
, КЛАССИФИКАЦИЯ ПРЕОБРАЗОВАТЕЛЕЙ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Измерение неэлектрических величин сводится к тому, что они преобразуются в зависимую от них величину, при измерении которой определяется и неэлектрическая величина.
Электрические приборы для измерения неэлектрических величин состоят из трех узлов: преобразователя (датчика), измерительного устройства и указателя.
Преобразователь (датчик), Основной характеристикой, Чувствительность
порогом чувствительности
Предел преобразования, Погрешностью преобразователя
В зависимости от того явления, которое используется для преобразования неэлектрической величины в электрическую, преобразователи делятся на три группы:
- электромеханические (контактные, реостатные, тензометрические, электростатические, электромагнитные);
- тепловые и электрохимические (термоэлектрические, термосопротивления, электрохимические);
- электронные и ионизационные (электронные, ионные, ионизационные).
параметрические
Если входная неэлектрическая величина преобразуется в один из параметров электрической цепи ( R — сопротивление, L — индуктивность, М — взаимная индуктивность, С — емкость), для измерения которой
параметрическим
параметрическим измерительным преобразователям
генераторным измерительным преобразователям
К преобразователям как основным элементам приборов для измерения неэлектрических величин предъявляется ряд специфических требований: постоянство во времени функции преобразования (обычно линейной); высокая чувствительность; малая погрешность; высокие динамические свойства (возможность измерения переходных процессов).
Измерительные устройства, Указатель
По способу снятия отсчета указатели делятся на:
визуальные
регистраторы
Основные требования к указателям такие же, как и к приборам для измерения электрических величин.
2.1. Реостатные преобразователи
Реостатный преобразователь представляет собой реостат, движок которого перемещается под воздействием измеряемой неэлектрической величины X , создавая зависимость:
R=f(x),
где R — сопротивление преобразователя.
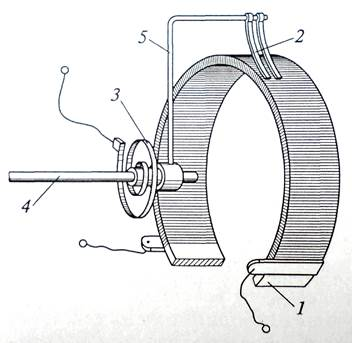
На рис. 1 представлено устройство реостатного преобразователя, выполненного в виде изогнутой пластины 1 из изоляционного материала (текстолит, пластмасса, алюминий, покрытый лаком), на которую намотана проволока с большим удельным сопротивлением и малым температурным коэффициентом сопротивления, изготовленная из манганина, платиноиридиевых сплавов. Для более плавного изменения сопротивления и уменьшения
По физике «Возникновение мер и измерений величин»
... раздел. В нем говорится о том, какие же меры измерения величин использовали в Древней Руси и Западной Европе. 2. ... рассмотреть меры измерительных величин до возникновения системы СИ в разных странах. В-третьих: рассмотреть физические единицы измерения и систему СИ. ... равная 0,1 линии. Возможно отсюда появилось слово точность. Для измерения больших расстояний в древности была введена мера, называемая ...
момента трения щетки о контактную поверхность число витков обмотки должно быть возможно большим. Контактная щетка 2, выполняемая из платиноиридиевого сплава или серебра, перемещается по очищенной от изоляции обмотке посредством поводка 5, укрепленного на оси 4, связанной с объектом измерения. Напряжение со щетки снимается через токоподвод к щетке (спиральную пружину) 3.
Для получения надежного контакта щетки с проволокой необходимо обеспечить контактное усилие порядка 5… 10 г. В настоящее время имеются преобразователи с контактным усилием от 0,5 до 2,0 г.
Реостатные преобразователи применяются в приборах для измерения линейных и угловых перемещений, а также для измерения ряда других величин, которые могут быть механически преобразованы в линейные или угловые перемещения.
|
Рис.1 Устройство реостатного преобразователя: |
 1 — изогнутая пластина из изоляционного материала; 2 — контактная щетка; 3 — токоподвод к щетке; 4 — ось; 5 — поводок
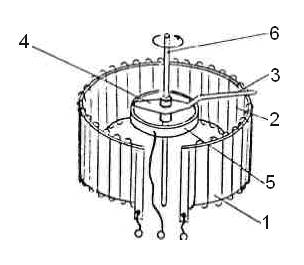
1 — изогнутая пластина из изоляционного материала; 2 — контактная щетка; 3 — токоподвод к щетке; 4 — ось; 5 — поводок Рис. 2 Устройство реостатного преобразователя:
На корпус 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса защищается, и по металлу перемещается щетка 3. Добавочная щетка 4 скользит по токосъемному кольцу 5. Обе щетки изолированы от приводного валика 6. В качестве материала провода для реостатных преобразователей применяют манганин, константан или фехраль. В ответственных случаях используют платиноиридиевую проволоку (90% Pt + 10% Ir).
