
Системы связи являются наиболее распространенным вариантом радиоэлектронных систем передачи информации. Такие системы в УКВ-диапазоне включают в себя источники и получателей сообщений, а также канал, который, в свою очередь, подразделяется на аппаратуру (технические средства) и радиолинию, состоящую из среды распространения радиоволн, радиосигналов и помех. Радиолиния чаще оказывается значительно сложнее, в своем составе содержит радиоэлектронную аппаратуру, например ретрансляторы радиорелейных линии (РРЛ), которыми могут являться базовые станции систем связи подвижной службы.
Каналу связи, в зависимости от вида передаваемых сообщений, присваивается название: телефонный; телеграфный; передачи данных; телевизионный и др.
Главными признаками, по которым классифицируются системы передачи информации, являются:
- вид передаваемых сообщений (речь;
- телеграфные сообщения;
- данные;
- телевидение;
- факсимильная передача неподвижных сообщений;
- телеметрия;
- команды и т.п.);
- число каналов (одно- и многоканальные);
- пропускная способность (емкость идеального канала связи, определяемая формулой Шеннона)
C = W log 2 (1 + с/ш),
где С — пропускная способность канала в двоичных единицах в секунду (бит/с); W — ширина полосы частот (Гц); с/ш — отношение сигнал/шум по мощности, при этом для W = 3 000 Гц, с/ш = 10 3 (4 дБ); С = 4 000 бит/с. Можно показать, что по каналу с полосой W можно передать не более 2W дискретных значений сигнала в секунду;
- режим использования — двусторонняя радиосвязь (симплексная — поочередная передача-прием для телефонии и телеграфии;
- дуплексная — одовременные прием-передача;
- полудуплексная), односто-ронняя радиосвязь;
- тип радиоканала (спутниковая радиосвязь, наземная радиосвязь, включая тропосферную, ионосферную, метеорную и радиорелейную радиосвязь);
- вид информации (непрерывная, дискретная — импульсная, цифровая);
- дальность действия и требования к точности и помехоустойчивости.
Систему, обеспечивающую передачу информации между двумя пунктами, можно назвать «единичной». Для совокупности таких систем применяют термин «сеть». Термин «система» применяется также в смысле назначения (система связи в гражданской авиации, на железнодорожном транспорте, системы связи подвижной службы общего пользования и т.д.).
Автоматизированная система обработки информации на примере системы ...
... систему видеонаблюдения (далее по тексту – СВ) как автоматизированную систему обработки информации Объектом исследования является анализ автоматизированной системы обработки информации – системы ... система видеонаблюдения Тенденция развития цифровых технологий никогда не сможет полностью вытеснить аналоговую аппаратуру, равно, как цифровая фотография не заменит фотопечать. Конечно, передача ...
Этот же термин служит для объединенного наименования направлений радиотехнических систем передачи информации (радиосистемы передачи, проводные системы передачи, радиорелейные системы передачи, телекоммуникационные и т.п.).
Реальные сети содержат тысячи источников и потребителей информации и имеют сложную иерархическую структуру (маги-стральные, зоновые, местные сети, первичные и вторичные и т.п.).
В состав сети, помимо абонентских пунктов, входят узлы связи, в которых распределяется информация между абонентами (базовые станции, коммутационные и центральные коммутационные пункты и др.).
Наибольшее распространение в последние десятилетия получили системы мобильной связи: мобильные телефоны, пейджинговая и спутниковая связи и т.п.
УКВ- и СВЧ-системы радиосвязи
Подобные системы предназначены для эпизодического контроля за движением и состоянием автомобильного, железнодорожного, морского или воздушного транспорта, оповещения о метеоусловиях, уточнения обстановки и положения средств передвижения. В них предусматривается передача речевой информации, что требует на ВЧ свободной от сильных помех полосы частот около 5 кГц и значительной мощности передатчиков.
С целью повышения помехоустойчивости при значительных дальностях до 1999 г. использовался прием на слух телеграфных сигналов кодом Морзе. При этом скорость передачи составляет всего 1…2 Бод, но вместе с тем, возможен был прием сообщений при очень большом уровне помех и при использовании простой аппаратуры. Принцип действия при приеме на слух телеграфного кода иллюстрируется функциональной схемой рис. 1, а, где 3ГМ — задающий генератор и модулятор; УМ — усилитель мощности; АП — антенный переключатель; Тлф, Мкф, Тлг — телефон, микрофон, телеграфный ключ у оператора; Кл — ключ перехода с приема на передачу; СМ1 и СМ2 — смесители; УВЧ и УПЧ — усилители ВЧ (f so ) и ПЧ(fпч ); Г1 и Г2 — гетеродины частот fг1 и f г2 (Г1 перестраивается в широких пределах), fб — частота биений (ширина спектра около 5 Гц при скорости 50 — 60 знаков в минуту, поэтому сигнал на частоте биений Sб не может быть изображенным на рис. 1, б), Ап1, Аni — мешающие сигналы, в условиях которых ведется прием.
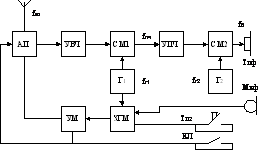
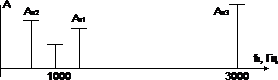
а б
Рис. 1
При радиочастотных посылках на частоте f so в телефоны подаются посылки на частоте fб = fпч — fг2 » 1 000 Гц. На частотах 600 — 1 200 Гц ухо очень чувствительно и если тон «чистый», т.е. не размыт паразитной модуляцией и имеется возможность подстройки с точностью 10 — 20 Гц, то опытный оператор может принимать телеграфные сигналы в условиях, когда соизмеримые по мощности и более мощные сигналы действуют на частотах, отличающихся всего на 50 — 100 Гц.
Такие системы должны работать в широком диапазоне частот, примерно 2 — 4 МГц, так как рабочие частоты могут быть разные в зависимости от условий прохождения сигнала, поэтому в приемнике и передатчике необходимо предусмотреть перестройку частоты. Здесь применялись стационарные передатчики значительной мощности (до 1 000 и более Вт) и имели громоздкие антенны, что облегчало прием сигнала подвижными объектами.
Проектирование локальной вычислительной сети управления систем ...
... вычислительных сетей: 1. передача файлов; 2. совместное использование и распределение ресурсов; 3. электронная почта и системы обмена мгновенными сообщениями; 4. координация совместной работы. При совместном ... с каждым годом. Интернет обеспечивает функции связи, помогает осуществлять банковские операции, возможно создание VPN соединений и т.д. Наибольший интерес пользователи традиционно выказывают ...
Принцип действия, вопрос помехоустойчивости и методы модуляции в таких системах в основном разработаны в середине прошлого века и длительное время не подвергаются существенным изменениям. Проектирование новых вариантов систем ведется путем построения мобильных систем, работающих в импульсных режимах.
Радиорелейные линии (РРЛ)
Известно, что УКВ- и СВЧ-диапазоны пригодны для радиосвязи на расстоянии, лишь незначительно превышающем расстояние прямой видимости, поэтому уверенная передача информации осуществляется посредством ретрансляции сигналов через различные РРЛ.
РРЛ — это цепочки приемно-передающих радиостанций, часто действующих автоматически, которые устанавливаются между оконечными пунктами передачи и приема.
Благодаря использованию остронаправленных антенн получают достаточное превышение уровня сигнала над уровнем помех при передаче мощности всего единиц и даже долей ватта, но важным остается обеспечение прямой видимости между антеннами РРЛ, что достигается их расположением на высоких башнях (h = 60 и более метров) на расстоянии 40 — 60 км друг от друга.
