениями применения контроллеров в быту является: а втоматизация помещений, кондиционирование, автоматические двери, миксеры и мешалки, эскалаторы, водоснабжение и т.д. Так же в большинстве медицинской техники имеется применение контроллеров.
Программируемые контроллеры компании
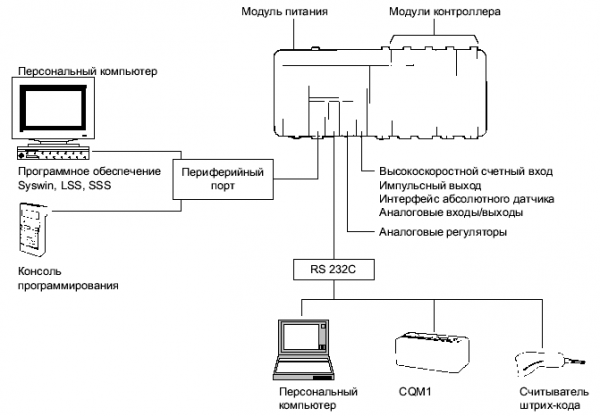
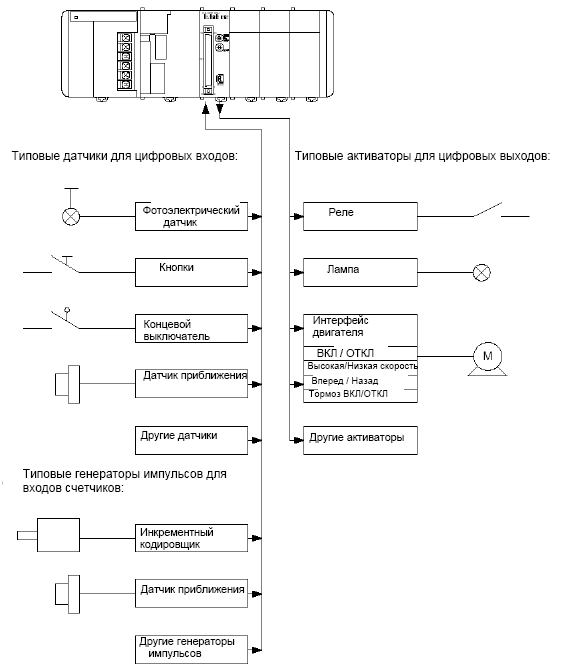
Рис. 14. Возможная схема подключения контролера
Японская фирма OMRON является одним из мировых лидеров в области промышленной автоматизации и программируемые логические контроллеры (ПЛК) начала выпускать одной из первых. Первые контроллеры серии SYSMAC S6 появились в начале 80х годов и изначально использовались для замены традиционных устройств релейной автоматики.
Сегодня ПЛК, благодаря своей универсальности, решают широчайший круг задач и могут применяться в любых отраслях промышленности, в энергетике, металлургии, медицине, транспорте, сельском хозяйстве.
Программируемый контроллер (ПЛК) — устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления. Контроллер реализован на базе микропроцессорной техники и работает в локальных и распределённых системах управления в реальном времени в соответствии с набором программ.
- По функциональным признакам в ПЛК можно выделить следующие элементы:
-
— Центральный процессор, предназначенный для выполнения команд (инструкций) управляющей программы и обработки данных, размещённых в памяти.
-
— Память контроллера с жёстким распределением областей для размещения различных типов данных.
-
— Модули ввода, обеспечивающие приём и первичное преобразование информации от датчиков объекта управления.
-
— Модули вывода, предназначенные для выдачи управляющих сигналов на исполнительные устройства объекта управления.
- По конструктивному исполнению ПЛК могут быть:
-
— Блочного типа
-
— Модульного типа
- По техническим возможностям, которые определяют уровень решаемых задач, ПЛК фирмы OMRON делятся на классы:
-
— Микро (Micro)
-
— Малые (Small)
-
— Средние (Medium)
-
— Большие (Large)
Применение программируемых контроллеров
Программируемые логические контроллеры (PLC) корпорации OMRON (Япония) делятся на четыре класса: Micro (микро), Small (малые), Medium (средние) и Large (большие).