Диаметр проволоки равен 0,03 мм. Это позволяет изготавливать малогабаритные высокоомные преобразователи (весом 10-12 г при размерах 1×2 см)
Данные о материалах проволоки, употребляемой
|
Название материала |
Состав, % |
Удельное сопротивле-ние, Ом |
Температурный коэффициент сопротивления 1/Cх10- 6 |
Максим. рабочая темпер., °С |
Температур-ный коэффициент линейного расширения 1/°Сх10 6 |
|
Константан Нихром Манганин Фехраль Никель |
60 Cu ; 40 Ni ; 60 Ni ; 15 Cr 85 Cu ; 12 Ma ; 2-4 Ni 80 Fe , 12-150 Cr 3-4,5 Al 99,5 Ni |
0,480 1,1-1,2 0,42-2,08 1,38 1,38 0,0703-0790 |
5 130 29-40 при 20°C-15°C при 400°С-50°C 6,000 |
500 1050 300 1200 1200 – |
15,2 14 23 17 17 13,1 |
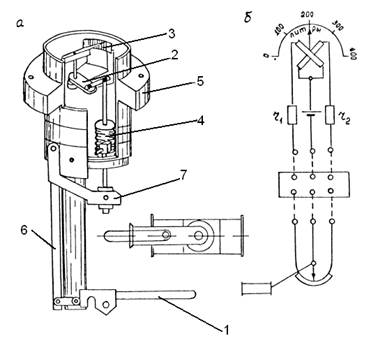
Электрический бензинометр применяется для измерения уровня горючего в баках автомобиля, самолета и тому подобное. Устройство при бора изображено на рис. 3, а.
От поплавка 1, погруженного в бак с бензином, идут тяги и рычаги 6 и 7 к движку 2 реостатного преобразователя 3. Для того чтобы пары горючего не могли проникнуть в камеру реостатного преобразователя, рычаг, передающий перемещение поплавка к движку, проходит через гибкую металлическую гофрированную трубку (сильфон) 4; эластичный сильфон, герметизируя камеру, не препятствует качанию рычага. Преобразователь крепится к баку при помощи фланца 5. Измерительная цепь уровнемера показана на рис. 3, (б).
Здесь указателем является магнитоэлектрический логометр, обе рамки которого включены последовательно.
2.2. Индуктивные и индукционные преобразователи, Индуктивный преобразователь.
Принципиальные схемы индуктивных преобразователей показаны на рис. 6 Индуктивный преобразователь (см. рис. 6, а — схема для измерения малых перемещений) представляет собой электромагнит 1 с воздушным зазором, величина (длина) 5 которого изменяется в
функции от измеряемой механической величины F . Особенно
широко применяются дифференциальные преобразователи (см.
рис. 6, б), в которых одновременно и притом с разными знаками изменяются два зазора двух электромагнитов, что увеличивает чувствительность и улучшает другие характеристики преобразователя.
R M
l i
Изменение магнитного сопротивления R м оценивается по величине полного сопротивления Z катушки 2 (см. рис. 6, а), так как при перемещении якоря 3 изменяются как активное, так и реактивное сопротивления катушки. Первое изменяется в результате изменения потерь на гистерезис и вихревые токи, а второе — из-за изменения индуктивности катушки.
Индуктивность катушки связана с магнитным сопротивлением R м следующей зависимостью: L =Ф ω / l = Iω / Rm I * ω / I = ω 2 / Rm , где li , si , μ i — длина, площадь поперечного сечения и магнитная проницаемость j -го участка стальной части магнитной цепи; \х0 — магнитная проницаемость воздуха; δ и s — длина и площадь поперечного сечения воздушного зазора.
Изменение магнитного сопротивления R м оценивается по величине полного сопротивления Z катушки 2 (см. рис. 6, а), так как при перемещении якоря 3 изменяются как активное, так и реактивное сопротивления катушки. Первое изменяется в результате изменения потерь на гистерезис и вихревые токи, а второе — из-за изменения индуктивности катушки.
Индуктивность катушки связана с магнитным сопротивлением R м следующей зависимостью: L =Ф ω / l = Iω / Rm I * ω / I = ω 2 / Rm , где Ф — магнитный поток; ω — число витков катушки; I— ток в катушке.
R Fe
R Fe
Таким образом, в индуктивных преобразователях имеет место
последовательное преобразование F→∆δ→R M → Z. Преобразователи описанных типов применяются при сравнительно небольших перемещениях якоря относительно сердечника. Для измерения больших перемещений якоря используются дифференциальные индуктивные преобразователи с разомкнутой магнитной цепью (см. рис. 6, в), в которых якорь 3
перемещается внутри катушек 2, изменяя их полные сопротивления.
Приборы с индуктивными преобразователями могут быть использованы для измерения, как перемещения, так и любых механических величин, функционально связанных с перемещением якоря, например сил, давлений, крутящих моментов и т.д.
Индукционный преобразователь.
Он представляет собой преобразователь, в котором измеряемая неэлектрическая (механическая) величина преобразуется в индуктированную ЭДС. Согласно закону электромагнитной индукции индуктированная электродвижущая сила Е определяется скоростью изменения магнитного потока Ф, сцепленного с катушкой из w витков:
 |
Индукционные преобразователи непосредственно могут применяться только в приборах для измерения скорости линейных или угловых перемещений.
На практике индукционные преобразователи применяются в приборах для измерения скорости вращения (в тахометрах), а также в приборах для измерения параметров вибраций, т.е. для измерений переменных во времени линейных и угловых перемещений и ускорений (в виброметрах и акселерометрах).