Для предотвращения одновременного приема сигналов нескольких станций промежуточные станции располагают так, чтобы трасса радиолинии представляла собой ломаную линию, при этом используются антенны с высокой направленностью.
Применяются следующие виды радиорелейной (РР) связи:
- пассивная ретрансляция;
- прямая ретрансляция с прямым усилением;
- ретрансляция со сдвигом несущей частоты;
- ретрансляция по промежуточной частоте;
- ретрансляция по видеочастоте.
Способ пассивной ретрансляции состоит в использовании специальной отражающей поверхности, которая переотражает сигнал в направлении на следующую РРС или соответствующего корреспондента. Такой способ применяется лишь при сравнительно небольшой протяженности трассы, а также для переизлучения в нужном направлении энергии передатчика (например, расположенного в основании мачты, вместо соединения его с антенной фидерной линией).
Прямая ретрансляция (или ретрансляция с прямым усилением) не требует каких-либо преобразователей входного сигнала (способ прост, удобен, искажения незначительны).
Однако имеется ряд ограничений:
- на СВЧ трудно получить достаточно большое усиление входного сигнала (сейчас с успехом работают ЛБВ);
- величина коэффициента усиления ограничена влиянием обратной связи между передающей и приемной антеннами (при К п большем затухания между антеннами РР станция возбуждается).
По этим причинам такая связь используется при небольших расстояниях между РРС (для снижения К п ).
Для предотвращения самовозбуждения РРС применяют ретрансляцию со сдвигом частоты. В этом случае принимаемый сигнал f 1 усиливается, затем преобразуется (сдвигается на несколько десятков мегагерц) f2 = f1 + Df и усиливается до требуемого уровня на f2 . Такой способ наиболее приемлем и оказывается весьма эффективным при использовании ЛБВ (рис. 2).
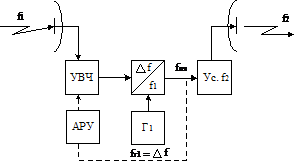
Рис. 2
В ряде частотных диапазонов из-за отсутствия эффективных электронных приборов (типа ЛБВ) применяют РРС с ретрансляцией по промежуточной частоте. Здесь входной сигнал, с помощью местного СВЧ-гетеродина, преобразуется в ПЧ, на которой идет усиление. Для предотвращения самовозбудения РРС и влияния нестабильности местного СВЧ-гетеродина (который используется как в приемном, так и в передающем каналах) прибегают к дополнительному преобразованию частоты и осуществляют дополнительное усиление по этой частоте (рис. 3).
Такой метод позволяет избавиться от влияния нестабильности гетеродина, а отличие f вых от fвх на малую частоту fcд и его стабильности (гетеродина fcд ) не могут существенно отразиться на частоте излучаемого fвых .
Практически стабильность частоты выходного сигнала зависит только от стабильности частоты первого передатчика всей радиолинии.
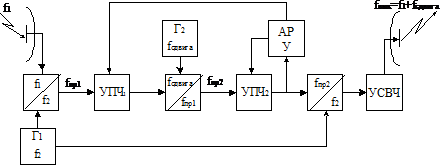
Рис. 3
Ретрансляция по видеочастоте представляет собой комбинацию обычного телевизионного приемника и передатчика. Такая РРС имеет громоздкую и сложную аппаратуру и сегодня признана малонадежной и неустойчивой. Усложнение тракта, а также модуляция и демодуляция сигнала на каждой РРС затрудняет получение хороших характеристик канала, вызывает рост шума и колебания уровня сигнала. По этим причинам способ распространения не получил.
РРЛ — громоздкие и дорогие сооружения (из десятков проме-жуточных РРС) и используются для передачи ТВ, телефонных, телеграфных и др. сигналов, обладают широкой полосой частот — сотни и тысячи МГц. Относительные полосы сигналов незначительны, даже если по РРЛ передавать уплотненные сигналы многоканальной телефонии (содержащей сотни и тысячи телефонных разговоров).
Поэтому здесь нет необходимости применять наиболее экономичную по полосе частот (спектра) АМ. Чаще используется ЧМ, обеспечивающая большую помехоустойчивость и линейность характеристик тракта.
РРЛ, как правило, делают двухстороннего действия (дуплек-сные), при этом промежуточные РРС ведут одновременно прием и передачу в оба направления.
В РРЛ с большим объемом передаваемой информации устанавливаются несколько компонентов оборудования, работающих на различных частотах. Это позволяет организовать несколько высокочастотных стволов линии, работающих на общую антенну. Применяется двухчастотная и четырехчастотная системы распределения частот.
РРС разделяются на оконечные, промежуточные и узловые. Оконечные располагаются обычно непосредственно в телецентрах (сюда же подводят кабели телефонной связи).
Промежуточные — обычно автоматизированные, управляемые с оконечных и узловых РРС. Узловые станции, в отличие от промежуточных, предназначены для ответвления стволов, выделения и введения телефонных каналов и ТВ-программ. (Располагаются в крупных населенных пунктах и имеют обслуживающий персонал.)
Существующие РРС можно подразделить на системы средней и большой мощности:
- средней мощности системы Р-60/120 (одна из первых РРС в СССР 1953 г.), ГТ-8000/40 (ВНР), ФХ-686 (Франция) и ФМ-40/ТВ-11000 (ГДР) (передача ТВ и многоканальной телефонии 60 или 40 каналов) для республиканских и областных сетей;
— большой мощности — Р-6000 (Р-600М, Р-6002М, Р-6002МВ) и близкую к ней по структуре и качественным показателям ГТТ-4000/600, а также системы «Восход» и «Дружба». Такие системы (Р-6000) предназначены для магистральных линий связи с протяженностью до 5000 км. Диапазон частот 3,4 — 3,9 ГГц. Система имеет пять рабочих дуплексных стволов, два ствола служебной связи, один ствол горячего резерва. Системы «Восход» и «Дружба» предназначены для РР-связи протяженностью до 12 500 км. Диапазон — 3,4 -3,9 ГГц и второй — 5,67 — 6,17 ГГц. Позволяют организовать 6 — 8 широкополосных рабочих стволов. Рабочий ствол обеспечивает передачу сигналов черно-белого или цветного телевидения и четырех каналов звукового сопротивления (радиовещания) или передачу 1 920 телефонных разговоров.
Унифицированные радиорелейные системы разработаны на диапазоны 2, 4, 6, 8 ГГц (4, 6 ГГц — для магистральных систем, 2, 8 ГГц — для зоновых).
Принципы и методы формирования группового сигнала или уплотнения зависят от того, импульсными, непрерывными или дискретными являются исходные сигналы. При импульсных и дискретных сигналах используется временной принцип уплотнения группового сигнала и разделения каналов, при непрерывных сигналах — частотные уплотнения [2].
Частотное уплотнение
Очевидно, что если имеется n сообщений с одинаковым спектральным составом (например, телефонные сообщения со спектром 40 — 3 000 Гц), то их простое смешение приведет к полной потере информации. Следовательно их до передачи по РРЛ необходимо так преобразовать, чтобы каждое из них разместилось в «своем» участке спектра частот. Для этого можно использовать принцип модуляции поднесущего гармонического колебания. Понятно, что для каждого сигнала поднесущая «своя», причем спектры всех n сообщений не должны перекрываться.
Совокупность модулированных поднесущих образует групповой сигнал, используемый для модуляции несущей (излучаемой через антенну), которая и является переносчиком группового сообщения. При двухэтапной модуляции могут использоваться сочетания методов (например, АМ-АМ, АМ-ЧМ и т.д.).