Широкое применение в системах автоматического управления (САУ) непрерывными технологическими процессами получили PLC классов Medium и Large. Сбалансированная совокупность основных характеристик и функциональных возможностей PLC этих классов определило их преимущественное использование в САУ наиболее ответственными объектами. К их числу относятся бортовые установки космических агрегатов, системы управления процессами ядерных технологий, объекты военно-промышленного комплекса, объекты теплоэнергетики. Новой разработкой в этом классе изделий являются программируемые контроллеры серии SYSMAC CS 1 (рис.15).
Рис. 15. Программируемый контроллер
Контроллеры серии
-
Быстродействие (время исполнения инструкции LD ) – 0.04 c ;
-
Количество инструкций — более 400;
-
Количество точек ввода/вывода – 5120;
-
Емкость памяти программ – 250 K шагов;
-
Емкость энергонезависимой памяти данных ( DM ) – 448 Кслов;
-
Емкость карты Flash -памяти – 48 МВ;
-
Номенклатура поддерживаемых модулей (ввода/вывода, специальных, коммуникационных) – более 100 типов.
-
Сети и интерфейсы:
-
Ethernet (FTP, TCP/IP, UDP/IP);
-
Controller Link;
-
PC Link;
-
DeviceNet (CompoBus/D);
-
CompoBus/S;
-
ProfiBus/DP;
-
Host Link;
-
NT Link;
-
Protocol Macros;
-
Peripheral Bus.
В настоящее время выпускается 9 моделей модулей центрального процессора контроллеров серии CS1. Между собой модули CPU (рис. 16.) отличаются количеством бит I/O (минимально 960 бит I/O для CS1G-cpu42; максимально 5120 бит I/O для CS1H-cpu67), емкостью программ (минимально 10Kшагов для CS1G-cpu42; максимально 250К steps для CS1H-cpu67), размером памяти данных (минимально 32К слов для CS1G-cpu42; максимально 448К слов для CS1H-cpu67), наличием или отсутствием EM-памяти. Широкая сетка взаимных сочетаний названных параметров позволяет произвести оптимальный выбор модуля CPU для конкретного технологического процесса. Все типы модулей CPU снабжены коннектором для установки карты Flash -памяти, периферийным портом и портом RS 232 C , а также имеют отсек для установки дополнительных коммуникационных плат.

Рис. 16. Модуль ЦПУ.
Качественно изменились некоторые ранее существующие инструкции процессора и добавились новые, упрощающие программирование сложных алгоритмов. В частности такие инструкции как таймеры и счетчики ранее принадлежали одной области памяти (не могли иметь одинаковые номера в одной программе) и их общее количество для контроллеров. как правило не превышало 512. В программах контроллеров CS1 можно одновременно использовать таймеры и счетчики с одинаковыми номерами. Тех и других может быть по 4096. Появились новые инструкции, позволяющие обрабатывать файловую память, текстовые строки, индексные регистры и многие другие. Используя их, модуль CPU может манипулировать своей собственной памятью. Так, например, из программы лестничных диаграмм можно осуществлять весь набор операций над файлами, расположенными на карте памяти (удалять, копировать, создавать директорию и изменять ее имя).
Программу пользователя, находящуюся в CPU модуле, можно заменить программой из карты памяти не выключая контроллер и без применения средств программирования. Программу пользователя и областей данных можно автоматически сохранить на карте памяти при включении питания («легкое сохранение»).
В случае обнаружения неисправности, все данные, расположенные в модуле CPU будут сохранены мгновенно. Это особенно важно для систем управления с повышенными требованиями к надежности.