Индукционные преобразователи для тахометров представляют собой небольшие генераторы постоянного или переменного тока, вал которых механически связан с валом испытуемого двигателя. Чаще всего применяют генераторы переменного тока. Электродвижущая сила генератора Е, как известно, выражается уравнением:
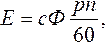 |
где с — конструктивная постоянная, определяемая числом витков
и числом пар параллельных ветвей; Ф — поток возбуждения, создаваемый обычно постоянными магнитами; р — число пар полюсов; n — число оборотов в минуту (скорость вращения).
Величина pn /60 = f является частотой переменной ЭДС, индуктируемой в генераторе.
Таким образом, критерием измеряемой скорости вращения может служить либо ЭДС генератора Е, либо частота f . Принцип устройства индукционных преобразователей приборов для измерения параметров вибраций и ускорений показан на рис. 7.
На рис. 7, а представлен принцип устройства индукционных преобразователей приборов для измерения линейных вибраций. Цилиндрическая катушка 1, связанная с объектом измерения посредством вала 2 и расположенная в кольцевом зазоре магнитопровода 3, совершает линейные перемещения (колебания) в направлении, указанном стрелками. Цилиндрические постоянные магниты 4 намагничены вдоль образующей и создают в зазоре радиальное поле. При своем перемещении витки катушки под прямым углом пересекают линии магнитного поля и в них индуктируются ЭДС.
Если линейное перемещение ∆ х является некоторой функцией времени ∆х = = f ( t ), то мгновенное значение ЭДС E=ωBla , где число витков катушки; В — индукция в зазоре; l а — активная длина витка.
Точно так же индуктируется ЭДС в цилиндрической катушке 1 (см. рис. 7, б), помещенной на ферромагнитный сердечник 5, когда он вместе с катушкой совершает угловые перемещения в направлении, указанном стрелкой.
Схема устройства
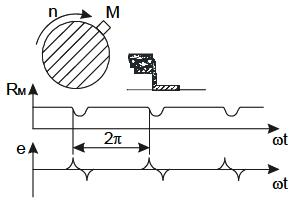 |
На валу укреплен стальной зуб М . При вращении вала этот зуб проходит мимо зазора неподвижно установленной магнитной системы с постоянным магнитом, уменьшая сопротивление зазора так, как показано на кривой R М . При этом в катушке, надетой на магнит, наводятся импульсы ЭДС, форма которых показана на кривой е . Частота импульсов, выраженная в герцах, всегда будет в точности равна скорости вращения вала, выраженной в числе оборотов в секунду.
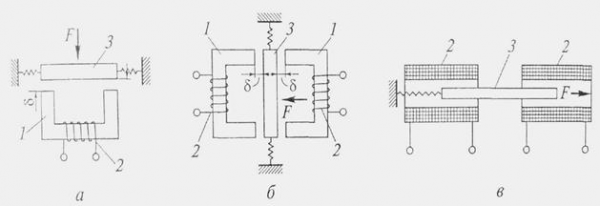
Рис. 6 Принципиальные схемы индуктивных преобразователей:
а — для измерения малых перемещений; 6 — дифференциальный преобразователь; в — для измерения больших перемещений; 1 — электромагниты; 2 — катушки; 3 — якорь
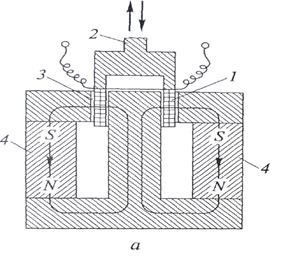
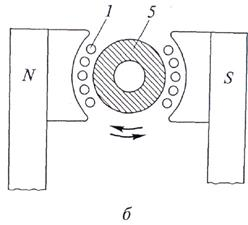
Рис. 7 Принцип устройства индукционных преобразователей приборов
для измерения параметров вибраций и ускорений:
- а — Для измерения линейных вибраций;
- б — для измерения угловых вибраций;
1 — цилиндрическая катушка; 2- вал, связывающий катушку с объектом
измерения; 3 — зазор магнитопровода; 4- постоянные магниты;
5 — ферромагнитный сердечник
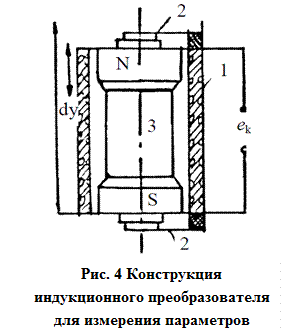
Индукционный преобразователь для измерения параметров
Индукционный преобразователь схематически изображен на рис. 4 и представляет собой цилиндрическую катушку 1, внутри которой на плоских пружинах подвешен постоянный магнит 3.
e k
Приборы, с помощью которых измеряется скорость колебаний, называются волосиметрами.
e k
Для этой схемы уравнение мгновенных значений ЭДС будет иметь вид:


2.3. Емкостные преобразователи
Емкостным преобразователем является плоский или цилиндрический конденсатор, емкость которого изменяется с изменением измеряемой неэлектрической величины.
Как известно, емкость плоского конденсатора выражается формулой:
 |
где ε — диэлектрическая проницаемость; s — площадь обкладки; δ — расстояние между обкладками.
Измеряемая неэлектрическая величина может быть функционально связана либо с диэлектриком, либо с площадью, либо с расстоянием между обкладками.
На рис. 8, а иллюстрируется принцип действия емкостного преобразователя прибора для измерения уровня жидкости. Он представляет собой коаксиальный конденсатор.