Для эффективного использования диапазона частот из спектра модулированной поднесущей отфильтровывают одну боковую полосу. При этом в приемном устройстве должны быть восстановлены поднесущие (с помощью местного гетеродина).
Понятно, что функциональная схема той части многоканальной системы, в которой образуется групповой сигнал и затем в пункте приема разделяется и выделяются сообщения («каналообразующая аппаратура»), отличается значительной сложностью. Особенно существенно то, что для генерации сетки частот, выделения боковых полос, переноса спектра группового сигнала и других операций требуется большое число фильтров, к характеристикам которых предъявляются жесткие требования по точности и стабильности, поэтому аппаратура требует систематического обслуживания.
Число подканалов увеличивают соединением стандартных групп, содержащих по 12 телефонных каналов. Существующие системы характеризуются данными, сведенными в табл. 1.
Таблица 1
|
Канал |
Число каналов и групп |
Диапазон частот, кГц |
60 (5 групп) |
12…252 |
|
К120 |
120 (10 групп) |
60…552 |
||
|
К40 |
40 (25 групп) |
60…1 40 |
||
|
К1920 |
1 920 (160 групп) |
52…8 520 |
Очевидно, что чем больше сообщений передается по общему радиоканалу, тем шире спектр группового сигнала, а для получения заданного соотношения с/ш мощность передатчика должна увеличиваться в соответствующее число раз по сравнению с той, которая требуется при передаче одного из них.
Поверхностные волны на КВ имеют малое значение, поскольку рефракция выражена слабо (поле волны быстро затухает); рассеяние КВ в нижних участках тропосферы также заметно не проявляется.
Основными для КВ являются пространственные волны, отражаемые слоем F (R = 14 — 380 км).
Потери энергии КВ в ионосфере невелики, если правильно выбрать рабочую частоту. Поэтому здесь можно добиться уверенной связи практически на любые расстояния. Такие связи можно поддерживать с помощью сравнительно маломощных передатчиков.
В дневные часы (при больших R) применяют волны от 10 до 25 м (при максимальной ионизации в слое F), в ночные от 35 до 65 — 70 м (отсутствие поглощения в нижних слоях ионосферы (до h = 60 — 90 км — слой Д, исчезающий ночью), ионизация же верхних слоев ночью для этих длин волн достаточна).
Волны с l = 25 — 35 м применяются в сумеречное время, такое деление — явно условно и зависит от времени года, солнечной активности, географического положения лини радиосвязи (границы между данными поддиапазонами могут претерпевать изменения).
Для обеспечения космической связи выбирают диапазон волн, не поглощаемый в тропосфере и свободно проникающий через ионосферу.
Со стороны НЧ этот диапазон ограничен значениями максимально применимой частоты для наземных станций. Среднее значение нижней границы диапазона при радиосвязях с ИСЗ составляет около 10 МГц, которое в период повышенной солнечной активности может достигать 80 — 100 МГц для средней полосы и снижается до 2 МГц для полярных районов в период полярных ночей.
Со стороны ВЧ-диапазона — волны не короче 3 см, чтобы избежать потерь в тропосфере. Однако имеются окна прозрачности и в оптическом диапазоне, потому и этот диапазон представляется перспективным.
При радиосвязи с орбитальными ИСЗ обычно используют КВ (~20 МГц), метровые (~14 — 150 МГц), далее дециметровые и сантиметровые, вплоть до 5 см.
При прохождении через ионосферу происходит вращение плоскости поляризации радиоволн. При использовании на передающей и приемной сторонах антенн для плоско-поляризованных волн из-за этого явления возникают дополнительные потери энергии. Для борьбы с ними на частотах до 7 000 МГц применяют антенны с круговой поляризацией на обеих сторонах лини связи. Выше этой частоты с такими потерями можно не считаться.
При осуществлении радиосвязи между космическими аппаратами наиболее приемлемы миллиметровые и оптические диапазоны длин волн.
Оптические ретрансляторы
В оптических системах, как и в РРЛ, ретрансляция обеспечивает усиление сигнала и дополнительно (при цифровой передаче) может восстанавливать форму импульсов, уменьшать уровень шумов и устранять ошибки (такой ретранслятор называется регенеpaтopoм).
По методу усиления оптического сигнала ретрансляторы подразделяются на повторители и оптические усилители.
Ретрансляторы детектируют оптические сигналы, преобразуют их в электронные сигналы, отделяют от них шумы и вновь ретранслируют в виде оптических сигналов, обычно с использованием электронных устройств.
Повторители занимают некоторое промежуточное положение между оптическими усилителями и регенераторами. С приходом полностью оптических усилителей использование повторителей в оптических сетях перестало быть повсеместным.
Электронно-оптический повторитель сначала преобразует оптический сигнал в электрическую форму, усиливает, корректирует, а затем преобразует обратно в оптический сигнал.
Можно представить повторитель как последовательно соединен-ные приемный и передающий оптические модули. Аналоговый повторитель, в основном, выполняет функцию усиления сигнала и вместе с полезным сигналом усиливает входной шум. При цифровой передаче повторитель вместе с функцией усиления выполняет функцию регенерации сигнала, поэтому блок регенерации содержит цепь принятия решения и таймер.
В блоке регенерации восстанавливается прямоугольная форма импульсов, устраняется шум, ресинхронизируется передача так, чтобы выходные импульсы попадали в соответствующие тайм-слоты.
В локальных волоконно-оптических системах связи (ВОСС) повторители (в качестве ретрансляторов) распространены больше, чем оптические усилители, хотя при построении оптических магистралей оптические усилители незаменимы.
Традиционные ВОСС используют повторители-регенераторы, повышающие мощность сигнала (рис. 4).
Хотя такие системы работают хорошо, они являются весьма дорогими и не позволяют наращивать пропускную способность линии.

Рис. 4
Потери мощности в линии чаще компенсируются оптическим усилением на активном волокне, так называемые эрбиевы усилители (Erbium-Doped Fiber Amplifier — EDFA).
Такое «прозрачное» усиление не привязано к битовой скорости сигнала, что позволяет передавать информацию на более высоких скоростях и наращивать пропускную способность до тех пор, пока не начнут влиять хроматическая и поляризационная модовая дисперсии. Усилители EDFA также способны усиливать многоканальный сигнал, добавляя еще одно измерение в пропускную емкость. Оптический усилитель этого типа наиболее широко распространен и является основным элементом в технологии полностью оптических сетей, поскольку он позволяет усиливать сигнал в широком спектральном диапазоне.
На рис. 5 приведена схема такого усилителя, в которой слабый входной оптический сигнал (1) проходит через оптический изолятор (2), пропускающий свет в прямом направлении (слева направо), но не пропускающий рассеянный свет в обратном направлении, далее проходит через блок фильтров (3), которые блокируют световой поток на длине волны накачки, но прозрачны к длине волны сигнала. Затем сигнал попадает в катушку с волокном, легированным примесью из редкоземельных элементов (4).
Длина такого участка волокна составляет несколько метров. Этот участок волокна подвергается сильному непрерывному излучению полупроводникового лазера (5), установленного с противоположной стороны, с более короткой длиной волны накачки. Свет от лазера накачки — волна накачки (6) — возбуждает атомы примесей.
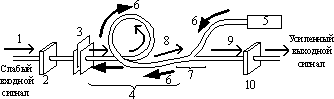
Рис. 5
Возбужденные состояния имеют большое время релаксации, чтобы спонтанно перейти в основное состояние. Однако при наличии слабого сигнала происходит индуцированный переход атомов примесей из возбужденного состояния в основное с излучением света на той же длине волны и с той же самой фазой, что и повлекший это сигнал. Селективный разветвитель (7) перенаправляет усиленный полезный сигнал (8) в выходное ОВ (9).