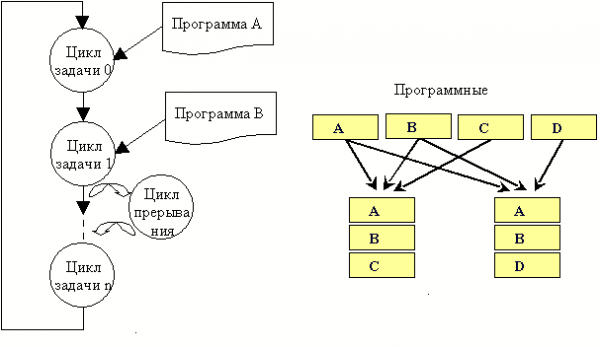
В качестве базовой концепции предложено структурное многозадачное программирование (
Введение структурного программирования преследует
-
стандартизация программ, как модулей;
-
разработка программ несколькими программистами, работающими параллельно;
-
создание программы, более легкой для понимания;
-
создание программ по шагам;
-
использование BASIC -подобных мнемонических инструкций для написания программы, что трудно сделать при лестничном программировании (таких как условные переходы и циклы).
Появление новых инструкций позволяет упростить и саму процедуру программирования. В частности имеется возможность:
-
создавать циклически повторяющиеся программные секции;
-
осуществлять косвенную адресацию слов;
-
использовать индексные регистры как указатели косвенных адресов в адресном пространстве данных (Индексные регистры очень удобны в комбинации с циклами, инкрементными инструкциями и инструкциями обработки табличных данных. Поддерживаются авто-инкремент, авто-декремент, а также функции ветвления.) и т.п.
-
-
Р
 ис. 17.
ис. 17.
-
Несмотря на наличие мощных функциональных возможностей
5.1. Технические характеристики программируемого контроллера фирмы OMRON CQM 1 H .
CQM1H — Усовершенствованный контроллер серии CQM1 класса Small для работы в распределённых системах управления.
-
-
-
-
-
-
-
-
-
-
-
Рис. 5.1. Общая схема
-
-
-
-
-
-
-
-
-
-
Высокое быстродействие, широкие сетевые возможности. Идеально подходит для управления технологическими агрегатами малого и среднего класса. Память программ, память данных и количество точек ввода/вывода увеличены вдвое по сравнению с CQM1. Быстродействие увеличено на 1/3. Возможность работы в сети Controller Link (32 узла в сети длиной до 1км).
Простое редактирование программ контроллера, чтение и запись данных с помощью ПО под Windows. Встраиваемые платы (коммуникационные карты, поддерживающие Protocol Macro, высокоскоростные счётчики), широкий спектр модулей контроллера обеспечивают большую гибкость в построении АСУ ТП.
CQM
На ЦПУ всех типов
Основные характеристики
CQM
-На ЦПУ находятся 16 встроенных входов.
-Для увеличения числа входов/выходов можно добавить модули входов/выходов.
—
-Встроены быстродействующие таймеры и счетчики.
-Выходы обслуживаются сразу при исполнении команд (прямые выходы).
—
-
-Входные прерывания
-
-Прерывания интервального таймера
-
-Прерывания высокоскоростного счетчика
-
Входные прерывания используются для обработки входных сигналов от внешних устройств, когда сигналы короче, чем время исполнения программы. Можно использовать сигналы с шиной импульса 0.1 мкс.
Прерывания интервального таймера можно осуществлять, используя высокоскоростной интервальный таймер.
Выходами могут служить однофазные импульсы частотой до 5 кГц и двухфазные импульсы частотой до 2.5 кГц. Прерывания высокоскоростного счетчика можно объединить с выдачей импульсов и использовать для решения таких прикладных задач, как управление двигателем. Высокоскоростной счетчик имеет 2 дополнительные точки.
Функция выдачи импульсов
Импульсы частотой до 1 кГц можно выдавать с контактов модуля транзисторных выходов.
Связь
Имеются периферийный порт и порт
-HOST LINK
-RS-232
—
CQM
CQM
Можно создать линию данных с областью данных в другом контроллере
Функция аналоговых регуляторов
На контроллерах
Удобные инструкции ввода/вывода
Можно использовать одну инструкцию для ввода или вывода данных, что упрощает программу.
Инструкцию «ввод с клавиатуры 10 клавиш» можно использовать для чтения двоично-десятичного восьми разрядного числа с клавиатуры 10 клавиш.