Для каждого значения уровня емкость преобразователя может быть определена как емкость двух параллельно соединенных конденсаторов. Один конденсатор образован частью электродов и диэлектриком — жидкостью, уровень которой измеряется, а второй образован остальной частью электродов и диэлектриком Я воздухом.
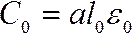 Если трубка преобразователя была бы заполнена воздухом, то емкость конденсатора можно было бы выразить с достаточной точностью следующей формулой:
Если трубка преобразователя была бы заполнена воздухом, то емкость конденсатора можно было бы выразить с достаточной точностью следующей формулой:
где а — конструктивный параметр преобразователя, зависящий от поверхности внутреннего стержня, внутренней поверхности трубки и расстояния между электродами; l 0 — полная длина преобразователя (трубки); е0 — диэлектрическая проницаемость воздуха.
Если часть трубки длиной l заполнена жидкостью с диэлектрической проницаемостью ε то емкость этой части преобразователя составит:
С 1 =
С= alε + a ( l 0 — l ) ε 0
Таким образом, С = f (l ).
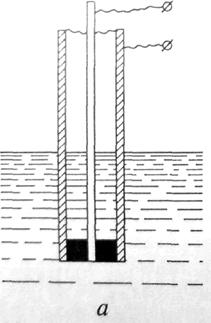
На рис. 8, б демонстрируется принцип использования емкостного преобразователя для измерения малых перемещений Х или других механических величин (силы, давления и др.), вызывающих перемещение подвижной обкладки 1 относительно неподвижной обкладки 2.
При использовании емкостных преобразователей необходимо обратить особое внимание на влияние паразитных емкостей, главным образом емкости соединительных проводов (линии) относительно земли. Во многих случаях паразитные емкости сравнимы с емкостью преобразователя. Поэтому вопросом экранирования соединительных проводов и правильного выбора точки заземления измерительной цепи следует уделять большое внимание.
Экранирование самого преобразователя от влияния электрических полей также весьма важно, обычно экраном служит металлический корпус преобразователя.
 |
 |
Рис. 8 Принципиальные схемы емкостных преобразователей:
а — для измерения уровня жидкости; б — для измерения малых перемещений; 1 — подвижная обкладка конденсатора; 2 — неподвижная обкладка конденсатора
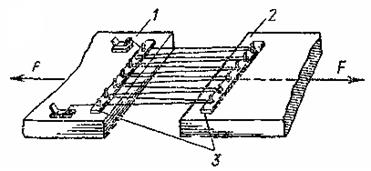
2.4. Тензорезисторы
Тензорезисторы предназначены для измерения деформаций и механических напряжений, обусловленных этими деформациями. Они представляют собой тонкую (диаметром 0,02…0,04 мм) зигзагообразно уложенную и приклеенную к полоске бумаги 1 проволоку А (рис. 9, а), изготовленную из материала высокого удельного сопротивления. Бумага с проволокой прочно приклеивается к поверхности испытуемой детали так, чтобы направление ожидаемой деформации совпадало с длинной стороной петель проволоки. Для приклейки тензорезисторов к исследуемым деталям применяют специальные клеи. Разработаны клеи для работы в нормальных условиях (БФ-2; БФ-4, ацетоноцеллулоидные), в условиях повышенных и высоких температур—до 600-700° С (Б-56, ВН-15), а также при работе во влажной среде или в воде. Тогда при деформациях детали, например при ее растяжении или сжатии, проволока будет воспринимать эти деформации, вследствие этого ее длина l и диаметр будут изменяться. Кроме того, как показывает опыт, при этом может измениться и ее удельное сопротивление. В результате произойдет изменение сопротивления R проволоки, являющееся функцией деформации детали и, следовательно, функцией механических напряжений в ней.
 Относительное изменение сопротивления может быть выражено следующим образом:
Относительное изменение сопротивления может быть выражено следующим образом:
где ∆ l / l — относительная деформация; σ — напряжение в детали.
Опыт показывает, что функция /(5) при небольших деформациях является линейной:

Для изготовления тензорезисторов целесообразнее использовать такую проволоку, которая обладала бы возможно большей чувствительностью, т. е. возможно большим значением коэффициента К. Чаще всего для ее изготовления используется проволока из константана, для которого К = 1,9…2,1.
Так как относительные деформации ∆ l /l , например, стальных деталей в пределах упругих деформаций не превосходят 2,5
- 10-3 , то ∆ R / R = К∆l/l не превосходят 5
— 10-3 , т.е. 0,5 %. При столь малых рабочих изменениях сопротивления преобразователя весьма важно, чтобы изменение его сопротивления из-за возможных колебаний температуры испытуемой детали, к которой он приклеен, не вызывало изменения показаний прибора. Поэтому проволока должна обладать возможно меньшим температурным коэффициентом сопротивления. Константановая проволока имеет достаточно малый температурный коэффициент сопротивления от 0,02 до 0,05 % на 10 °С. Однако при изменении температуры, например на 20 °С, относительное изменение сопротивления такой проволоки может достигать 0,1 %, что соизмеримо с рабочим изменением сопротивления, обусловленным измеряемой деформацией.
С точки зрения малого температурного коэффициента лучше всего использовать манганин, однако относительная чувствительность коэффициента манганиновой проволоки в три-четыре раза меньше, чем чувствительность проволоки, изготовленной из константана.