Дополнительный оптический изолятор на выходе (10) предотвращает попадание обратного рассеянного сигнала из выходного сегмента в активную область EDFA.
Активной средой EDFA является одномодовое волокно, сердцевина которого легируется примесями редкоземельных элементов с целью создания трехуровневой атомной системы.
Хотя оптический сигнал, генерируемый исходным лазерным передатчиком, имеет вполне определенную поляризацию, все остальные узлы на пути следования оптического сигнала, включая оптический приемник, должны проявлять слабую зависимость своих параметров от направления поляризации.
В этом смысле оптические усилители EDFA, характеризуясь слабой поляризационной зависимостью коэффициента усиления, имеют ощутимое преимущество перед полупроводниковыми усилителями.
Различают три типа усилителей, в зависимости от участков сети, на которых они располагаются. Для усиления сигнала перед тем, как он поступит в сеть, непосредственно за передатчиком устанавливаются постусилители. Для компенсации ослабления сигналов через каждые 80 — 100 км ВОЛС устанавливаются линейные усилители. Предусилители, назначением которых является усиление сигнала до уровня мощности в пределах чувствительности приемного устройства, размещаются непосредственно перед приемником (рис. 32).
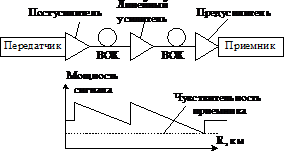
Рис. 6
Линейные усилители устанавливаются в промежуточных точках протяженных линий связи между регенераторами или на выходе оптических разветвителей с целью компенсации ослабления сигнала, которое происходит из-за затухания в оптическом волокне или из-за разветвления в оптических разветвителях, ответвителях, мультиплексорах. Линейные усилители заменяют оптоэлектронные повторители и регенераторы в тех случаях, когда нет необходимости в точном восстановлении формы сигнала.
Усилители мощности (бустеры) устанавливаются непосредственно после лазерных передатчиков и предназначены для дополнительного усиления сигнала до уровня, который не может быть достигнут на основе лазерного диода. Бустеры могут также устанавливаться перед оптическим разветвителем, например, при передаче нисходящего трафика в гибридных волоконно-коаксиальных системах кабельного телевидения.
В отличие от регенераторов, оптические усилители вносят дополнительный шум, который необходимо учитывать. Поэтому, наряду с коэффициентом усиления, одним из важных параметров EDFA является коэффициент шума.
Лучший способ получения устройства с низкошумящими характеристиками, как и в случае радиочастотных усилителей, состоит в использовании низкошумящего усилителя с большим усилением в первом каскаде и шумящего усилителя высокой мощности во втором каскаде. Первый каскад определяет также шумовую характеристику многокаскадного усилителя.
Предварительные усилители (предусилители) устанавливаются непосредственно перед приемником регенератора и способствуют увеличению отношения сигнал/шум на выходе электронного каскада усиления в оптоэлектронном приемнике. Оптические предусилители часто используются в качестве замены сложных и обычно дорогих когерентных оптических приемников.
Особенности лазерных атмосферных систем связи
В отличие от ВОСС лазерные атмосферные системы связи имеют значительное и труднопрогнозируемое затухание информационного сигнала на трассе, которое складывается из двух основных составляющих:
затухания за счет рассогласования источника излучения и его приемника;
затухания за счет поглощения и рассеивания оптического излучения в атмосфере.
Отметим их некоторые особенности.
Основным процессом, сопровождающим распространение инфракрасного (ИК) оптического излучения в атмосфере, является его селективное поглощение парами воды, углекислым газом, а также рассеяние мельчайшими частицами, находящимися во взвешенном состоянии в атмосфере. В диапазоне длин волн свыше 1 мкм и на высотах до 12 км наибольшее значение имеет селективное поглощение оптического излучения молекулами водяных паров и углекислого газа.
Концентрация водяных паров в атмосфере является переменной, зависящей от географического положения, высоты, времени года и т.п. С увеличением высоты содержание водяного пара в атмосфере резко уменьшается и на высоте свыше 12 км оно фактически равно нулю.
Сильные полосы поглощения ИК-излучения соответствуют примерно следующим длинам волн: 0,51; 0,7; 0,9; 1,16; 1,3 мкм и т.д. (более дальний оптический диапазон сегодня не используется).
Соответственно «окна прозрачности» (где коэффициент пропускания атмосферы τпр = τпр (λ)/τпр. max максимален и составляет 0,6…0,9) располагаются на длинах волн: 0,95; 1,15; 1,5…1,8 мкм.
Для расчета поглощения излучения водяным паром введено понятие «количество осажденной воды», измеряемое толщиной слоя воды (мм), которое получится, если осадить всю воду из оптической трассы с заданной толщиной слоя атмосферы по длине канала.
Кроме поглощения поток ИК-излучения рассеивается молекулами воздуха (молекулярное рассеяние) и различными частицами, взвешенными в воздухе: пыль, кристаллы солей, остатки продуктов сгорания, капли воды и кристаллы льда (аэрозольные рассеяния).
В то время как коэффициенты пропускания атмосферой монохроматического потока ИК-излучения с учетом молекулярного рассеяния могут быть рассчитаны достаточно точно, расчет коэффициента пропускания потока с учетом аэрозольного рассеяния с необходимой для практики точностью невозможен, так как для этого необходимо знать количество, размеры, форму и состав вещества аэрозольных частиц, на которых происходит рассеяние ИК-излучения. Кроме того, так как в качестве излучателя атмосферного передатчика могут использоваться некогерентные излучающие диоды, то, соответственно, и поток ИК-излучения не является в чистом виде монохроматическим.
Учитывая сказанное выше, рассеяние ИК-излучения в «окнах прозрачности» уточняют на основании экспериментальных исследований. Следует отметить, что в соответствии с теорией взаимодействия лучистого потока с частицами, взвешенными в воздухе, он обтекает частицы (т.е. не происходит рассеяния), если длина волны потока больше диаметра частицы. Другими словами, чем длиннее волна лучистого потока, тем меньше аэрозольное рассеяние. При расчетах коэффициента рассеяния τрас вводится понятие метеорологической дальности видимости Iмет , которая характеризует замутненность атмосферы и представляет собой наибольшую дальность видимости для темных предметов с угловыми размерами, большими 4, проектирующихся на фоне неба у горизонта. Значения коэффициента τрас при различных длинах волн и Iмет можно определить из справочников.
Туман и облака сильно рассеивают ИК-излучение; имеющиеся экспериментальные данные по прохождению ИК-излучения через туман и облака относятся к ИК-технике ночного видения, тепловидения и т.п. С другой стороны, при работе лазерных атмосферных систем связи затухание в облаках можно не учитывать, а туман (особенно в городских условиях) — явление эпизодическое. В условиях же дождя, снега, аэрозольной пыли (при правильно выбранной оптической мощности передатчика и чувствительности оптоэлектронного приемника) такие системы должны работать безотказно.
Космические системы радиосвязи
Успешная эксплуатация систем передачи информации «Земля-Земля» через активные спутники-ретрансляторы («Молния», «Экран», «Стационар» и др.) показала их высокую эффективность. Как и в наземных РРЛ, при ретрансляции сигнала через ИСЗ теоретически возможны два основных метода ретрансляции: пассивный и активный.
Пассивный космический ретранслятор представляет собой металлическое зеркало, отражающее передающие на него радиоволны. Однако доля отраженной энергии ничтожно мала и применимость таких систем реальна лишь при низких орбитах и для узкополосных сигналов.