Инструкцию «ввод с клавиатуры 16 клавиш» можно использовать для чтения двоично-десятичного восьми разрядного числа с клавиатуры 16 клавиш.
Инструкцию «ввод символа с цифрового переключателя» можно использовать для чтения четыре разрядного или восьми разрядного двоично-десятичного числа с цифровых переключателей.
Инструкцию «вывод на семи сегментный индикатор» можно использовать для выдачи четырех или восьми разрядного числа на семи разрядный индикатор.
Просмотр изменения состояния бита
До сих пор слежение за изменением состояния битов было доступно только на ПК самого высокого класса. Просмотр изменения бита дает сигнал в момент изменения бита с 0 на 1 или с 1 на 0. Данную функцию можно использовать для просмотра состояния выходов или битов, которые включаются или выключаются за слишком короткие интервалы времени.
Таблица 4
Характеристики промышленного контроллера
|
Параметр |
Значение |
|
Максимальное число точек входа / выхода |
512 |
|
Модули входа/выхода (кол-во точек) |
8 / 16 / 32 точки |
|
Память программы |
15 К слов |
|
Количество инструкций |
137 |
|
Время исполнения базовой инструкции, мкс |
0.357 мкс |
|
Область IR, бит |
2,720 |
|
Область SR, бит |
192 |
|
Область TR, бит |
8 |
|
Область HR, бит |
1600 |
|
Область AR, бит |
448 |
|
Область LR, бит |
1024 |
|
Область DM |
6144 слов |
|
Счетчики / таймеры |
До 512 |
|
Коммуникационные возможности |
Controller Link CompoBus/D (Devicenet) CompoBus/S AS-i Bus Host Link NT Link 1:1 Link Protocol Macro |
|
Специальные функции |
Аналоговые входы / выходы Контроль движения / позиционирования Высокоскоростные счетчики Контроль температуры Модули датчиков Модули линейных датчиков |
6. Примеры программ для контроллера
Что бы понять общую концепцию программирования промышленных контроллеров, рассмотрим простой пример.
Управление потоком.
- Пункты конфигурации, описанные в этом примере:
-
— Простой счетчик (для простого счетчика не нужна никакая DM -конфигурация).
-
- Описание приложения:
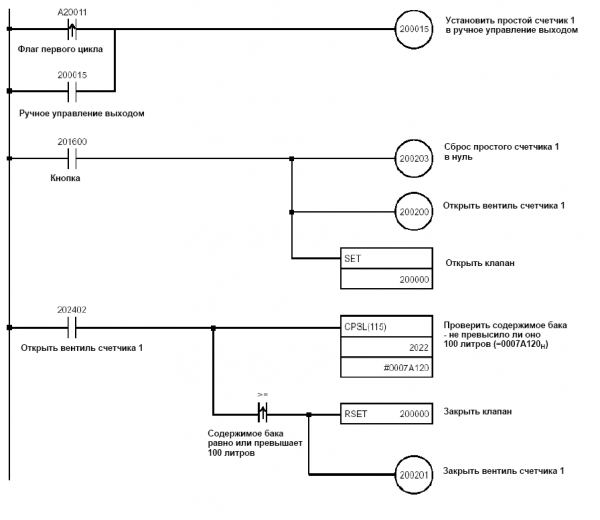
- В следующем примере бак необходимо наполнить заданным количеством жидкости. При нажатии кнопки выполняется сброс простого счетчика, открывается вентиль простого счетчика и открывается клапан. Жидкость протекает через клапан и измеритель потока (расходомер) в бак. Импульсный выход измерителя потока выдает сигнал о потоке жидкости, причем количество импульсов пропорционально потоку (5000 импульсов эквивалентны 1 литру).
После того, как в бак будет залито ровно 100
- литров жидкости, клапан и вентиль простого счетчика автоматически закрываются.