При использовании тензорезистора необходимо принимать меры для компенсации температурной погрешности.
Длина петли преобразователя l называется базой преобразователя. Размеры тензорезисторов колеблются от 2,5 до 150 мм по длине и от 3 до 60 мм по ширине. Сопротивление преобразователя чаще всего составляет 100…200 Ом. К концам проволоки, уложенной зигзагообразно на бумагу, привариваются или припаиваются выводы 3 (см. рис. 9, а). Увеличение числа витков тензометра будет повышать его чувствительность.
В настоящее время тензорезисторы также изготовляются из тонкой фольги. Для этого на ленте из фольги путем травления выбирается часть металла таким образом, что оставшаяся часть материала образует форму тензорезистора.
Проволочные преобразователи применяются непосредственно для измерения деформаций. Однако они также используются и для измерения других механических величин, которые могут быть преобразованы в деформацию вспомогательной детали (называемой обычно упругим элементом), воспринимающей измеряемую механическую величину. Например, балку с наклеенными тензорезисторами R 1 и R 2 (рис. 9, б) можно использовать для измерения силы F или перемещений, если объект измерения при своем перемещении будет воздействовать на свободный конец балки, т.е. вызывать ее прогиб. Тогда деформация балки будет функционально связана с измеряемой величиной.
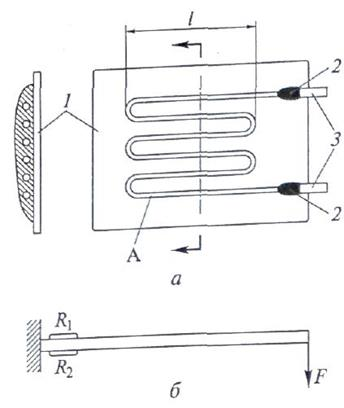
Рис. 9 Тензорезистор (проволочный преобразователь):
а — схема тензометра; б — схема расположения тензометра для измерения силы и деформации; А — проволока; 1 — бумага; 2 — сварка или силы и деформации; 3 — выводы
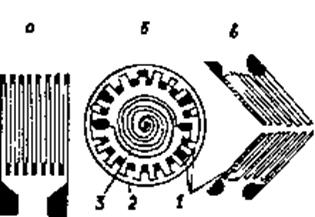
Рис. 10 Фольговые преобразователи:
а – для измерений линейных деформаций; б – наклеиваемый на мембрану для измерения давления: 1 – подгонные петли; 2 – витки, чувствительные к усилиям, растягивающим мембрану; 3 – витки, чувствительные к сжимающим усилиям; в – наклеиваемый на мембрану для измерения крутящих моментов.
Тензосопротивления используются в приборах для измерения деформаций неэлектрических величин: усилия, давления, моментов и так далее. Для примера рассмотрим устройство прибора для измерения давления (манометр) с использованием проволочных тензосопротивлений (рис. 11).
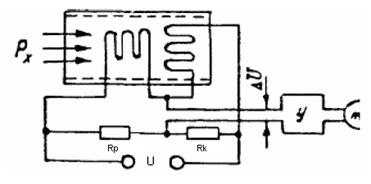
Рис. 11 Манометр с тензометрическим преобразователем
Схема состоит из измерительного преобразователя – стального цилиндра с наклеенными тензосопротивлениями Rp и Rk , включенными в мостовую схему усилителя с миллиамперметром на выходе. Зависимость деформации и поверхности цилиндра ε l от давления можно определить по формуле: ε l = Px r / Eh , где Р x – измеряемое давление; r , h – радиус и толщина стенок цилиндра; Е – модуль упругости стали. Деформация ε l воспринимается рабочим тензосопротивлением Rp . Компенсационное тензосопротивление Rk , наклеенное вдоль образующей цилиндра, служит для температурной компенсации.
 |
В целях увеличения мощности рассеяния тензорезистора применяют проволочные решетки, закрепленные по концам, — «открытые конструкции» . Здесь части 1 и 2 связаны с объектом и могут перемещаться относительно друг друга. Проволока закрепляется на стойках 3 из изолирующего материала (керамика).
2.5. Термометры электрического сопротивления
термометрами электрического сопротивления,
Наибольшее распространение получили преобразователи термометров сопротивления, выполненные из платиновой или медной проволоки.
Платиновые терморезисторы применяются для измерения температур в интервале от -183 до +500 °С (температура кипения кислорода составляет -182,97 °С).
Зависимость сопротивления платины от температуры t в диапазоне от 0 до +660 °С подчиняется следующему выражению:
R t = R 0 (1+ β 1 t + β 2 t )
где R 0 — сопротивление при температуре 0 °С
В интервале от 0 д||-183 °С зависимость сопротивления платины от температуры выражается уравнением:
R 1 = R 0 [1+ β 1 t + β 2 t 2 + β 3 ( t -100) t 3 ]
Значения температурных коэффициентов в приведенных выше формулах следующие:
β 1 = 3,940*10-3 1/1°C; β 2 = -5,8*10-7 1/1°C; β 3 = 4*10-12 1/1° С
Термометры сопротивления с преобразователем из медной проволоки применяются для измерения температур не выше
100…150°С, так как при более высоких температурах медь заметно окисляется.