Активные ретрансляторы на ИСЗ подобны рассмотренным выше и позволяют осуществлять телевизионные мосты между континентами, обеспечивать прием ТВ-программ в любом уголке страны.
РРС на ИСЗ работают в условиях, которые невозможны для наземных РРС: вибрации, удары и ускорение при запуске; отсутствие обслуживающего персонала в течение всего времени эксплуатации; ограничение габаритов, веса и мощности; наличие ионосферы; воздействие интенсивной радиации (при прохождении через радиационные полосы Земли); отсутствие воздуха, влаги, большие перепады температур.
Одним из первых ИСЗ является «Молния-1» (апогей — 40 000 км в Северном полушарии; перигей — 500 км в Южном; наклон орбиты 65О , период обращения 12 час).
При первом обороте (с юга на север пересечение на 60О восточной долготы и 120О западной долготы) апогей над центром Красноярского края обеспечивал одновременную связь Москва — Дальний Восток в течение примерно 9 часов, а при втором — на севере Гудзонова залива. Первая ТВ-связь Москва — Владивосток через ИСЗ «Молния-1» проведена 21.04.65 г.; передача велась методом временного уплотнения.
В США — первая трансляция ТВ через ИСЗ «Тельстар» осуществлена в 1962 г. (параметры орбиты — 5 645 км на 951 км), мощность Р = =2 Вт, полоса Df = 4,6 МГц, длительность сеанса с Европой — 20 минут за оборот.
На ИСЗ установлено две одинаковых параболических антенны: основная и резервная. Угол направленности антенн несколько превышает телесный угол, под которым видна Земля со спутника. В ходе сеанса связи основная антенна непрерывно ориентируется на центр Земли при помощи специального устройства слежения. Кроме указанной аппаратуры на ИСЗ имеются: командно-измерительный комплекс; системы ориентации и корректировки; корректировочная двигательная установка; программно-временное устройство; система коммутации; терморегуляторы и системы дозиметрии (рис. 7).
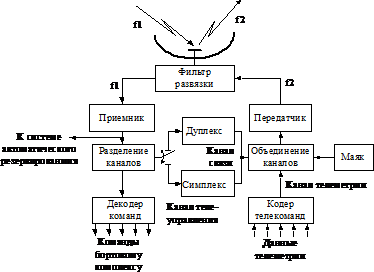
Рис. 7
В табл. 2 приведены существующие и прогнозируемые мощности передатчиков РРС на ЛБВ и транзисторах для перспективных малошумящих усилителей (для транзисторов применяется их параллельное включение 10 — 16 штук на общую нагрузку, увеличение их количества далее, эффекта не дает).
Таблица 2
|
G пер |
Допустимая мощность ИСЗ-ретранслятора (Вт), при Df, Гц |
|||||
|
10 3 |
10 4 |
10 5 |
10 6 |
10 7 |
10 8 |
|
|
100 |
0,1 |
0,25 |
2,5 |
25 |
250 |
2 500 |
|
1 000 |
0,01 |
0,025 |
0,25 |
2,5 |
25 |
250 |
Контроль состояния и работы всех систем спутника ведется специальной телеметрической аппаратурой. С помощью бортового и наземного командно-измерительных комплексов определяются траектория полета и параметры спутника. Этой же аппаратурой передаются команды, управляющие работой отдельных систем, что осуществляется бортовым программно-вычислительным устройством.
Надежность работы приемника-передатчика достигается использованием системы автоматического резервирования.
Усиленный сигнал идет в устройство разделения каналов по временному или частотному принципу. Далее связные каналы через устройство объединения каналов поступают непосредственно на бортовой передатчик, работающий в режиме ЧМ.
Команды управления после разделительного устройства декодируются и управляют работой соответствующих бортовых систем. Одна из команд включает бортовой передатчик для проведения сеанса связи или передачи телевизионной программы.
Аппаратура собственно ретранслятора, включаемого в канал связи, представляет собой ретранслятор (гетеродинного типа) без демодуляции приходящих сигналов. Ретранслятор рассчитан на работу в двух режимах: дуплексном (телефонном) и симплексном (телевидение).
В настоящее время лазерная техника открывает новые возможности для совершенствования систем связи, локации и радиоуправления. Эти возможности связаны с огромным коэффициентом усиления передающих оптических антенн, что позволяет получить большое отношение сигнал/шум в приемнике в широкой полосе частот при маломощных передатчиках и с возможностью использовать очень широкие полосы частот при передаче и приеме оптических сигналов.
Лазерные системы передачи информации имеют следующие преимущества по сравнению с радиосистемами.
1. Возможность передачи информации с очень высокой скоростью при относительно малой мощности передатчика и малых габаритных размерах антенны. Сегодня лазерные линии связи могут обеспечить передачу информации со скоростью до 102 Гбит/с и более. При временном уплотнении каналов можно в многоканальной линии связи получить результирующую частоту следования импульсов более 100 ГГц, что превышает всю полосу радиочастотного спектра, используемого сегодня.
2. Скрытность передачи информации и защищенность от организованных помех (из-за очень узких ДН передающих и приемных антенн, составляющих единицы угловых секунд).
Однако имеются и недостатки, основными из которых являются: зависимость работы от метеоусловий и необходимость использовать световоды (кварцевые, стеклянные волокна).
Реальные перспективы для лазерных систем связи открываются в системах космической связи «ИСЗ-ИСЗ» ввиду отсутствия атмосферы. В таких системах широкополосная и узкополосная информация от низкоорбитальных КА будет передаваться по лазерным линиям связи на стационарные ИСЗ и с них на наземные станции. Важное значение будут иметь спутниковые системы связи «Земля-Земля» через ИСЗ-ретранслятор с лазерными линиями связи.
Расчеты показывают, что в таком канале связи реализуема скорость передачи информации более 1 Мбит/с из района Марса. Для сравнения можно сказать, что в существующих телеметрических радиолиниях для связи с КА в районе Марса скорость передачи информации не превышает 10 бит/с.
Прежде чем обсуждать вопрос выбора системы для космической связи, оценим достоинства и недостатки используемых систем:
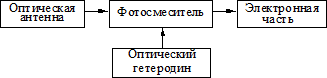
— с прямым детектированием (рис. 8, а);
— с гетеродинным приемником (рис. 8, б).
![]()
а
б
Рис. 8
Отметим, что помехоустойчивость обеих систем примерно одинакова и для одной и той же частоты и одинакового уровня развития лазерной техники имеются явные преимущества у первой системы, которые заключаются в
имеет более простое приемное устройство;
нечувствительна к доплеровскому сдвигу частоты, что исключает необходимость поиска сигнала по частоте в приемнике (как это имеет место во второй системе);
нечувствительна к искажению волнового фронта сигнала (возникающего в турбулентной атмосфере), поэтому возможны простые наземные антенны с большой апертурой. В гетеродинном приемнике турбулентность атмосферы ограничивает размеры приемной антенны и для ее увеличения (площади антенны) необходимо применять антенную решетку, состоящую из множества антенн с устройством сложения выходных сигналов;
имеет приемную антенну, к которой не предъявляются требования высокого оптического качества, что позволяет реализовать более легкие и дешевые бортовые антенны;
позволяет реализовать более эффективные методы взаимного наведения передающих и приемных антенн (по сравнению с одноэтапным растровым сканированием во второй системе).
Единственным преимуществом систем с гетеродинным приемником является более эффективное подавление фона в приемнике (по сравнению с первым).