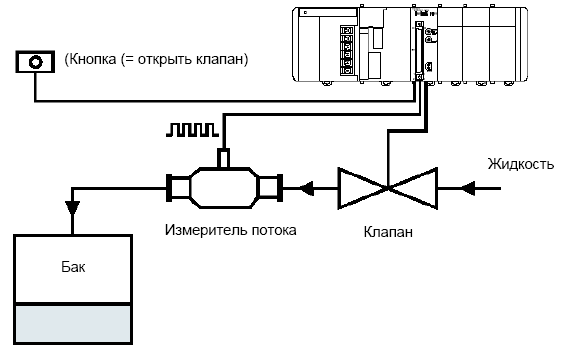
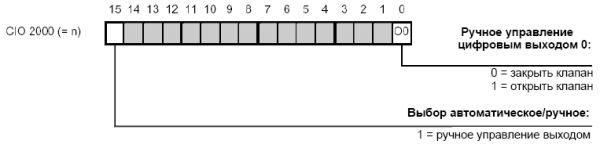
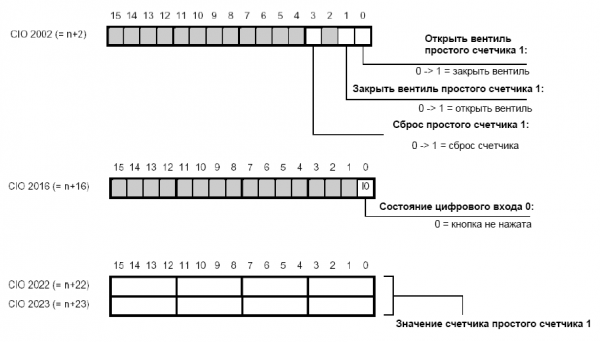
Кнопка подключена к цифровому входу I0 и клапан подключен к цифровому выходу O0. Блока высокоскоростных счетчиков. Импульсы с измерителя потока подсчитываются счетчиком 1, который сконфигурирован как простой счетчик (соответствующий переключатель DIP на передней панели Блока стоит в положении ОТКЛ).
Номер аппарата Блока высокоскоростных счетчиков равен 0. Высокоскоростному счетчику отведено 40 слов в CIO, начиная с CIO 2000 (n= CIO 2000 = 0 x 10).
Для управления этим приложением нужно написать небольшую программу ступенчатой логики для ПЛК. Программа взаимодействует с Блоком высокоскоростных счетчиков через область блока специального I/O в CIO.
Для управления приложением используются следующие слова CIO, их необходимо использовать в программе ступенчатой логики.
При выполнении дипломного проекта была произведены: разработка проектных чертежей, разработка алгоритма работы системы управления, произведен отбор оборудования по техническим требованиям, а также выбор производителя оборудования. Так же были изучены общие концепции в программирование контроллеров. Система полностью собрана и проведены все необходимые проверки, в настоящее время поставлена на Тобольскую ТЭЦ, пуск и наладка системы запланирован на третий квартал 2007 года. Предусмотрено на последующих этапах работы развитие системы наращиванием контроллера дополнительными блоками в направлении:
— установка панели управления для визуализации процессов
-управления и архивирования аварийных событий системы
-интеграция в общественную АСУ ТП
-
-использование этого же контроллера для решения дополнительных задач (параллельно основной)
- В настоящие время в Российской энергетике существует множество задач, подобных той, что была решена в данной дипломной работе, их решением я буду продолжать заниматься в дальнейшем.
Список литературы
[Электронный ресурс]//URL: https://inzhpro.ru/diplomnaya/sistema-vozbujdeniya-generatora/
-
Техническое описание оборудования компании « Omron ». – OMRON Corporation , 2003.
2. Веников В.А. Переходные электромеханические процессы в электрических системах: Учеб. для электроэнергет. спец. вузов. – 4-е изд., перераб. и доп. – М.: высш. шк., 1985. – 536с., ил.
3. Основы автоматики энергосистем/ М.А. Беркевич, А.Н. Комаров, В.А. Семенов. – М.: Энергоиздат, 1981.- 432с., ил.
4. Методические указания по наладке систем возбуждения
5. Системы возбуждения турбогенераторов, гидрогенераторов и синхронных компенсаторов. Общие технические условия. Введен 1.07.2003. М.: Изд-тво стандартов, 2003.
6. Правила устройства электроустановок. М.: Энергоатомиздат, 1986