Зависимость сопротивления меди от температуры можно определить по формуле:
R t
где R 0 — сопротивление при температуре 0°С; βCu — температурный коэффициент меди, равный 4,28-10-3 1/1 °С.
Рабочий ток в преобразователе термометра сопротивления обычно не превышает 10… 15 мА. Начальное сопротивление (при 0°С) таких преобразователей составляет 50 Ом, реже — 100 Ом. При подобных параметрах теплота, выделяемая током в промышленных термометрах сопротивления, не отражается на точности измерения.
В платиновых термометрах сопротивления применяется проволока без изоляции, наматываемая на каркас из слюдяных пластан: в медных термометрах сопротивления используется проволока, изолированная эмалью или шелком, которая наматывается на каркас из пластмассы либо керамики. В последнее время иногда в качестве преобразователей термометров сопротивления применяют полупроводниковые термосопротивления, имеющие отрицательный температурный коэффициент сопротивления порядка 0,03…0,04 1/1°С, что обеспечивает чувствительность преобразователя в 8… 10 раз большую, чем чувствительность преобразователя из металлической проволоки. Эти терморезисторы отличаются малыми размерами и большим сопротивлением (от 1000 до 200 000 Ом).
Они пригодны для работы в диапазоне температур от-100 до+120 °С.
Недостатком полупроводниковых терморезисторов является заметная неидентичность их характеристик, что требует подгонки температурного коэффициента каждого из них к заданному значению путем последовательного или параллельного присоединения к нему сопротивления из манганина. Это ограничивает возможность широкого использования полупроводниковых терморезисторов для измерений температуры.
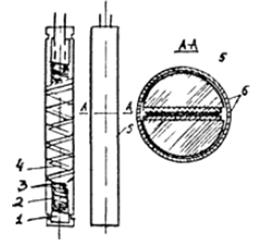 |
Рис. 12 Устройство платинового термосопротивления
 Неизолированная платиновая проволока 2 диаметром 0,07 мм, намотана бифилярно на каркас из слюды 1. К концам обмотки приварены выводы из толстой проволоки или ленты. Каркас с обмоткой зажат между двумя широкими пластинами 3, служащими для изоляции проволоки преобразователя. Пакет из слюдяных пластин скреплен серебряной лентой 4 и вставлен в алюминиевый цилиндрический цоколь 5, защищающий обмотку преобразователя от механических повреждений.
Неизолированная платиновая проволока 2 диаметром 0,07 мм, намотана бифилярно на каркас из слюды 1. К концам обмотки приварены выводы из толстой проволоки или ленты. Каркас с обмоткой зажат между двумя широкими пластинами 3, служащими для изоляции проволоки преобразователя. Пакет из слюдяных пластин скреплен серебряной лентой 4 и вставлен в алюминиевый цилиндрический цоколь 5, защищающий обмотку преобразователя от механических повреждений.
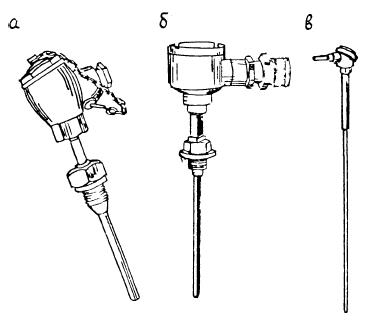
Рис.13 Общий вид термометров сопротивления: а – ТСП-175; б – ТСП-972; в – ТСП-0063.
Сигнализатор типа CBК-3М представляет собой автоматический непрерывно действующий прибор. Принцип действия прибора основан на определении теплового эффекта сгорания горючих газов и паров на поверхности чувствительных элементов, выполненных в виде цилиндров из оксидов алюминия, внутри которых установлена платиновая нить.
При появлении горючих газов в воздухе контролируемого помещения на рабочем чувствительном элементе R 1 происходит окисление горючего газа, при этом повышается температура элемента, и электрическое сопротивление платиновой спирали увеличивается. Нарушается условие равновесия измерительного моста и в измерительной диагонали моста возникает разность потенциалов, пропорциональная объёмной концентрации горючего газа.
Устройство датчика сигнализатора типа СВК-3М показано на рис. 14
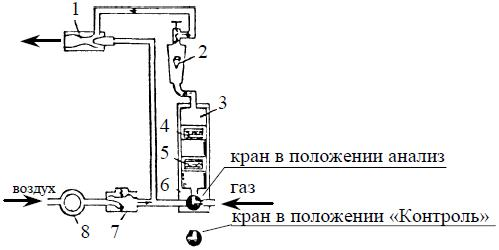
Рис. 14 Устройство датчика сигнализатора типа СВК – 3М:
Эжектор 1, запитанный давлением сжатого воздуха через фильтр 8 и
редуктор 7, под действием разряжения пропускает через датчик 3 анализируемый газ, расход которого контролируется ротаметром 2. Двухходовой кран 6 переключается в два положения: «анализ», при котором контролируется загазованность помещения, и «контроль», при котором производится проверка нуля прибора по воздуху.
2.6. Термоэлектрические преобразователи
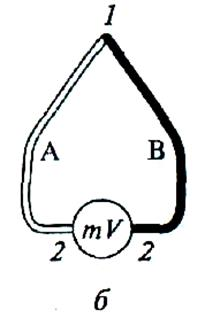
Термоэлектрическим преобразователем является термопара, представляющая собой два проводника А и В (рис. 15, а) из разнородных материалов, соединенных между собой в точке 7 (рабочий конец термопары — «горячий спай») и точке 2 (свободный конец термопары — «холодный спай»).