частотной пригодности лазеров
Из-за большой дальности связи требуются передатчики со средней мощностью от долей до единиц ватт. Такие лазеры с приемлемым КПД имеются в трех основных диапазонах:
— 10 мкм — газовый лазер на СО2 с l = 10,6 мкм, в одномодовом режиме при Р = 1 Вт h = 10%, tраб = 10 тыс. ч. непрерывной работы (пригоден для бортовой аппаратуры и из-за высокой стабильности частоты вполне может работать в системе с гетеродинным приемником);
— 1 мкм — твердотельный лазер на итрий-алюминиевом гранате (ИАГ), активированном ниодимом (J-Al/Nd) l = 1,06 мкм, h= 1,5 — 2%, Рмакс = n×0,1 Вт (такой лазер может с успехом работать на стационарных ИСЗ, т.к. накачка осуществляется решетками светодиодов или устройствами солнечной накачки. В последнем случае коллектор солнечной энергии через оптический фильтр фокусирует энергию накачки на лазерном стержне, обеспечивая его возбуждение. Калий-рубидиевые лампы накачки обеспечивают tраб до 5 тыс. ч при h = 10%. Результирующий h = 10— Светодиоды имеют больший ресурс, но их мощность мала и поэтому они пригодны только для маломощных передатчиков до 0,1 Вт);
— 0,5 мкм — перспективным здесь является Nd:ИАГ-лазер, работающий в режиме удвоения частоты l = 0,53 мкм (ярко-зеленый цвет), с эффективностью преобразователя близкой к единице.
Для низкоскоростных лазерных линий связи перспективными являются импульсные газовые лазеры на парах металлов. В импульсном режиме лазер на парах меди имеет l = 0,5106 и 0,5782 мкм и h = =5% (в режиме модуляции добротности) при средней мощности единицы ватт.
Возможности приемной техники в этих трех диапазонах
— 10,6 мкм — имеются фотодетекторы с высокой квантовой эффективностью (h » 40 — 50%) при охлаждении до 77 — 100 К, но т.к. фотодетекторы не обладают внутренним усилением, они не пригодны для систем с прямым детектированием;
— 1,06 мкм — для систем с прямым детектированием можно использовать ФЭУ или лавинные фотодиоды. Но квантовая эффективность ФЭУ на этой длине волны составляет всего 0,008, поэтому этот диапазон значительно уступает первому;
— 0,53 мкм оказывается более приемлемым диапазоном в режиме прямого детектирования, т.к. показатели его из-за увеличения эффективности ФЭУ существенно выше.
Итак, имеются две системы космической связи:
— с прямым детектированием сигнала на длине волны 0,53 мкм;
с гетеродинным приемником в ИК-диапазоне на 10,6 мкм.
Причем система с l = 10,6 мкм имеет:
более низкий уровень квантового шума (т.к. спектральная плотность квантового шума пропорциональна величине hf, то на l = =10,6 мкм она в 20 раз меньше, чем на l = 0,53 мкм);
— КПД лазерного передатчика диапазона l =10,6 мкм выше, чем на l = 0,53 мкм.
Недостатки здесь те же, что и у гетеродинного метода.
Система видимого диапазона l = 0,53 мкм, имея более высокий уровень квантового шума, более низкий КПД передатчика, может иметь значительно уменьшенные ДН передающей антенны. Так, если апертуры передающих антенн одинаковы (на l = 0,53 и 10,6 мкм), то передающая антенна на l = 0,53 мкм будет иметь коэффициент усиления в 400 раз больший, чем на l = 10,6 мкм, что с запасом компенсирует названные выше недостатки. Более узкие лучи передающих антенн усложняют систему взаимного наведения передающих и приемных антенн, однако использование эффективных многоэтапных методов поиска позволяет существенно сократить время вхождения в связь. Причем в гетеродинном приемнике возможно только простое растровое сканирование при поиске сигнала и время поиска существенно увеличивается за счет необходимости одновременного поиска сигнала по частоте.
Важным преимуществом антенны видимого диапазона является возможность построения спутниковой системы связи многостанционного доступа. В этом случае на борту ИСЗ-РРС размещаются несколько (по числу линий связи) простых приемников прямого детектирования. Для систем диапазона 10,6 мкм это практически невыполнимо из-за сложности гетеродинных приемников с громоздкими устройствами охлаждения фотосмесителей.
Таким образом, по существующему техническому уровню системы с прямым детектированием (l = 0,53 мкм) имеют существенные преимущества:
— для дальней космической связи «КА-Земля» через атмосферу;
— для спутниковой системы с многостанционным доступом.
Для спутниковой системы связи, когда приемный (или передающий) луч ИСЗ-ретранслятора «перекидывается» с одного абонента на другой по программе, система связи с высокой пропускной способностью на l = 0,53 и 10,6 мкм имеют сравнимые характеристики при скоростях передачи информации до нескольких сотен мегабит в секунду. Более высокие скорости передачи информации (более 10 Гбит/с) в системе с l = 10,6 мкм трудно реализуемы, в то время как в видимом диапазоне они могут быть просто обеспечены за счет временного уплотнения каналов.
Пример реализации системы связи трех синхронных спутников (рис. 9):
— длина волны передатчика l = 0,53 мкм (детектирование прямое);
— модуляция осуществляется электрооптическим модулятором, а сигналом модуляции является СВЧ-поднесущая с центральной частотой nm = 3 ГГц и боковой полосой от nмин = 2,5·109 до nмакс = 3,5·109 Гц (т.е. Dn = 109 Гц);
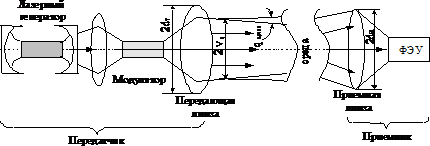
Рис. 9
— электрооптический модулятор (кристалл) работает в поперечном режиме с электрооптическим коэффициентом r » 4·10-11 при микроволновой диэлектрической проницаемости e = 55e0 . Максимальная глубина модуляции — Гm = p/3;
— коллимирующая и принимающая линзы имеют размеры 10 см;
— соотношение сигнал/шум на выходе усилителя,
Определим общую мощность источника постоянного тока, которым спутник должен снабжаться, чтобы удовлетворить требованиям задания на проектирование (определим сначала уровень оптической мощности передаваемого излучения, а затем мощность модуляции, необходимую для работы).
Решение : Синхронный спутник имеет период обращения 24 часа. Расстояние от Земли до спутника определяем из равенства центробежной и гравитационной сил
mV2 /RE — S = mg(RЗем )2 /(RE — S )2 ,
где V — скорость спутника; m — его масса; g — гравитационное ускорение у поверхности Земли; RE — S — расстояние от центра Земли до спутника; RЗем — радиус Земли.
Синхронная орбитальная частота вращения (24 часа) позволяет определить
V/RE — S = 2p/(24×60×60), тогда RE — S = 42 222 км.
Расстояние между спутниками R = 73 12 км при разносе в 120О . Если оптический сигнал мощностью РТ передается в телесном угле WT и принимаемая апертура обеспечивает телесный угол WR , то принимаемая мощность
PR = PT (WR /WT ).
Передаваемый оптический пучок (рис. 35) дифрагирует с углом расходимости qпучка , который связан с минимальным радиусом пучка v0 выражением
qпучка = l/pv0 .
Соответствующий телесный угол WT = p(qпучка )2 .
Если принять v0 равным радиусу dт передающей линзы, то
WT = l2 /(pd2 T ).
Телесный угол приемника равен
WR = pd2 R /R2 ,
— расстояние между передатчиком и приемником.