Если изменять температуру одной из этих точек, то в цепи появится термоЭДС, являющаяся разностью функций температур мест соединения проводников:
E AB
Если поддерживать температуру одной точки соединения постоянной, например точки 2, то
EAB
Последнее выражение и положено в основу измерения температуры с помощью термопар.
Измерение термоЭДС производится либо милливольтметром (рис. 15, б), либо компенсатором. Точка соединения 1 называется рабочим концом термопары, а точки соединения 2 — свободными концами термопары. Милливольтметр с данной термопарой образует термоэлектрический термометр.
Градуировка такого термометра производится при температуре свободных концов, равной 0°С. При практическом использовании термометра температура свободных концов обычно выше нуля, что вызывает погрешность измерения: прибор показывает несколько меньшую по сравнению с действительной температуру. Введение поправки на температуру свободных концов сводится к тому, что к показаниям прибора прибавляют температуру свободных концов.
Удлинительные термоэлектроды.
Термопара обычно помещается в жесткую защитную арматуру (от химического воздействия испытуемой среды и от механических повреждений) поэтому приходится надставлять ее гибкими термоэлектродами, присоединяя их, с одной стороны, к коробке зажимов термопары, а с другой — к проводам, идущим к милливольтметру. Такие термоэлектроды часто называют компенсационными проводами, однако это название не является точным, так как эти термоэлектроды ничего не компенсируют.
|
Наименование термопары |
ТермоЭДС при 100°С (t 0 = 0°C), мВ |
Верхний предел измеряемой температуры, °С |
|
|
при длительном применении |
при кратковременном применении |
||
|
Платинородий (90% Pt + 10% Ph) – платина |
0,64 |
1400 |
1600 |
|
Медь – копель (56% Cu + 44%Ni) |
4,75 |
350 |
500 |
|
Железо — копель |
5,75 |
600 |
800 |
|
Хромель (90% Ni + 10% Cr) — копель |
6,90 |
600 |
800 |
|
Хромель – алюмель (94,83% Ni + 2% Al + 2% Mn + 1% Si + 0,17% Fe) |
4,10 |
1100 |
1250 |
Характеристики наиболее распространенных термопар приведены в табл. 5.1.
Характеристика платинородий-платиновой термопары не является линейной: при температуре 1600 °С эта термопара развивает термоЭДС, равную 16,76 мВ. Характеристики остальных термопар практически линейны.
|
|
|
|
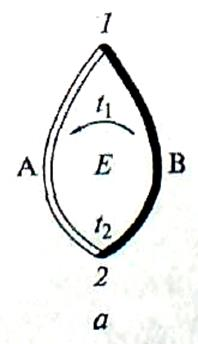
Рис. 15 Принцип действия термоэлектрического преобразователя (термопары):
2.7. Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи применяются для измерения: силы, давления, перемещения и количества вещества
Принцип действия пьезоэлектрических измерительных преобразователей основан на пьезоэлектрическом эффекте, т. е. возникновении электрических зарядов на поверхности некоторых кристаллических диэлектриков под действием механических сил или деформаций. При этом различают прямой и обратный пьезоэлектрические эффекты.
Прямой пьезоэлектрический эффект, Обратный пъезоэффект, Под сегнетоэлектриками
Кварц. Для измерений наибольшее применение получил кварц, у которого пьезоэлектрические свойства сочетаются с высокими механической прочностью и изоляционными качествами, а также независимостью пьезоэлектрической характеристики от температуры в широких пределах.
На рис. 16 показано расположение осей симметрии в кристаллах кварца: схема кристалла в изометрии (а); вид на кристалл сверху (б).
В кристаллах кварца различают следующие главные оси: продольная ось Z — Z , называемая оптической осью; ось X — X , проходящая через ребра шестигранной призмы перпендикулярно оптической оси, — электрическая ось; ось Y — Y , перпендикулярная граням, — нейтральная, или механическая ось.
Если из кристалла кварца вырезать параллелепипед таким образом, чтобы его грани а, b , с были параллельны электрической оптической и механической осям, то под влиянием сил, действующих перпендикулярно оптической оси, кристалл электризуется, причем заряды появляются на плоскостях, перпендикулярных электрической оси. При действии силы, направленной вдоль оптической оси, электризации кварца наблюдаться не будет.
Если на параллелепипед действует сжимающая сила Fx вдоль оси Х(продольный пьезоэффект —1), то вектор поляризации будет направлен по оси X . При этом интенсивность поляризации П будет пропорциональна деформации или в пределах упругих деформаций — давлению: П = d 1 px = dl ( Fx / sx ), где d 1 — постоянный коэффициент, называемый пьезоэлектрической постоянной, или пьезоэлектрическим модулем; рх , Fx — давление и сила, действующие на площадь грани bc; sх — площадь грани bc . Тогда заряд q , возникающий на каждой из граней, перпендикулярных электрической оси X , согласно определению интенсивности поляризации можно рассчитать по формуле: q = П sx , или q = d 1 Fx .