Из (42), (44), (45) имеем
PT = PR R2 l2 /p2 a2 T a2 R .
Запишем соотношение сигнал/шум на выходе ФЭУ, работающем в режиме квантового ограничения (т.е. когда основной источник шума — дробовый шум самого сигнала):
с/ш = 2 (PR eh/hn)2 G2 /G2 eid = PR h/hnDn,
где РR — оптическая мощность, G — коэффициент усиления по току, id — темновой ток. При l = 0,53 мкм, h = 0,2 — эффективность преобразования мощности, Dn = 109 Гц с/ш = 103 получим РR » 2·10-6 . При этом требуемая мощность в соответствии с (46) при R = 7,5·104 м составит Рт » »3 Вт.
Система посадки и управления воздушным движением
Эта система с помощью соответствующих технических средств осуществляет:
— привод ЛА в район посадки;
— управление воздушным движением в районе посадки;
— посадку и организацию движения по летному полю.
Средства привода должны обеспечивать непрерывное указание экипажу направления на аэродром и оставшегося расстояния до него с дальности порядка 250 км.
Средства управления воздушным движением должны обеспечивать создание зон ожидания в районе посадки, управление движением отдельных ЛА с целью предупреждения столкновений, информацию экипажа об особенностях захода на посадку и выполнения посадки и т.п. Дальность их действия порядка 150 км.
Средства, позволяющие осуществить посадки, должны указывать экипажу плоскость посадочного курса, плоскость планирования и расстояние до оптимальной точки приземления на ВПП (рис. 10).
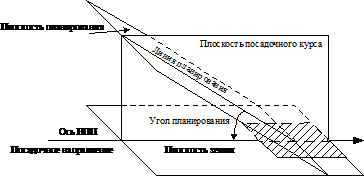
Рис. 10
Требуемая точность посадки достигается при ширине зоны курса, равной примерно 1О и зоны планирования — 0,5О . Указанные величины отклонения ЛА от плоскости посадочного курса должно производиться непрерывно до момента приземления, начиная с дальности 70 — 80 км, и от плоскости планирования — с дальности 25 — 4 км от начала ВПП.
Положение линии планирования должно быть стабилизировано по вертикали и горизонтали с точностью ±0,25О . Чувствительность аппаратуры должна обеспечивать индикацию смещения ЛА от заданной линии планирования на 0,25О влево или вправо и на 0,1О вверх или вниз.
Средства организации движения по летному полю должны обеспечивать раздельное наблюдение самолетов на летном поле и передачу им указаний о направлениях и порядке движения.
В настоящее время применяют три типа систем посадки: упрощенную; радиомаячную; радиолокационную.
Упрощенная система посадки
В составе бортового оборудования используются связная радиостанция, автоматический радиокомпас (АРК), радиовысотомер малых высот, радиоприемник сигналов маркерных радиомаяков (МРМ) и пилотажно-навигационные приборы (компас, авиагоризонт, часы и т.д.).
Управление работой системы осуществляют с командно-диспетчерского (КДП) или командно-стартового пункта (КСП).
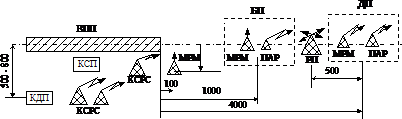
Рис. 11
Экипаж самолета, подходящего к аэродрому, устанавливает двустороннюю радиосвязь с руководителем полетов и, получив разрешение на посадку на данном аэродроме, сообщает ему о своем местонахождении, высоте полета, количестве оставшегося горючего и т.п. Руководитель полетов информирует экипаж об условиях посадки (курс, высота полета в районе аэродрома, метеоусловия и т.п.).
Привод самолетов осуществляется на дальнюю приводную радиостанцию (ПАР) с помощью АРК.
Расчет на посадку производят различными способами. Наиболее точным, хотя и наиболее длительным, способом захода на посадку является построение большой «коробочки» (рис. 12).
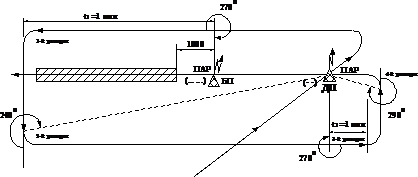
Рис. 12
Момент пролета над дальней ПАР фиксируется по сигналам маркерного маяка (два тире в секунду и повороту стрелки АРК на 180О ).
После пролета дальней ПАР экипаж выводит самолет на заданный посадочный курс и летит параллельно ВПП. АРК переключается на волну ближней ПАР.
После пролета траверсы ближней ПАР, когда курсовой угол радиостанции (КУР) равен 10О , экипаж продолжает полет тем же курсом в течение примерно 1 мин, после чего производится разворот на 90О и переключение АРК на волну дальней ПАР. Когда КУР дальней ПАР станет равным 240О , производится второй поворот на 90О и продолжается полет по новому курсу.
При прохождении траверсы дальней ПАР (КУР = 10О ) фиксируется время и примерно через 1 мин производится третий поворот на 90О , после чего полет продолжается до достижения КУР дальней ПАР, отметки 4О . В этот момент производится четвертый разворот, после которого самолет выходит на курс посадки. С этим курсом производится полет на дальнюю ПАР и пробивание облачности. Правильность курса можно проверить переключая АРК на ближнюю ПАР. При этом стрелка АРК должна оставаться на нуле. К дальней ПАР самолет должен подойти на высоте Н = 200 м, что контролируется с помощью радиовысотомера. После этого АРК переключается на волну ближней ПАР и продолжает дальнейшее снижение. В момент пролета ближней ПАР (системы ближнего МРМ — шесть точек в секунду) высота должна быть Н2 = 50 — 80 м (рис. 13).
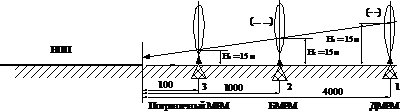
Рис. 13
Дальнейшее снижение осуществляется с помощью визуальной ориентировки по наземному светотехническому оборудованию системы. Над пограничным маркерным радиомаяком (если он установлен) самолет должен пролететь на Н3 = 15 м.
Наземный радиопеленгатор служит для контроля положения самолетов относительно аэродрома и может обеспечить расчет захода на посадку, например при выходе из строя АРК. В последнем случае экипаж управляет ЛА по команде с земли.
Эта упрощенная система посадки может использоваться при наличии горизонтальной видимости не менее 500 — 1000 м и высоте нижней кромки облаков не менее 60 м. Пропускная способность системы 15 — 20 ЛА в час. Контроль и управление движением самолетов во внешней зоне в районе аэродрома и при посадке система не обеспечивает, что является ее существенным недостатком, так как не гарантирует безопасность полета при наличии большого количества ЛА в воздухе.
Преимуществом упрощенной системы является простота оборудования, дающая возможность применять ее для любых типов самолетов и аэродромов.
Радиомаячная система посадки
В состав РМС входит оборудование упрощенной системы и дополнительно включается диспетчерское и радиомаячное оборудование.
Наблюдение за воздушной обстановкой в радиусе 200 — 250 км производится с помощью обзорного радиолокатора. Диспетчерский радиолокатор обеспечивает наблюдение и управление движением самолетов в радиусе порядка 150 км и на летном поле.
Автоматический УКВ-радиопеленгатор служит для опознания отдельных самолетов и групп, находящихся в районе аэродрома, а также для определения азимута летящих объектов с расстояния 100 — 150 км. Опознание производится путем пеленгации бортовой УКВ-радиостанции радиопеленгатором, а определение дальности до него — по индикатору обзорного или диспетчерского радиолокатора (на который передается от радиопеленгатора отметка пеленга).
Вычислительные устройства используют для обработки информации о прибывающих и находящихся в районе аэродрома самолетах; на этой основе производится определение порядка посадки и движения самолетов. Средства командной радиосвязи состоят из нескольких КВ- и УКВ-радиостанций, каждая из которых обслуживает полет в заданной зоне. Управление системой производится с КДП, на котором устанавливают выносные индикаторы, радиолокаторов и радиопеленгатора, а также средствами дистанционного управления радиостанциями.
Радиомаячное оборудование состоит из курсового и глиссадного радиомаяков, устанавливаемых на земле, и соответствующих бортовых радиоприемников и служит для указания экипажу линии планирования при посадке (в состав радиомаячного оборудования могут включаться и маркерные радиомаяки, входящие в упрощенную систему посадки).
Курсовой радиомаяк, создающий равносигнальную плоскость, совпадающую с вертикальной плоскостью посадочного курса, устанавливают позади ВПП на продолжении ее оси. Глиссадный радиомаяк предназначен для указания экипажу плоскости планирования, с которой совпадает создаваемая радиомаяком равносигнальная плоскость; его устанавливают обычно слева от ВПП на расстоянии 100 — 150 м от ее оси (так, чтобы антенна маяка не мешала посадке), примерно на траверсе оптимальной точки приземления. Известны глиссадные радиомаяки с невыступающими антеннами, устанавливаемыми непосредственно на оси ВПП.
Радиомаячная система посадки обеспечивает снижение до высоты порядка 15 — 20 м. Дальнейшее снижение проводят на основании визуальных наблюдений ВПП (с помощью светотехнической аппаратуры).
Вывод самолета в районе аэродрома и выполнение захода на посадку осуществляется с использованием средств «упрощенной системы», а также обзорного и диспетчерского радиолокаторов. В процессе захода на посадку руководитель полетов дает экипажу указания на установление связи по каналу посадки и сообщает условия посадки. Вход ЛА в зону курсового радиомаяка должен выполняться таким образом, чтобы индикаторы курсового приемника, радиокомпаса и гирополукомпаса одновременно показывали нулевое значение. При правильном заходе полет после этого продолжается до момента входа в зону глиссадного маяка, после чего контролируется правильность выполнения посадки по индикаторам курсового и глиссадного приемников. После выполнения посадки руководитель полетов дает экипажу указания о направлении и порядке движения к месту стоянки.
Пропускная способность РМС примерно 4 самолетов в час. Ответственность за правильное выполнение посадки при исправной работе наземного оборудования ложится в основном на экипаж самолета.
Выходные сигналы курсового и глиссадного радиоприемников, пропорциональные угловым отклонениям центра тяжести ЛА от линии планирования, могут быть использованы в качестве сигналов рассогласования при автоматизации процесса посадки.
Радиолокационная система посадки
При выполнении посадки положение ЛА относительно линии планирования и ВПП определяется с помощью посадочного радиолокатора, операторы которого определяют требуемый маневр самолета и передают команды управления экипажу по радиотелефонному каналу.
Посадочный радиолокатор работает в сантиметровом диапазоне длин волн и позволяет определить азимут, угол места и расстояние до самолета.
Азимут отсчитывается относительно оси ВПП, угол места — относительно линии горизонта. Дальность — относительно оптимальной точки приземления.
Система позволяет производить посадку в таких же метеоусловиях, что и радиомаячная. Снижение с помощью посадочного радиолокатора осуществляется до высоты порядка 20 — 4 м, после чего требуется визуальная ориентировка. Пропускная способность системы 15 — 20 самолетов в час. Она может быть повышена при автоматизации в радиолокаторе процессов съема координат самолета и передачи команд управления.
При определенных условиях для выполнения посадки могут быть использованы активные или пассивные РЛС, обеспечивающие возможность наблюдения на экране ЭЛТ изображения ВПП.
1. Червяков Г.Г. Применение Электронных приборов и устройств. Ч. 1. — Таганрог: Изд-во ТРТУ, 1999. — 60 с. (№2571).
. Червяков Г.Г. Микроволновые полупроводниковые устройства. — Таганрог: Изд-во ТРТУ, 2002. — 63 с. (№2571-2).
. Червяков Г.Г. Электронные устройства. — Таганрог: Изд-во ТРТУ, 2003. — 165 с. (№2571-3).
. Малышев В.А., Червяков Г.Г., Ганзий Д.Д. Нелинейные микроволновые полупроводниковые устройства. — Таганрог: Изд-во ТРТУ. 2001. — 354 с.
. Малышев В.А. Бортовые активные устройства сверхвысоких частот. — Л.: Судостроение, 1990. — 264 с.
6. Пении П.И., Филиппов Л.И. Радиотехнические системы передачи информации. — М.: Радио и связь, 1984. — 256 с.
7. Белавин О.В. Основы радионавигации: Учебное пособие для вузов. — М.: Сов.радио, 1977. — 320 с.
8. Пестряков В.В., Кузенков В.Д. Радиотехнические системы: Учебник для вузов. — М.: Радио и связь, 1985. — 376 с.
9. Ширман Я.Д., Голиков В.Н. и др. Теоретические основы радиолокации. — М.: Сов.радио, 1970. — 364 с.
. Кинкулькин В.Е. и др. Фазовые методы определения координат. — М.: Сов.радио, 1977. — 20 с.
11. Теоретические основы радиолокации/ Под ред. В.А. Дулевича. -М.: Сов.радио, 1978. -607 с.
. Финкельштейн М.И. Основы радиолокации. -М.: Радио и связь, 1983. -320 с.
. Марков В.В. Радиорелейная связь. — М.: Связь, 1979. — 198 с.
14. Ацеров Ю.С. Морская международная спутниковая система связи «Инморсат». — М.: Электросвязь, 1982. №12. с. 14 — 16.
. Ярив А. Введение в оптическую электронику/ Пер. с англ. Г.Л. Киселева; Под ред. О.В. Богданкевича. — М.: Высш.шк., 1983. — 398 с.
16. Оптика и связь /А. Козанне, Ж. Флере, Г. Мэтр, М. Руссо: Пер. с франц.; Под ред. В.К. Соколова. — М.: Мир, 1984. — 502 с.
. Оптическая связь: Пер. с англ.; Под ред. И.И. Теумина. — М.: Радио и связь, 1984. — 384 с.
. Воронина Э.И., Привалов В.Е., Шеманин В.Г. Расчет параметров лазерного дистанционного зондирования молекулярного водорода // РАН. Научное приборостроение. 1998. Т.8. №1 — 2. С. 68 — 70.
. Межерис Р. Лазерное дистанционное зондирование. — М.: Мир, 1987. — 550 с.
20. Оптические системы передачи: Уч.для вузов/ Под ред. В.И. Иванова. — М.: Радио и связь, 1994. — 224 с.
. Обоимов А.Я., Деревянко С.А. Проблемы организации сети подвижной радиосвязи общего пользования // Электросвязь. 1991. №8. — 236 с.
. Adrew J. Viterbi. GDMA. Principles of Spread Communication. Addison-Wesley Wireless Communication Series. 1997. Р.148
. DX200 GENERAL DESCRIBTION (MTX) NOKIA. Telecommunikations 1990.
. Ли, Уильям К. Техника подвижных систем связи. — М.: Радио и связь, 1985.
. Гольдштейн Б.С. Сигнализация в сетях связи. — М.: Радио и связь, 1997.
. Мухин А.М., Чайников Л.С. Энциклопедия мобильной связи. Системы подвижной службы общего пользования. — СПб: Наука и техника, 2001. — 201 с.