Уравнения показывают, что величина зарядов, возникающих на гранях b с, при действии силы, направленной вдоль электрической оси, не зависит от геометрических размеров кристалла. Заряды, появляющиеся на гранях b с при сжатии кварца силой, направленной вдоль электрической оси, будут иметь противоположные знаки по сравнению с зарядами, возникающими на них при растяжении.
F r
Значение пьезоэлектрической постоянной кварца
d 1 = 2,1*10-12 Кл/Н = 2,1*10-11 Кл/кг.
Пьезоэлектрическая постоянная кварца d 1 практически не зависит от температуры в диапазоне от 0 до 470…500 °С.
Титанат бария. Он используется в качестве пьезоэлектрика и выполняется в виде керамики. Однако для того чтобы керамика титаната бария получила пьезоэлектрические свойства, ее надо поляризовать, т.е. подвергнуть воздействию постоянного электрического поля напряженностью от 20 до 30 кВ/см в течение примерно трех часов. Поляризацию керамики титаната бария производят обычно в направлении оси Z (риc. 17).
Необходимо учитывать изменение свойств керамики титаната бария во времени, т. е. его старение.
В течение двух лет он снижает свои полезные качества примерно на 20 %.
Если механическая сила F действует по оси поляризации П, то заряды возникают на гранях, перпендикулярных направлению поляризации. При этом пьезоэлектрический модуль d 1 = 107*10-12 Кл/Н, т.е. он примерно в 50 раз больше, чем У кварца. Диэлектрическая проницаемость е = 1240*10-11 Ф/м, т.е. она примерно в 350 раз больше, чем у кварца.
Пьезоэлементы из керамики титаната бария обладают высокой механической прочностью, и на ее свойства не влияет влага. На практике большое значение имеет зависимость параметров керамики титаната бария от температуры. При температурах примерно -80, +10 и +120 °С титанат бария переходит из одной кристаллической структуры в другую, следовательно при этих температурах параметры (свойства) титаната бария претерпевают резкие изменения. Поэтому пьезоэлектрическая постоянная мало изменяется лишь в сравнительно узком температурном диапазоне: от -80 до 0 °С и от 15 до 100 °С.
Несколько лучшими температурными свойствами обладает титанат бария с присадкой титаната кальция (СаТiO 3 ) или титаната свинца (PbTiO3 ).
Например, присадка к титанату бария 12%-го титаната свинца позволяет сдвинуть точку структурного перехода от 120 до 180 °С.
Рис. 16 Расположение осей симметрии в кристаллах кварца:
а — схема кристалла в изометрии; б — вид на кристалл сверху; 1 — продольный пьезоэффект; 2 — поперечный пьезоэффект
 |
Рис. 1 7 Поляризация
титаната бария
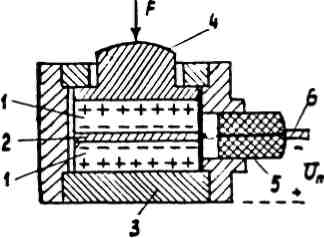
Рис. 18 Схема устройства пьезоэлектрического преобразователя
Преобразователь состоит: из двух пьезопластинок 1, расположенных так, чтобы их обращенные друг к другу грани имели заряды одного знака; из металлической прокладки 2; основания 3; нажимного устройства 4; изолятора 5; вывода 6. Под действием измеряемой силы F пьезопластины будут сжаты и на выводе 6 появится отрицательный потенциал, а на основании 3 положительный; отрицательный потенциал подается на сетку усилительной лампы.
Пример использования пьезоэлектрического преобразователя для измерения давления. Устройство пьезоэлектрического манометра для измерения давления в цилиндре двигателя внутреннего сгорания показано на рис. 19
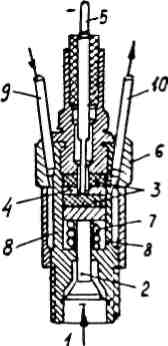 |
Рис. 19 Пьезоэлектрический манометр для измерения давления в цилиндрах двигателей внутреннего сгорания
Преобразователь ввёртывается в цилиндр как запальная свеча. Газы через уплотнительную мембрану 1 давят на шток 2, который передаёт давление на пьезопластинки 3, разделённые металлической прокладкой 4. К прокладке 4 приварен изолированный вывод 5, вторым выводом служит корпус преобразователя 6. Пружина 7 поднимает пьезопластину, создавая постоянное давление. Это даёт возможность преобразователю реагировать не только на повышение давления перед мембраной 1, но и на разряжение в объёме испытываемого цилиндра. При разряжении давление пружины уменьшается, и разность потенциалов на выходе также уменьшается.
В рассмотренном преобразователе предусмотрено водяное охлаждение корпуса. Через трубку 9 и 10 вода подается в рубашку корпуса 8.
Литература
[Электронный ресурс]//URL: https://inzhpro.ru/kursovaya/yi-elektricheskie-izmereniya/
1. Фремке А. В. , Душин Е. М. Электрические измерения. – Л.: Энергия, 1980.
2. Фарзане Н. Г. и др. Технологические измерения и приборы. – М.: Высшая школа, 1989.
3. Жарковский Б. И. Приборы автоматического контроля и регулирования. – М.: Высшая школа, 1989.
4. Сацукевич М. Ф. Измерительные приборы и их использование. – Минск.: Беларусь, I987.
5. Котур B. М. и др. Электрические измерения и электроизмерительные приборы. – М.: Энергоатомиздат, 1986.